 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Partially Observable Deep Multi-Agent Active Inference Framework for Resource Allocation in 6G and Beyond Wireless Communications Networks
Aug 27, 2023
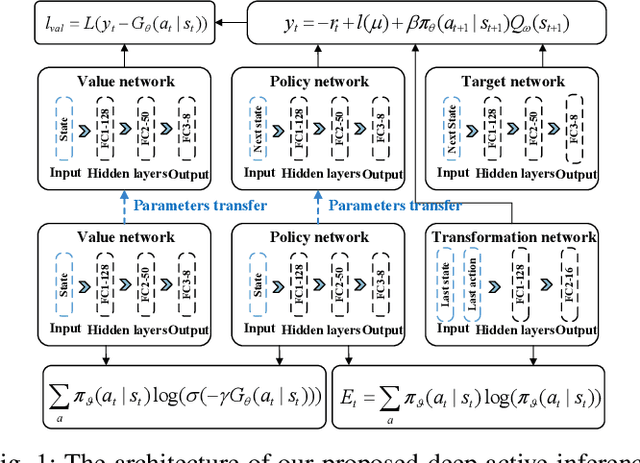
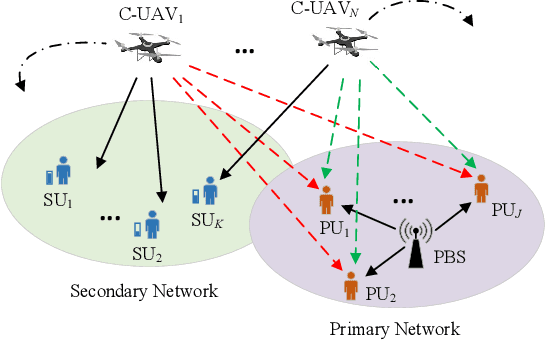
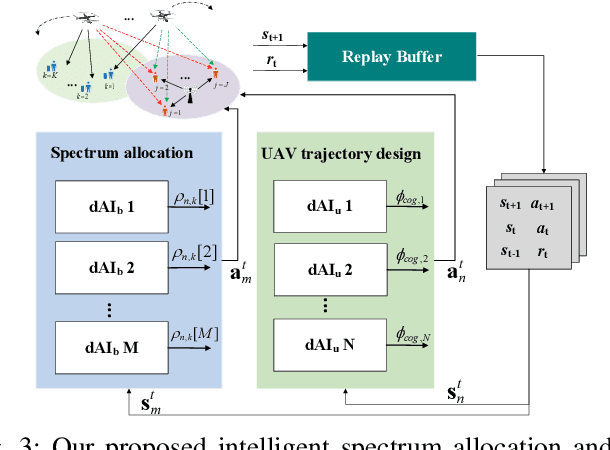
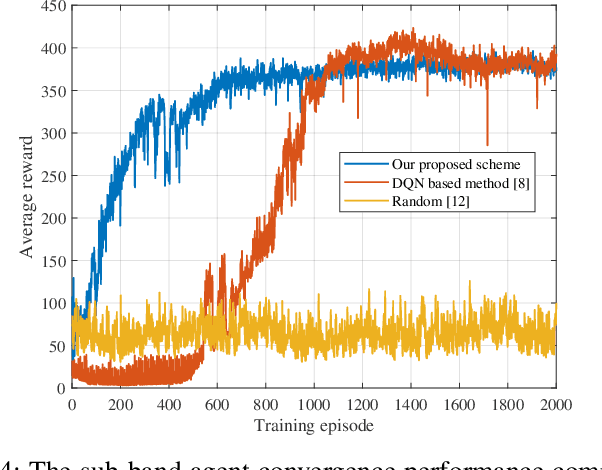
Resource allocation is of crucial importance in wireless communications. However, it is extremely challenging to design efficient resource allocation schemes for future wireless communication networks since the formulated resource allocation problems are generally non-convex and consist of various coupled variables. Moreover, the dynamic changes of practical wireless communication environment and user service requirements thirst for efficient real-time resource allocation. To tackle these issues, a novel partially observable deep multi-agent active inference (PODMAI) framework is proposed for realizing intelligent resource allocation. A belief based learning method is exploited for updating the policy by minimizing the variational free energy. A decentralized training with a decentralized execution multi-agent strategy is designed to overcome the limitations of the partially observable state information. Exploited the proposed framework, an intelligent spectrum allocation and trajectory optimization scheme is developed for a spectrum sharing unmanned aerial vehicle (UAV) network with dynamic transmission rate requirements as an example. Simulation results demonstrate that our proposed framework can significantly improve the sum transmission rate of the secondary network compared to various benchmark schemes. Moreover, the convergence speed of the proposed PODMAI is significantly improved compared with the conventional reinforcement learning framework. Overall, our proposed framework can enrich the intelligent resource allocation frameworks and pave the way for realizing real-time resource allocation.
Coupled Attention Networks for Multivariate Time Series Anomaly Detection
Jun 12, 2023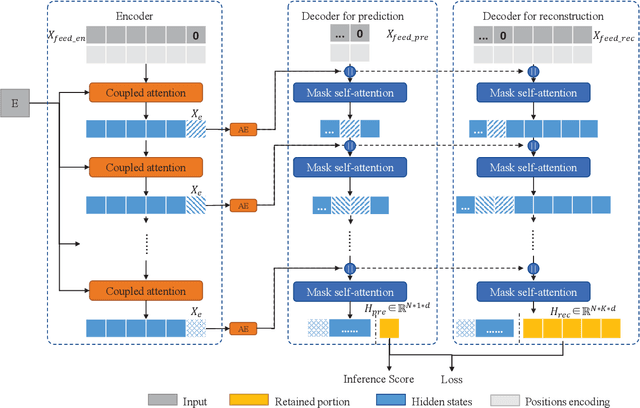
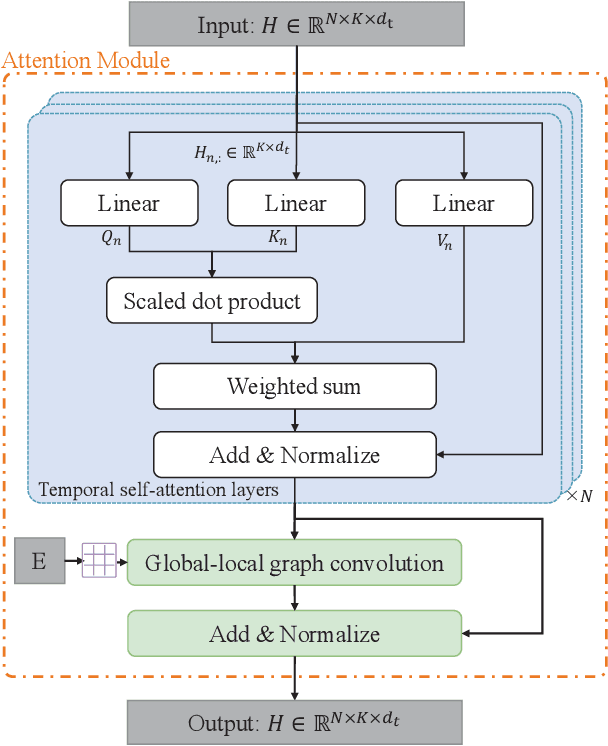
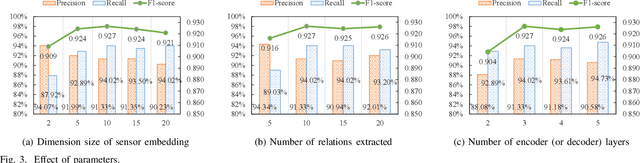
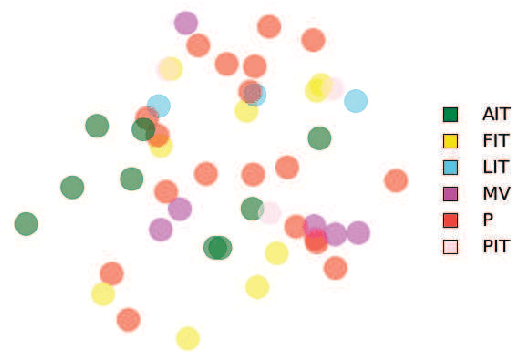
Multivariate time series anomaly detection (MTAD) plays a vital role in a wide variety of real-world application domains. Over the past few years, MTAD has attracted rapidly increasing attention from both academia and industry. Many deep learning and graph learning models have been developed for effective anomaly detection in multivariate time series data, which enable advanced applications such as smart surveillance and risk management with unprecedented capabilities. Nevertheless, MTAD is facing critical challenges deriving from the dependencies among sensors and variables, which often change over time. To address this issue, we propose a coupled attention-based neural network framework (CAN) for anomaly detection in multivariate time series data featuring dynamic variable relationships. We combine adaptive graph learning methods with graph attention to generate a global-local graph that can represent both global correlations and dynamic local correlations among sensors. To capture inter-sensor relationships and temporal dependencies, a convolutional neural network based on the global-local graph is integrated with a temporal self-attention module to construct a coupled attention module. In addition, we develop a multilevel encoder-decoder architecture that accommodates reconstruction and prediction tasks to better characterize multivariate time series data. Extensive experiments on real-world datasets have been conducted to evaluate the performance of the proposed CAN approach, and the results show that CAN significantly outperforms state-of-the-art baselines.
Solving Attention Kernel Regression Problem via Pre-conditioner
Aug 28, 2023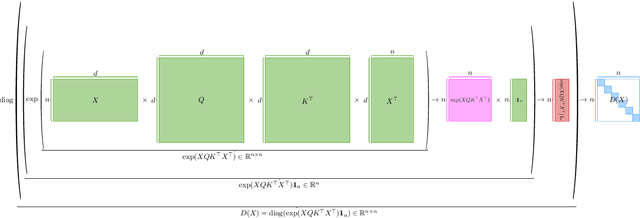
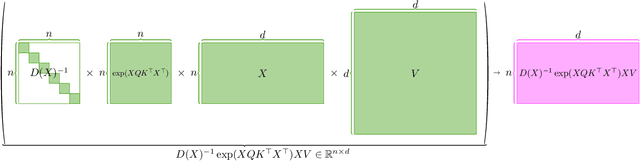
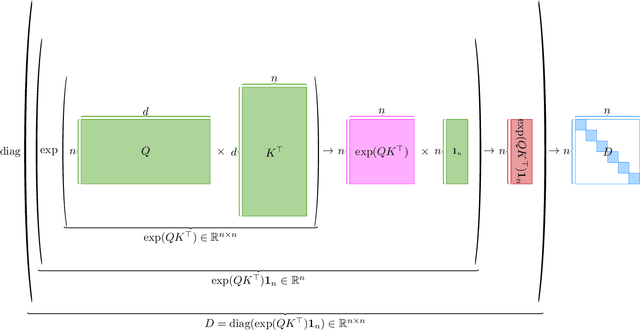
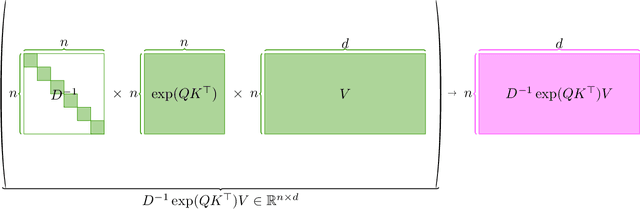
Large language models have shown impressive performance in many tasks. One of the major features from the computation perspective is computing the attention matrix. Previous works [Zandieh, Han, Daliri, and Karba 2023, Alman and Song 2023] have formally studied the possibility and impossibility of approximating the attention matrix. In this work, we define and study a new problem which is called the attention kernel regression problem. We show how to solve the attention kernel regression in the input sparsity time of the data matrix.
SparseBEV: High-Performance Sparse 3D Object Detection from Multi-Camera Videos
Sep 05, 2023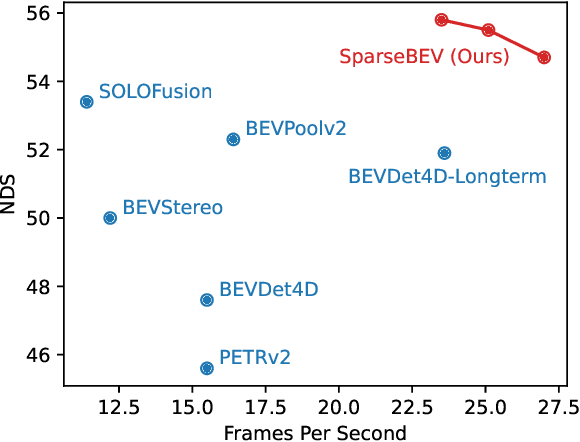
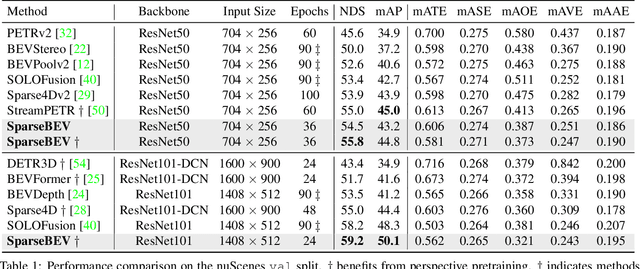
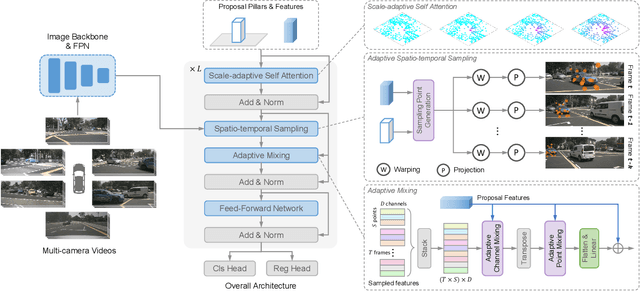
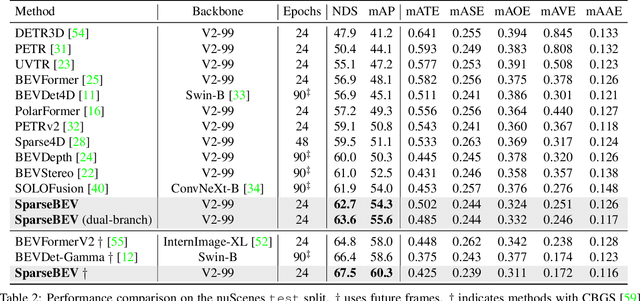
Camera-based 3D object detection in BEV (Bird's Eye View) space has drawn great attention over the past few years. Dense detectors typically follow a two-stage pipeline by first constructing a dense BEV feature and then performing object detection in BEV space, which suffers from complex view transformations and high computation cost. On the other side, sparse detectors follow a query-based paradigm without explicit dense BEV feature construction, but achieve worse performance than the dense counterparts. In this paper, we find that the key to mitigate this performance gap is the adaptability of the detector in both BEV and image space. To achieve this goal, we propose SparseBEV, a fully sparse 3D object detector that outperforms the dense counterparts. SparseBEV contains three key designs, which are (1) scale-adaptive self attention to aggregate features with adaptive receptive field in BEV space, (2) adaptive spatio-temporal sampling to generate sampling locations under the guidance of queries, and (3) adaptive mixing to decode the sampled features with dynamic weights from the queries. On the test split of nuScenes, SparseBEV achieves the state-of-the-art performance of 67.5 NDS. On the val split, SparseBEV achieves 55.8 NDS while maintaining a real-time inference speed of 23.5 FPS. Code is available at https://github.com/MCG-NJU/SparseBEV.
On the Complexity of Differentially Private Best-Arm Identification with Fixed Confidence
Sep 05, 2023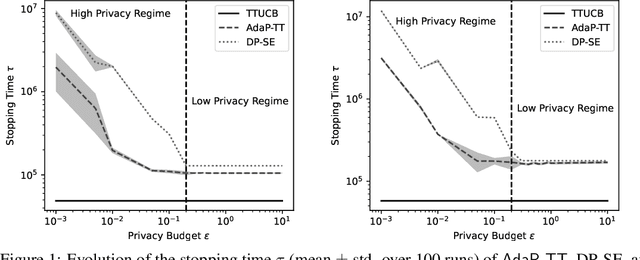
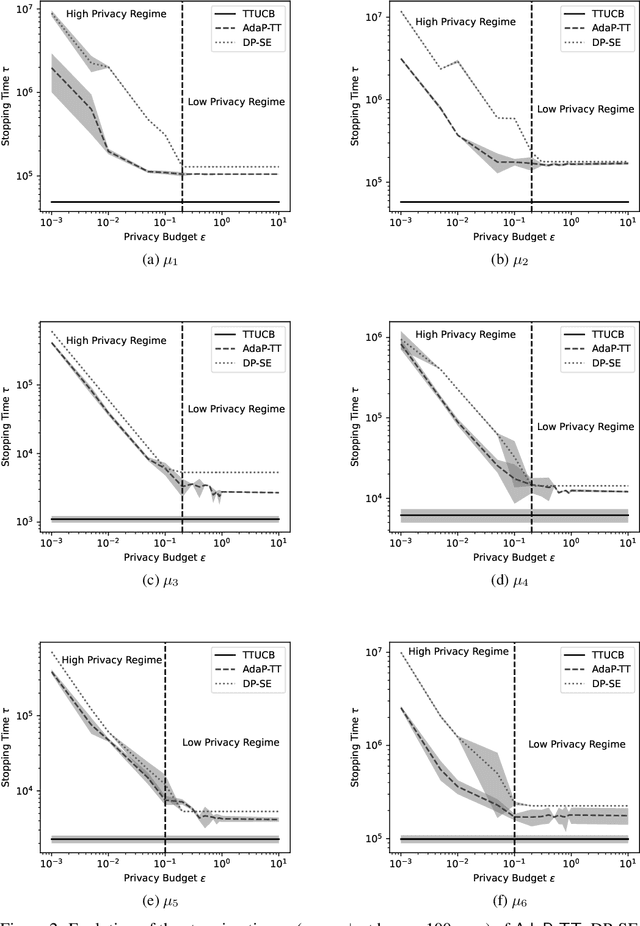
Best Arm Identification (BAI) problems are progressively used for data-sensitive applications, such as designing adaptive clinical trials, tuning hyper-parameters, and conducting user studies to name a few. Motivated by the data privacy concerns invoked by these applications, we study the problem of BAI with fixed confidence under $\epsilon$-global Differential Privacy (DP). First, to quantify the cost of privacy, we derive a lower bound on the sample complexity of any $\delta$-correct BAI algorithm satisfying $\epsilon$-global DP. Our lower bound suggests the existence of two privacy regimes depending on the privacy budget $\epsilon$. In the high-privacy regime (small $\epsilon$), the hardness depends on a coupled effect of privacy and a novel information-theoretic quantity, called the Total Variation Characteristic Time. In the low-privacy regime (large $\epsilon$), the sample complexity lower bound reduces to the classical non-private lower bound. Second, we propose AdaP-TT, an $\epsilon$-global DP variant of the Top Two algorithm. AdaP-TT runs in arm-dependent adaptive episodes and adds Laplace noise to ensure a good privacy-utility trade-off. We derive an asymptotic upper bound on the sample complexity of AdaP-TT that matches with the lower bound up to multiplicative constants in the high-privacy regime. Finally, we provide an experimental analysis of AdaP-TT that validates our theoretical results.
Graph-Based Interaction-Aware Multimodal 2D Vehicle Trajectory Prediction using Diffusion Graph Convolutional Networks
Sep 05, 2023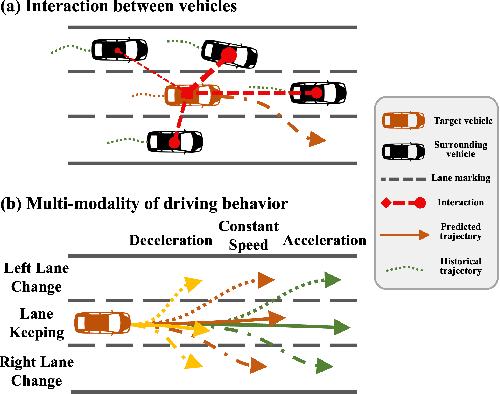
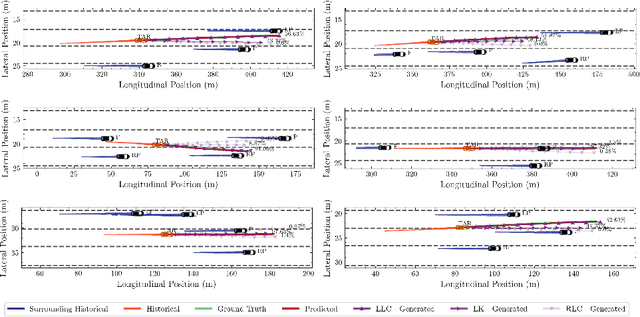
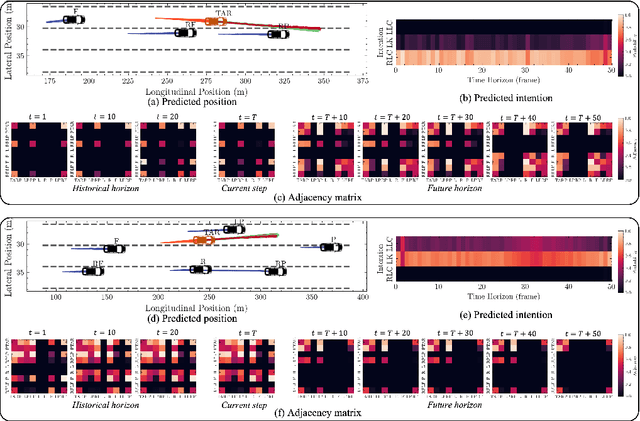
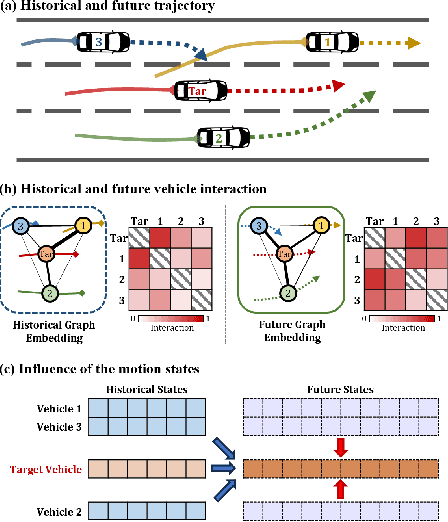
Predicting vehicle trajectories is crucial for ensuring automated vehicle operation efficiency and safety, particularly on congested multi-lane highways. In such dynamic environments, a vehicle's motion is determined by its historical behaviors as well as interactions with surrounding vehicles. These intricate interactions arise from unpredictable motion patterns, leading to a wide range of driving behaviors that warrant in-depth investigation. This study presents the Graph-based Interaction-aware Multi-modal Trajectory Prediction (GIMTP) framework, designed to probabilistically predict future vehicle trajectories by effectively capturing these interactions. Within this framework, vehicles' motions are conceptualized as nodes in a time-varying graph, and the traffic interactions are represented by a dynamic adjacency matrix. To holistically capture both spatial and temporal dependencies embedded in this dynamic adjacency matrix, the methodology incorporates the Diffusion Graph Convolutional Network (DGCN), thereby providing a graph embedding of both historical states and future states. Furthermore, we employ a driving intention-specific feature fusion, enabling the adaptive integration of historical and future embeddings for enhanced intention recognition and trajectory prediction. This model gives two-dimensional predictions for each mode of longitudinal and lateral driving behaviors and offers probabilistic future paths with corresponding probabilities, addressing the challenges of complex vehicle interactions and multi-modality of driving behaviors. Validation using real-world trajectory datasets demonstrates the efficiency and potential.
Domain Adaptation for Satellite-Borne Hyperspectral Cloud Detection
Sep 05, 2023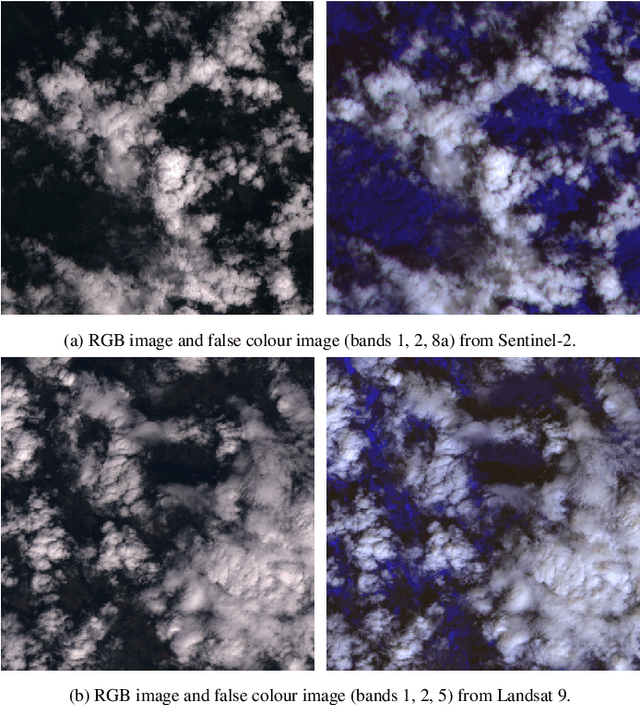
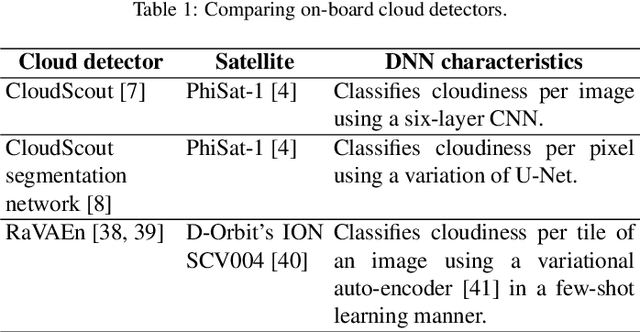
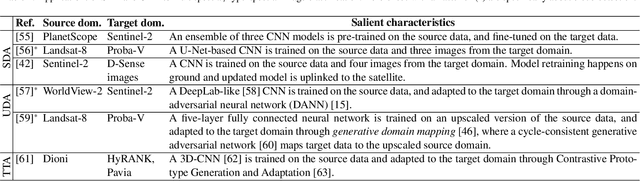
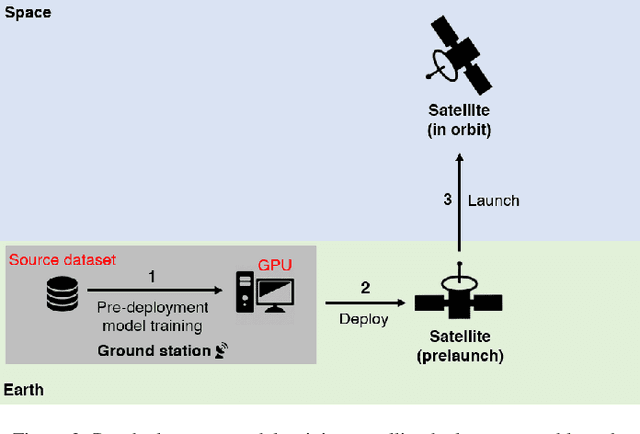
The advent of satellite-borne machine learning hardware accelerators has enabled the on-board processing of payload data using machine learning techniques such as convolutional neural networks (CNN). A notable example is using a CNN to detect the presence of clouds in hyperspectral data captured on Earth observation (EO) missions, whereby only clear sky data is downlinked to conserve bandwidth. However, prior to deployment, new missions that employ new sensors will not have enough representative datasets to train a CNN model, while a model trained solely on data from previous missions will underperform when deployed to process the data on the new missions. This underperformance stems from the domain gap, i.e., differences in the underlying distributions of the data generated by the different sensors in previous and future missions. In this paper, we address the domain gap problem in the context of on-board hyperspectral cloud detection. Our main contributions lie in formulating new domain adaptation tasks that are motivated by a concrete EO mission, developing a novel algorithm for bandwidth-efficient supervised domain adaptation, and demonstrating test-time adaptation algorithms on space deployable neural network accelerators. Our contributions enable minimal data transmission to be invoked (e.g., only 1% of the weights in ResNet50) to achieve domain adaptation, thereby allowing more sophisticated CNN models to be deployed and updated on satellites without being hampered by domain gap and bandwidth limitations.
Contrastive Learning of Temporal Distinctiveness for Survival Analysis in Electronic Health Records
Aug 24, 2023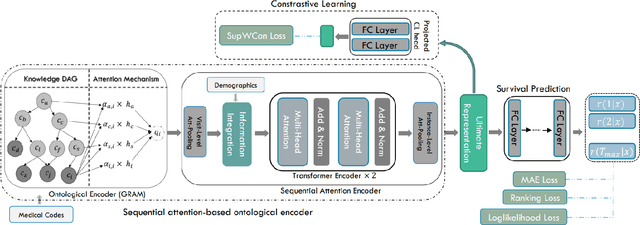
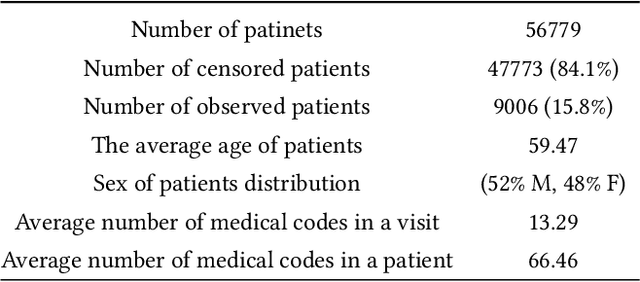
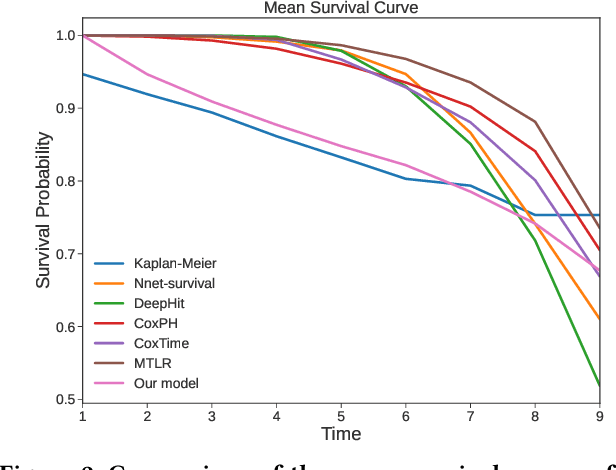
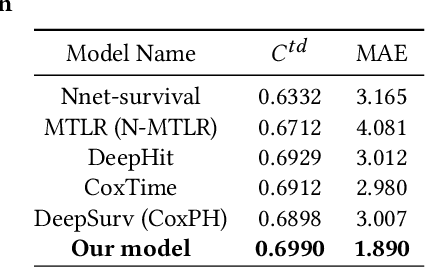
Survival analysis plays a crucial role in many healthcare decisions, where the risk prediction for the events of interest can support an informative outlook for a patient's medical journey. Given the existence of data censoring, an effective way of survival analysis is to enforce the pairwise temporal concordance between censored and observed data, aiming to utilize the time interval before censoring as partially observed time-to-event labels for supervised learning. Although existing studies mostly employed ranking methods to pursue an ordering objective, contrastive methods which learn a discriminative embedding by having data contrast against each other, have not been explored thoroughly for survival analysis. Therefore, in this paper, we propose a novel Ontology-aware Temporality-based Contrastive Survival (OTCSurv) analysis framework that utilizes survival durations from both censored and observed data to define temporal distinctiveness and construct negative sample pairs with adjustable hardness for contrastive learning. Specifically, we first use an ontological encoder and a sequential self-attention encoder to represent the longitudinal EHR data with rich contexts. Second, we design a temporal contrastive loss to capture varying survival durations in a supervised setting through a hardness-aware negative sampling mechanism. Last, we incorporate the contrastive task into the time-to-event predictive task with multiple loss components. We conduct extensive experiments using a large EHR dataset to forecast the risk of hospitalized patients who are in danger of developing acute kidney injury (AKI), a critical and urgent medical condition. The effectiveness and explainability of the proposed model are validated through comprehensive quantitative and qualitative studies.
Inferring dynamic regulatory interaction graphs from time series data with perturbations
Jun 13, 2023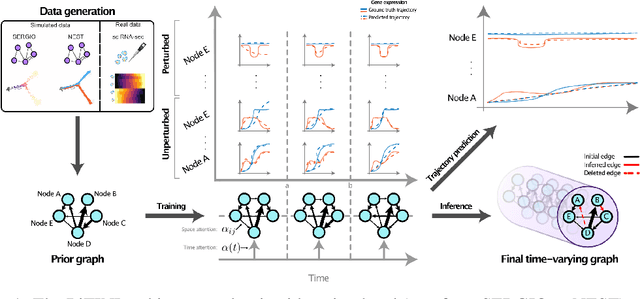
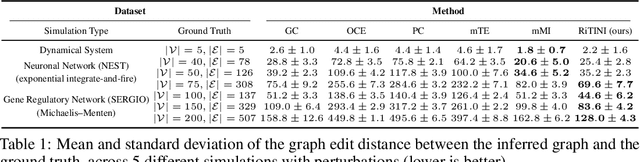
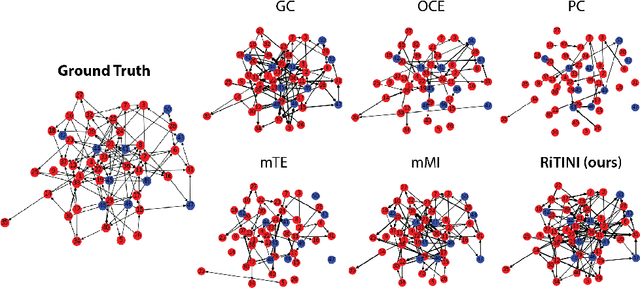
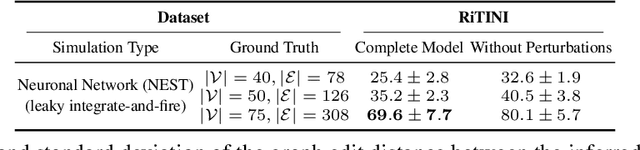
Complex systems are characterized by intricate interactions between entities that evolve dynamically over time. Accurate inference of these dynamic relationships is crucial for understanding and predicting system behavior. In this paper, we propose Regulatory Temporal Interaction Network Inference (RiTINI) for inferring time-varying interaction graphs in complex systems using a novel combination of space-and-time graph attentions and graph neural ordinary differential equations (ODEs). RiTINI leverages time-lapse signals on a graph prior, as well as perturbations of signals at various nodes in order to effectively capture the dynamics of the underlying system. This approach is distinct from traditional causal inference networks, which are limited to inferring acyclic and static graphs. In contrast, RiTINI can infer cyclic, directed, and time-varying graphs, providing a more comprehensive and accurate representation of complex systems. The graph attention mechanism in RiTINI allows the model to adaptively focus on the most relevant interactions in time and space, while the graph neural ODEs enable continuous-time modeling of the system's dynamics. We evaluate RiTINI's performance on various simulated and real-world datasets, demonstrating its state-of-the-art capability in inferring interaction graphs compared to previous methods.
Launch Power Optimization for Dynamic Elastic Optical Networks over C+L Bands
Aug 25, 2023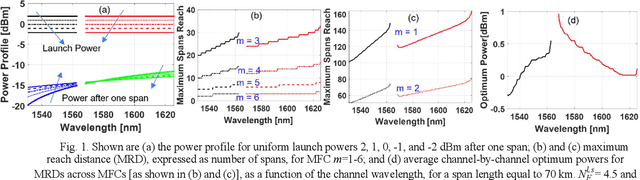


We propose an algorithm for calculating the optimum launch power over the entire C+L bands by maximizing the cumulative link GSNR of a channel plan built upon multiple modulation formats, with application to dynamic EONs. Exact last-fit spectrum assignment proves to outperform exact first-fit in terms of average GSNR at arrival time.