 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Towards Real-time Scalable Dense Mapping using Robot-centric Implicit Representation
Jun 18, 2023
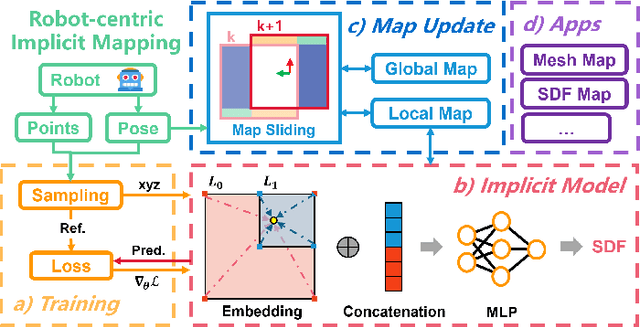
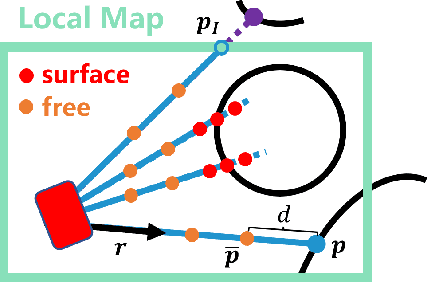
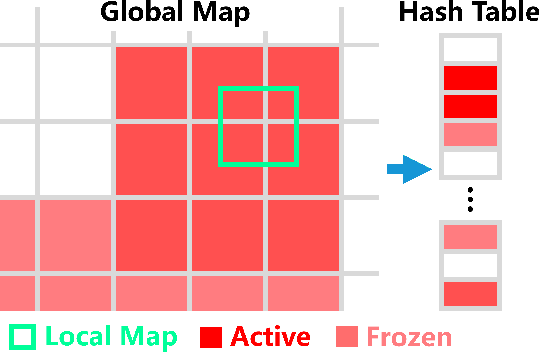
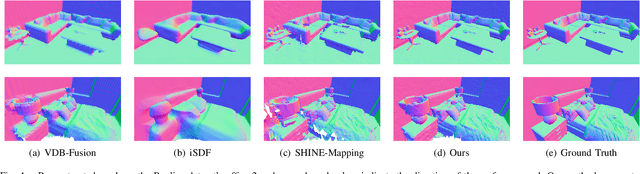
Real-time and high-quailty dense mapping is essential for robots to perform fine tasks. However, most existing methods can not achieve both speed and quality. Recent works have shown that implicit neural representations of 3D scenes can produce remarkable results, but they are limited to small scenes and lack real-time performance. To address these limitations, we propose a real-time scalable mapping method using robot-centric implicit representation. We train implicit features with a multi-resolution local map and decode them as signed distance values through a shallow neural network. We maintain the learned features in a scalable manner using a global map that consists of a hash table and a submap set. We exploit the characteristics of the local map to achieve highly efficient training and mitigate the catastrophic forgetting problem in incremental implicit mapping. Extensive experiments validate that our method outperforms existing methods in reconstruction quality, real-time performance, and applicability. The code of our system will be available at \url{https://github.com/HITSZ-NRSL/RIM.git}.
A flexible and accurate total variation and cascaded denoisers-based image reconstruction algorithm for hyperspectrally compressed ultrafast photography
Sep 06, 2023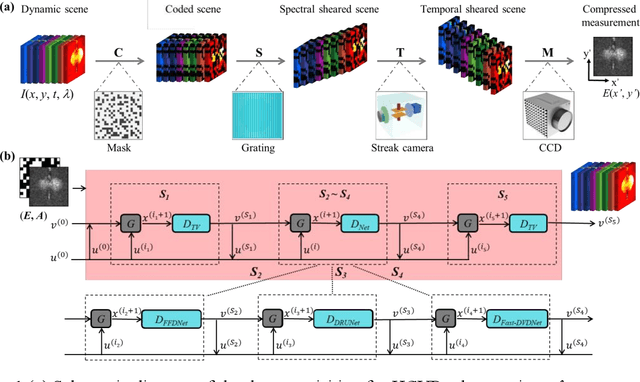
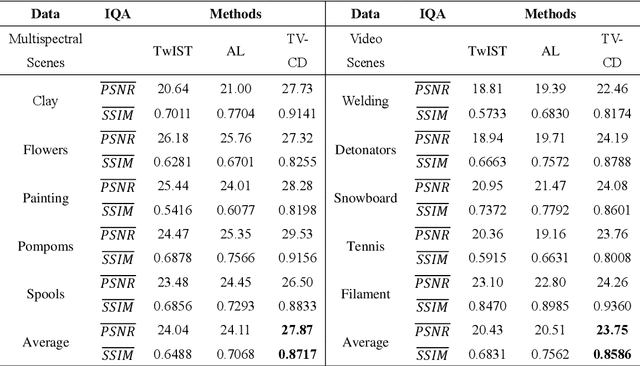
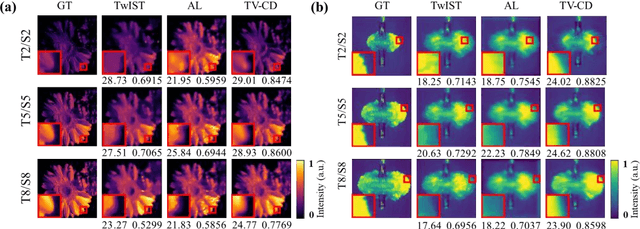
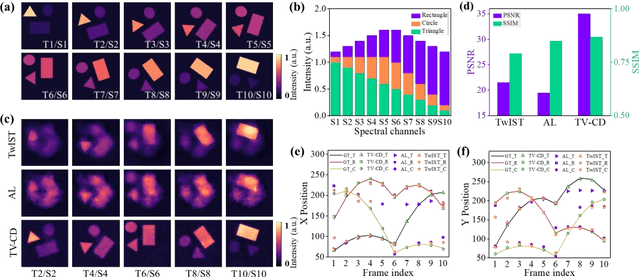
Hyperspectrally compressed ultrafast photography (HCUP) based on compressed sensing and the time- and spectrum-to-space mappings can simultaneously realize the temporal and spectral imaging of non-repeatable or difficult-to-repeat transient events passively in a single exposure. It possesses an incredibly high frame rate of tens of trillions of frames per second and a sequence depth of several hundred, and plays a revolutionary role in single-shot ultrafast optical imaging. However, due to the ultra-high data compression ratio induced by the extremely large sequence depth as well as the limited fidelities of traditional reconstruction algorithms over the reconstruction process, HCUP suffers from a poor image reconstruction quality and fails to capture fine structures in complex transient scenes. To overcome these restrictions, we propose a flexible image reconstruction algorithm based on the total variation (TV) and cascaded denoisers (CD) for HCUP, named the TV-CD algorithm. It applies the TV denoising model cascaded with several advanced deep learning-based denoising models in the iterative plug-and-play alternating direction method of multipliers framework, which can preserve the image smoothness while utilizing the deep denoising networks to obtain more priori, and thus solving the common sparsity representation problem in local similarity and motion compensation. Both simulation and experimental results show that the proposed TV-CD algorithm can effectively improve the image reconstruction accuracy and quality of HCUP, and further promote the practical applications of HCUP in capturing high-dimensional complex physical, chemical and biological ultrafast optical scenes.
Amortised Inference in Bayesian Neural Networks
Sep 06, 2023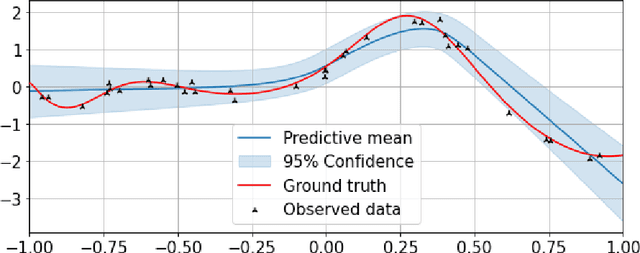

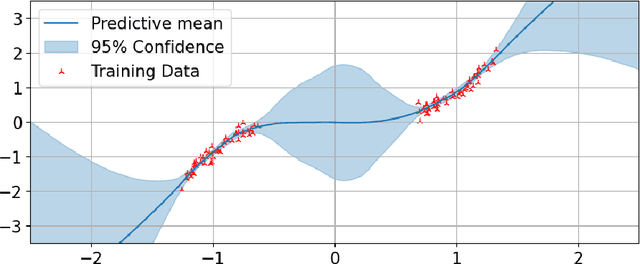
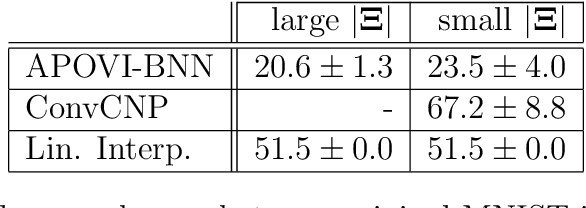
Meta-learning is a framework in which machine learning models train over a set of datasets in order to produce predictions on new datasets at test time. Probabilistic meta-learning has received an abundance of attention from the research community in recent years, but a problem shared by many existing probabilistic meta-models is that they require a very large number of datasets in order to produce high-quality predictions with well-calibrated uncertainty estimates. In many applications, however, such quantities of data are simply not available. In this dissertation we present a significantly more data-efficient approach to probabilistic meta-learning through per-datapoint amortisation of inference in Bayesian neural networks, introducing the Amortised Pseudo-Observation Variational Inference Bayesian Neural Network (APOVI-BNN). First, we show that the approximate posteriors obtained under our amortised scheme are of similar or better quality to those obtained through traditional variational inference, despite the fact that the amortised inference is performed in a single forward pass. We then discuss how the APOVI-BNN may be viewed as a new member of the neural process family, motivating the use of neural process training objectives for potentially better predictive performance on complex problems as a result. Finally, we assess the predictive performance of the APOVI-BNN against other probabilistic meta-models in both a one-dimensional regression problem and in a significantly more complex image completion setting. In both cases, when the amount of training data is limited, our model is the best in its class.
A recommender for the management of chronic pain in patients undergoing spinal cord stimulation
Sep 06, 2023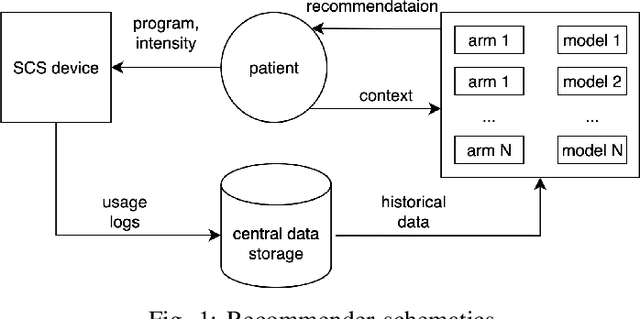
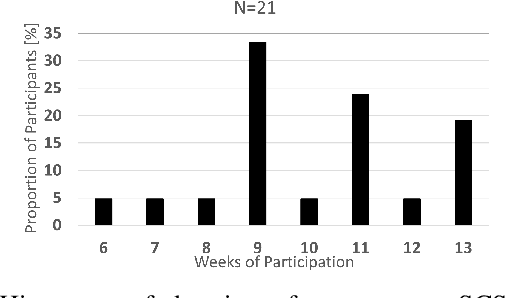
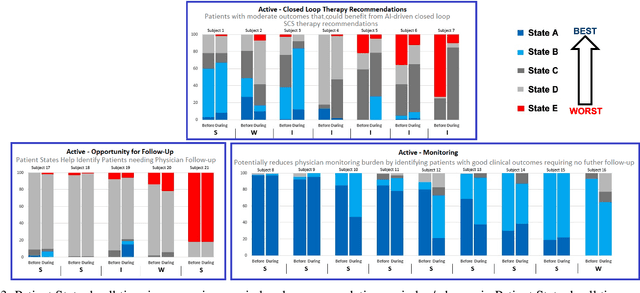
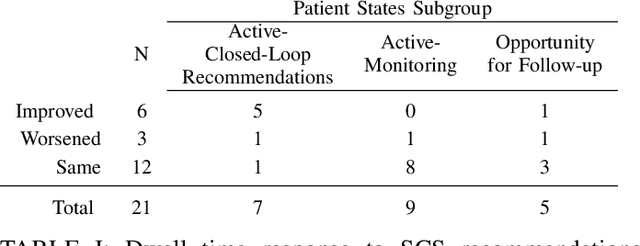
Spinal cord stimulation (SCS) is a therapeutic approach used for the management of chronic pain. It involves the delivery of electrical impulses to the spinal cord via an implanted device, which when given suitable stimulus parameters can mask or block pain signals. Selection of optimal stimulation parameters usually happens in the clinic under the care of a provider whereas at-home SCS optimization is managed by the patient. In this paper, we propose a recommender system for the management of pain in chronic pain patients undergoing SCS. In particular, we use a contextual multi-armed bandit (CMAB) approach to develop a system that recommends SCS settings to patients with the aim of improving their condition. These recommendations, sent directly to patients though a digital health ecosystem, combined with a patient monitoring system closes the therapeutic loop around a chronic pain patient over their entire patient journey. We evaluated the system in a cohort of SCS-implanted ENVISION study subjects (Clinicaltrials.gov ID: NCT03240588) using a combination of quality of life metrics and Patient States (PS), a novel measure of holistic outcomes. SCS recommendations provided statistically significant improvement in clinical outcomes (pain and/or QoL) in 85\% of all subjects (N=21). Among subjects in moderate PS (N=7) prior to receiving recommendations, 100\% showed statistically significant improvements and 5/7 had improved PS dwell time. This analysis suggests SCS patients may benefit from SCS recommendations, resulting in additional clinical improvement on top of benefits already received from SCS therapy.
Efficient Defense Against Model Stealing Attacks on Convolutional Neural Networks
Sep 04, 2023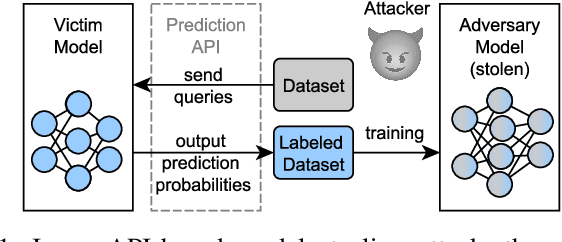
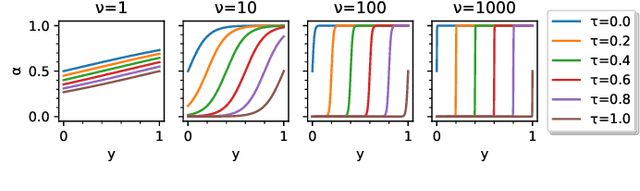
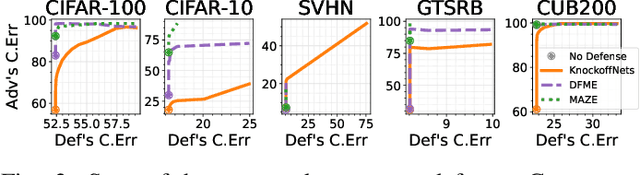
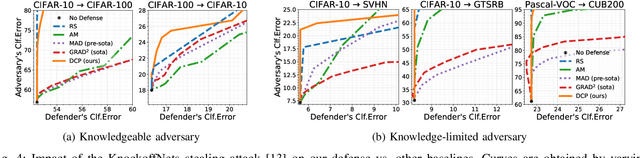
Model stealing attacks have become a serious concern for deep learning models, where an attacker can steal a trained model by querying its black-box API. This can lead to intellectual property theft and other security and privacy risks. The current state-of-the-art defenses against model stealing attacks suggest adding perturbations to the prediction probabilities. However, they suffer from heavy computations and make impracticable assumptions about the adversary. They often require the training of auxiliary models. This can be time-consuming and resource-intensive which hinders the deployment of these defenses in real-world applications. In this paper, we propose a simple yet effective and efficient defense alternative. We introduce a heuristic approach to perturb the output probabilities. The proposed defense can be easily integrated into models without additional training. We show that our defense is effective in defending against three state-of-the-art stealing attacks. We evaluate our approach on large and quantized (i.e., compressed) Convolutional Neural Networks (CNNs) trained on several vision datasets. Our technique outperforms the state-of-the-art defenses with a $\times37$ faster inference latency without requiring any additional model and with a low impact on the model's performance. We validate that our defense is also effective for quantized CNNs targeting edge devices.
Physics-Informed Polynomial Chaos Expansions
Sep 04, 2023Surrogate modeling of costly mathematical models representing physical systems is challenging since it is typically not possible to create a large experimental design. Thus, it is beneficial to constrain the approximation to adhere to the known physics of the model. This paper presents a novel methodology for the construction of physics-informed polynomial chaos expansions (PCE) that combines the conventional experimental design with additional constraints from the physics of the model. Physical constraints investigated in this paper are represented by a set of differential equations and specified boundary conditions. A computationally efficient means for construction of physically constrained PCE is proposed and compared to standard sparse PCE. It is shown that the proposed algorithms lead to superior accuracy of the approximation and does not add significant computational burden. Although the main purpose of the proposed method lies in combining data and physical constraints, we show that physically constrained PCEs can be constructed from differential equations and boundary conditions alone without requiring evaluations of the original model. We further show that the constrained PCEs can be easily applied for uncertainty quantification through analytical post-processing of a reduced PCE filtering out the influence of all deterministic space-time variables. Several deterministic examples of increasing complexity are provided and the proposed method is applied for uncertainty quantification.
Detection of Pedestrian Turning Motions to Enhance Indoor Map Matching Performance
Sep 04, 2023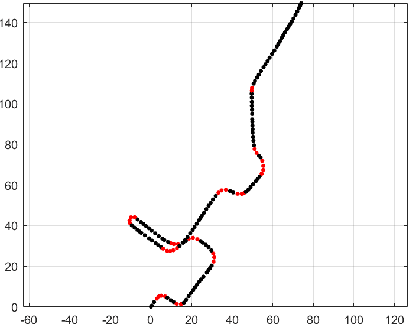
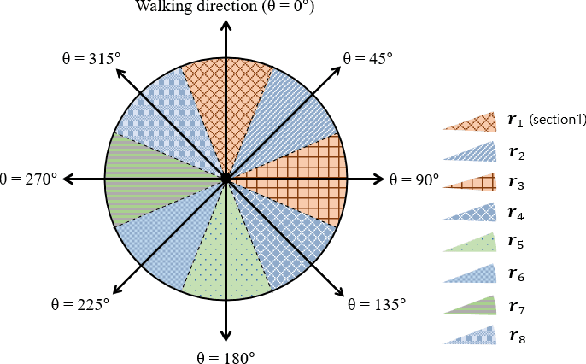
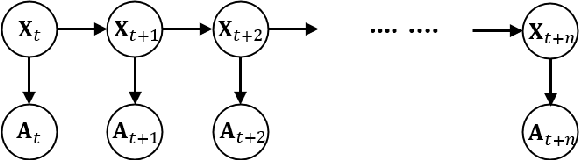
A pedestrian navigation system (PNS) in indoor environments, where global navigation satellite system (GNSS) signal access is difficult, is necessary, particularly for search and rescue (SAR) operations in large buildings. This paper focuses on studying pedestrian walking behaviors to enhance the performance of indoor pedestrian dead reckoning (PDR) and map matching techniques. Specifically, our research aims to detect pedestrian turning motions using smartphone inertial measurement unit (IMU) information in a given PDR trajectory. To improve existing methods, including the threshold-based turn detection method, hidden Markov model (HMM)-based turn detection method, and pruned exact linear time (PELT) algorithm-based turn detection method, we propose enhanced algorithms that better detect pedestrian turning motions. During field tests, using the threshold-based method, we observed a missed detection rate of 20.35% and a false alarm rate of 7.65%. The PELT-based method achieved a significant improvement with a missed detection rate of 8.93% and a false alarm rate of 6.97%. However, the best results were obtained using the HMM-based method, which demonstrated a missed detection rate of 5.14% and a false alarm rate of 2.00%. In summary, our research contributes to the development of a more accurate and reliable pedestrian navigation system by leveraging smartphone IMU data and advanced algorithms for turn detection in indoor environments.
Half-Duplex APs with Dynamic TDD vs. Full-Duplex APs in Cell-Free Systems
Sep 04, 2023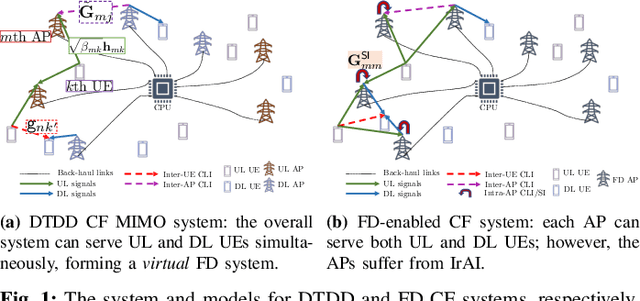

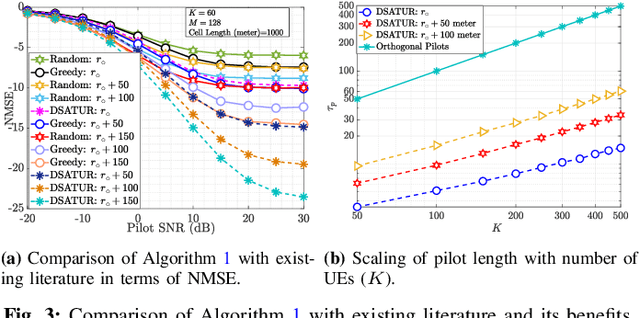
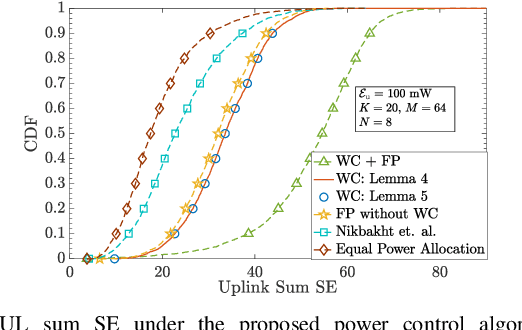
In this paper, we present a comparative study of half-duplex (HD) access points (APs) with dynamic time-division duplex (DTDD) and full-duplex (FD) APs in cell-free (CF) systems. Although both DTDD and FD CF systems support concurrent downlink transmission and uplink reception capability, the sum spectral efficiency (SE) is limited by various cross-link interferences. We first present a novel pilot allocation scheme that minimizes the pilot length required to ensure no pilot contamination among the user equipments (UEs) served by at least one common AP. Then, we derive the sum SE in closed form, considering zero-forcing combining and precoding along with the signal-to-interference plus noise ratio optimal weighting at the central processing unit. We also present a provably convergent algorithm for joint uplink-downlink power allocation and uplink/downlink mode scheduling of the APs (for DTDD) to maximize the sum SE. Our numerical results illustrate the superiority of the proposed algorithms over several benchmarks and show that the sum SE with DTDD can outperform an FD CF system with similar antenna density. Thus, DTDD combined with CF is a promising alternative to FD that attains the same performance using HD APs, while obviating the burden of intra-AP interference cancellation.
Conversational Swarm Intelligence, a Pilot Study
Aug 31, 2023Conversational Swarm Intelligence (CSI) is a new method for enabling large human groups to hold real-time networked conversations using a technique modeled on the dynamics of biological swarms. Through the novel use of conversational agents powered by Large Language Models (LLMs), the CSI structure simultaneously enables local dialog among small deliberative groups and global propagation of conversational content across a larger population. In this way, CSI combines the benefits of small-group deliberative reasoning and large-scale collective intelligence. In this pilot study, participants deliberating in conversational swarms (via text chat) (a) produced 30% more contributions (p<0.05) than participants deliberating in a standard centralized chat room and (b) demonstrated 7.2% less variance in contribution quantity. These results indicate that users contributed more content and participated more evenly when using the CSI structure.
Simple LLM Prompting is State-of-the-Art for Robust and Multilingual Dialogue Evaluation
Aug 31, 2023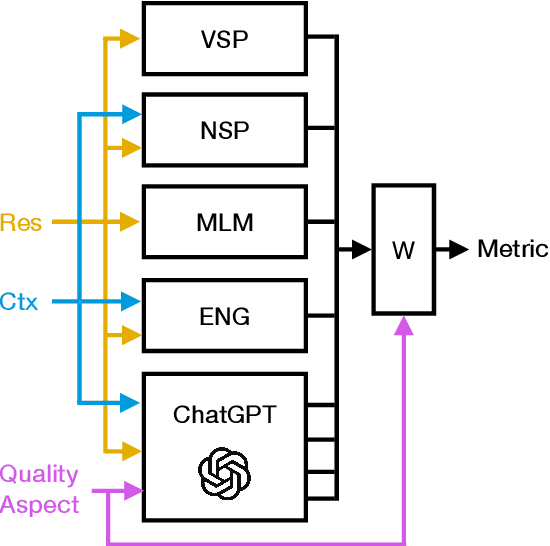
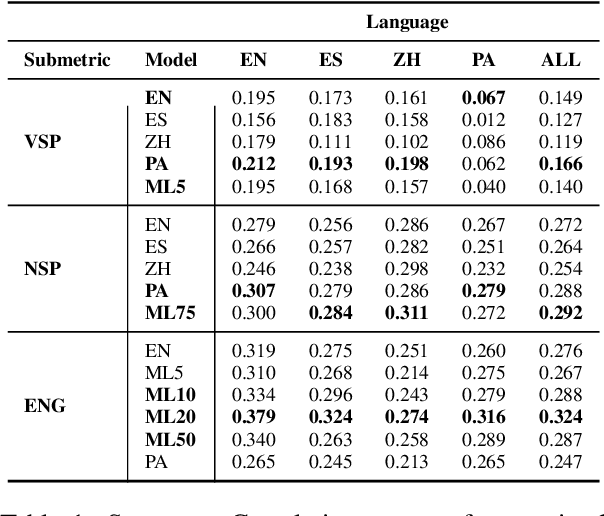

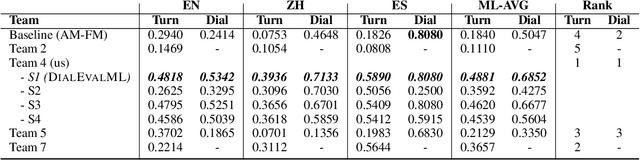
Despite significant research effort in the development of automatic dialogue evaluation metrics, little thought is given to evaluating dialogues other than in English. At the same time, ensuring metrics are invariant to semantically similar responses is also an overlooked topic. In order to achieve the desired properties of robustness and multilinguality for dialogue evaluation metrics, we propose a novel framework that takes advantage of the strengths of current evaluation models with the newly-established paradigm of prompting Large Language Models (LLMs). Empirical results show our framework achieves state of the art results in terms of mean Spearman correlation scores across several benchmarks and ranks first place on both the Robust and Multilingual tasks of the DSTC11 Track 4 "Automatic Evaluation Metrics for Open-Domain Dialogue Systems", proving the evaluation capabilities of prompted LLMs.