 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
A Consumer-tier based Visual-Brain Machine Interface for Augmented Reality Glasses Interactions
Aug 29, 2023
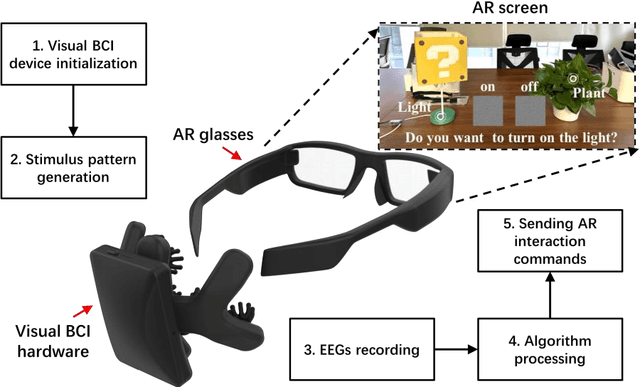
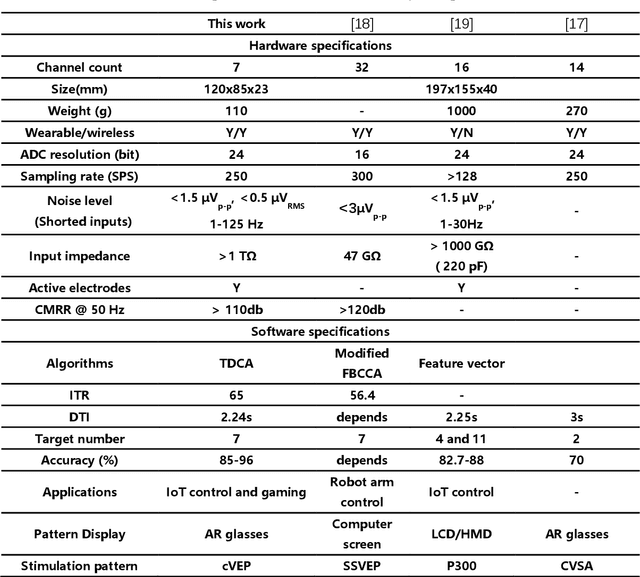
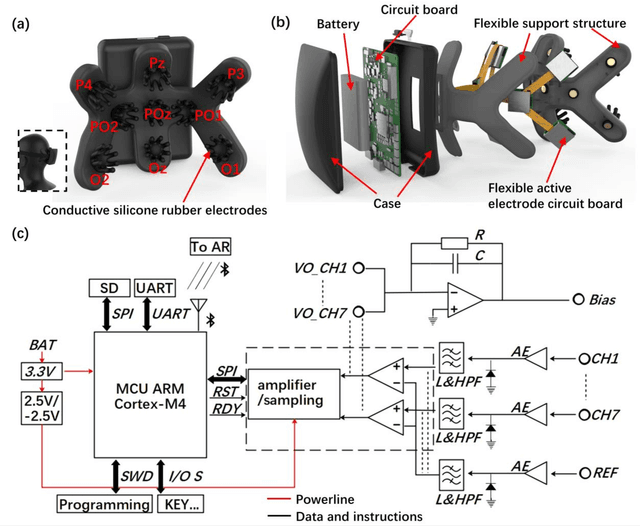
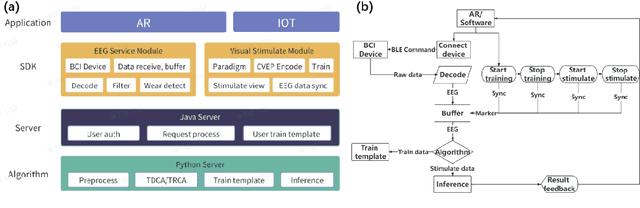
Objective.Visual-Brain Machine Interface(V-BMI) has provide a novel interaction technique for Augmented Reality (AR) industries. Several state-of-arts work has demonstates its high accuracy and real-time interaction capbilities. However, most of the studies employ EEGs devices that are rigid and difficult to apply in real-life AR glasseses application sceniraros. Here we develop a consumer-tier Visual-Brain Machine Inteface(V-BMI) system specialized for Augmented Reality(AR) glasses interactions. Approach. The developed system consists of a wearable hardware which takes advantages of fast set-up, reliable recording and comfortable wearable experience that specificized for AR glasses applications. Complementing this hardware, we have devised a software framework that facilitates real-time interactions within the system while accommodating a modular configuration to enhance scalability. Main results. The developed hardware is only 110g and 120x85x23 mm, which with 1 Tohm and peak to peak voltage is less than 1.5 uV, and a V-BMI based angry bird game and an Internet of Thing (IoT) AR applications are deisgned, we demonstrated such technology merits of intuitive experience and efficiency interaction. The real-time interaction accuracy is between 85 and 96 percentages in a commercial AR glasses (DTI is 2.24s and ITR 65 bits-min ). Significance. Our study indicates the developed system can provide an essential hardware-software framework for consumer based V-BMI AR glasses. Also, we derive several pivotal design factors for a consumer-grade V-BMI-based AR system: 1) Dynamic adaptation of stimulation patterns-classification methods via computer vision algorithms is necessary for AR glasses applications; and 2) Algorithmic localization to foster system stability and latency reduction.
Inverse Dynamics Trajectory Optimization for Contact-Implicit Model Predictive Control
Sep 04, 2023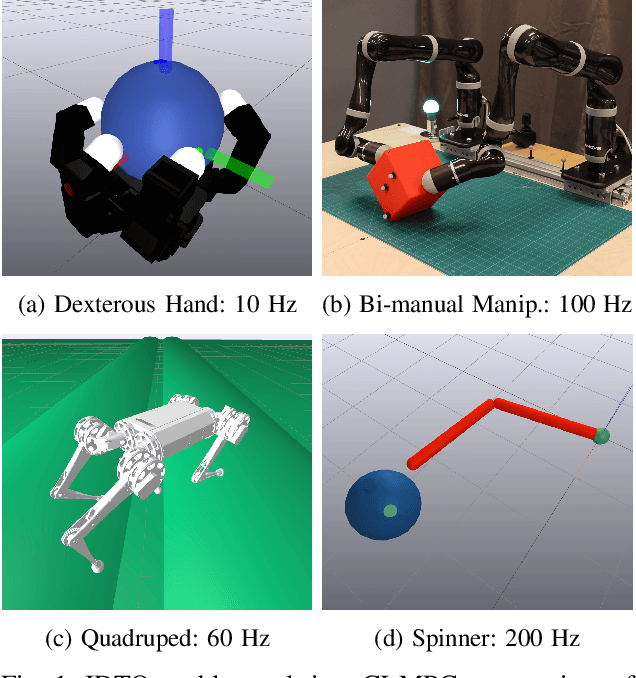
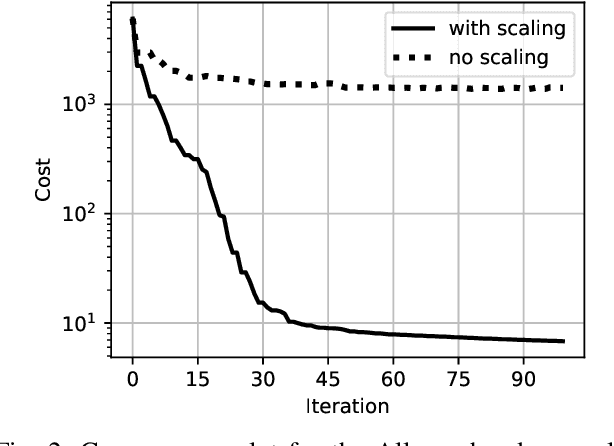
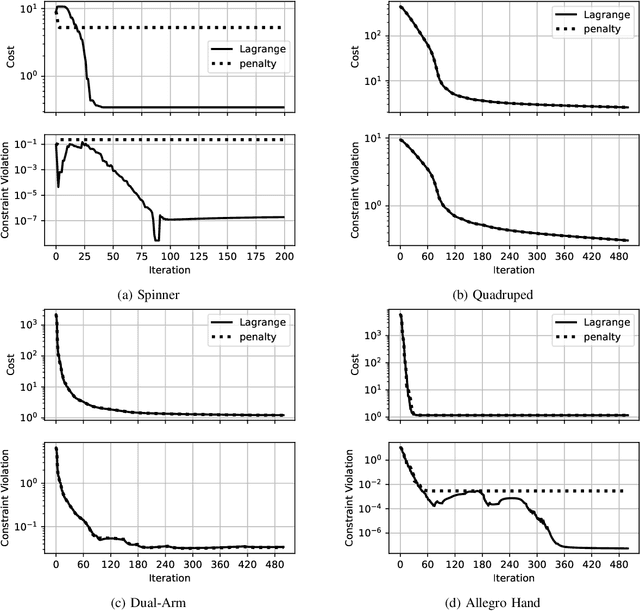
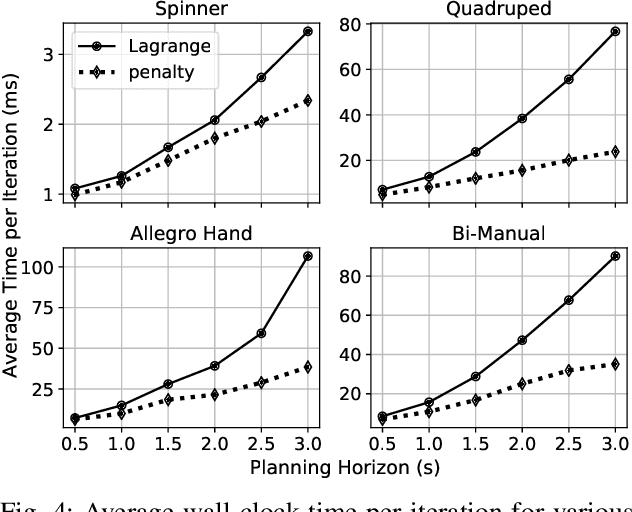
Robots must make and break contact to interact with the world and perform useful tasks. However, planning and control through contact remains a formidable challenge. In this work, we achieve real-time contact-implicit model predictive control with a surprisingly simple method: inverse dynamics trajectory optimization. While trajectory optimization with inverse dynamics is not new, we introduce a series of incremental innovations that collectively enable fast model predictive control on a variety of challenging manipulation and locomotion tasks. We implement these innovations in an open-source solver, and present a variety of simulation examples to support the effectiveness of the proposed approach. Additionally, we demonstrate contact-implicit model predictive control on hardware at over 100 Hz for a 20 degree-of-freedom bi-manual manipulation task.
Active flow control for three-dimensional cylinders through deep reinforcement learning
Sep 04, 2023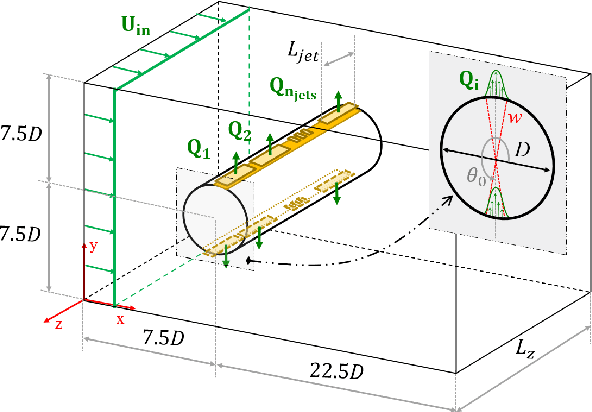
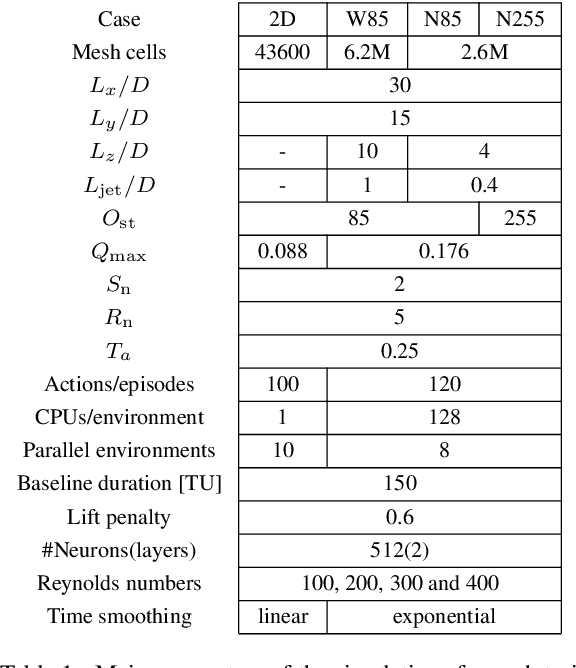
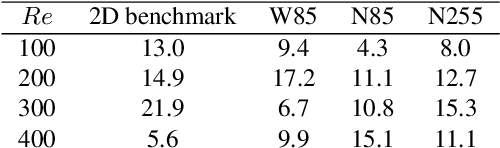
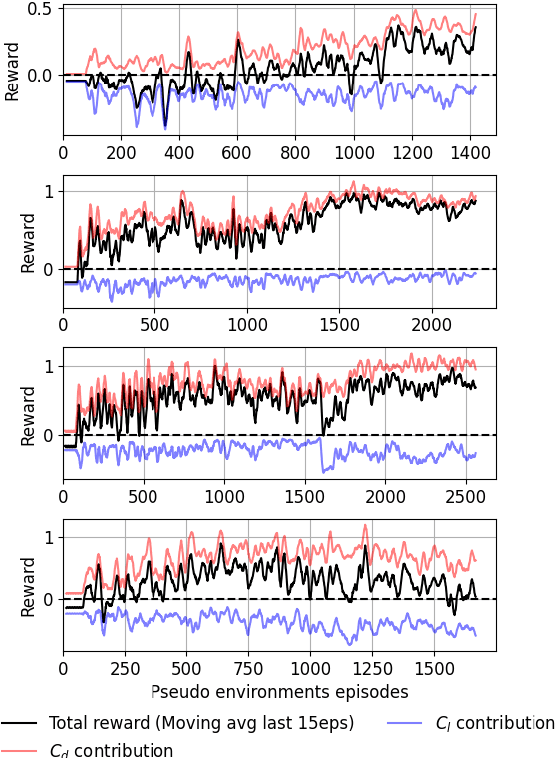
This paper presents for the first time successful results of active flow control with multiple independently controlled zero-net-mass-flux synthetic jets. The jets are placed on a three-dimensional cylinder along its span with the aim of reducing the drag coefficient. The method is based on a deep-reinforcement-learning framework that couples a computational-fluid-dynamics solver with an agent using the proximal-policy-optimization algorithm. We implement a multi-agent reinforcement-learning framework which offers numerous advantages: it exploits local invariants, makes the control adaptable to different geometries, facilitates transfer learning and cross-application of agents and results in significant training speedup. In this contribution we report significant drag reduction after applying the DRL-based control in three different configurations of the problem.
What Constitutes Good Contrastive Learning in Time-Series Forecasting?
Jun 21, 2023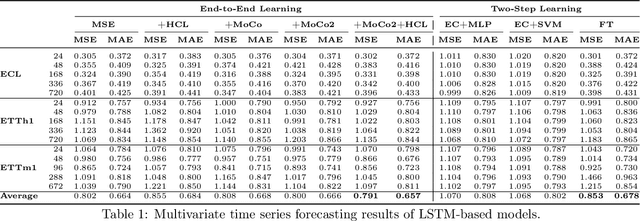
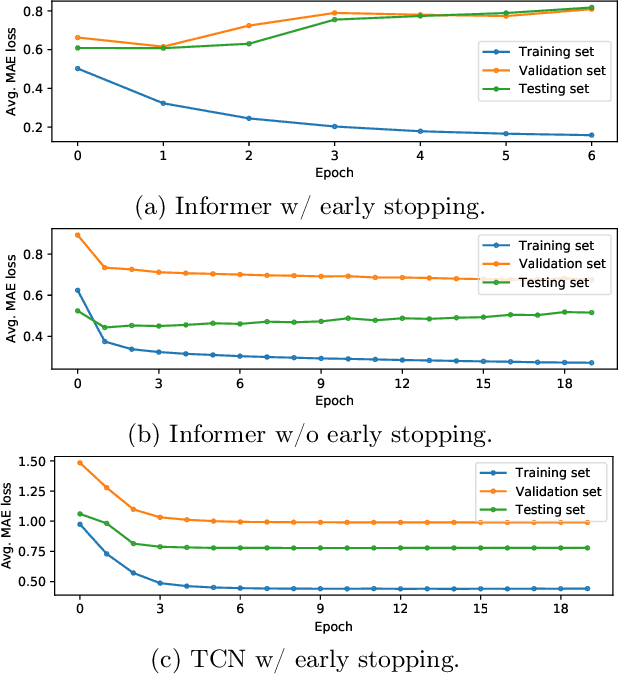
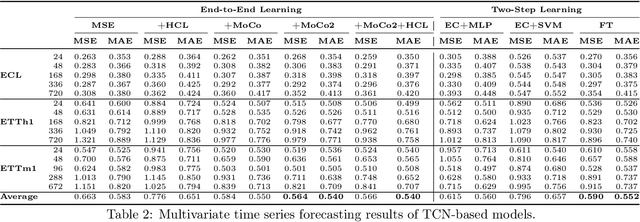
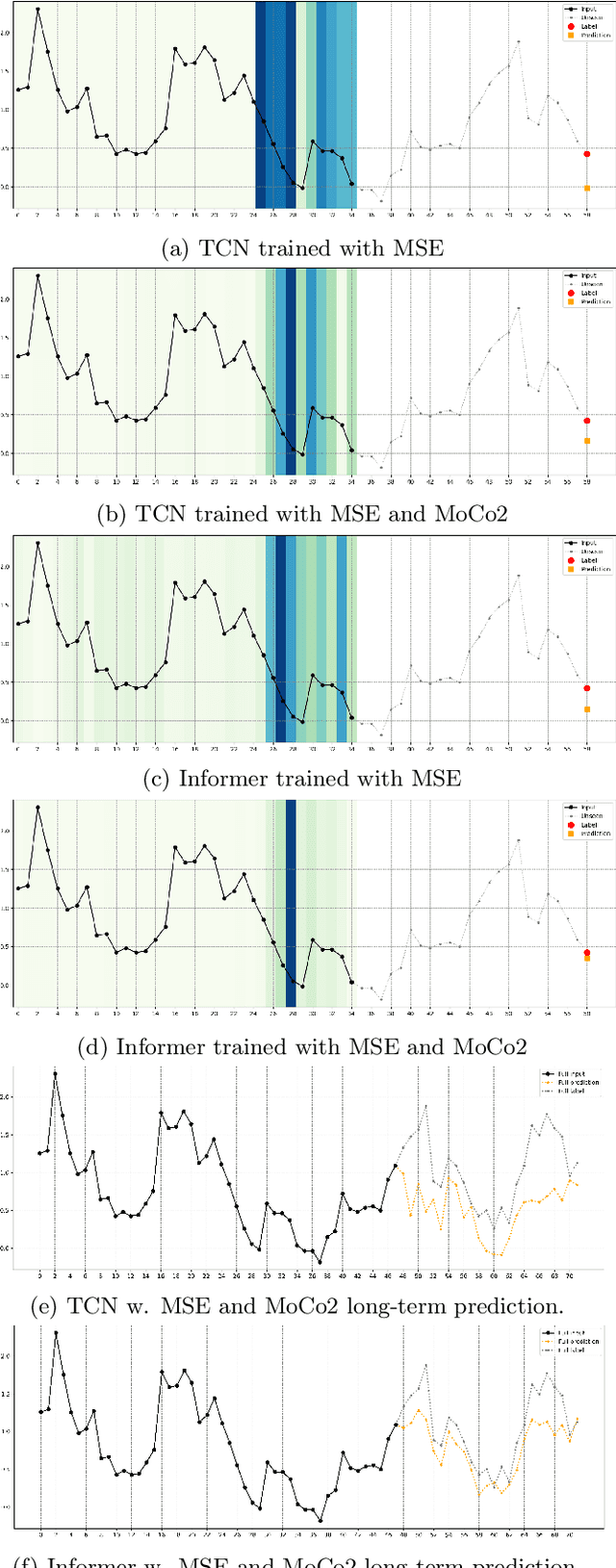
In recent years, the introduction of self-supervised contrastive learning (SSCL) has demonstrated remarkable improvements in representation learning across various domains, including natural language processing and computer vision. By leveraging the inherent benefits of self-supervision, SSCL enables the pre-training of representation models using vast amounts of unlabeled data. Despite these advances, there remains a significant gap in understanding the impact of different SSCL strategies on time series forecasting performance, as well as the specific benefits that SSCL can bring. This paper aims to address these gaps by conducting a comprehensive analysis of the effectiveness of various training variables, including different SSCL algorithms, learning strategies, model architectures, and their interplay. Additionally, to gain deeper insights into the improvements brought about by SSCL in the context of time-series forecasting, a qualitative analysis of the empirical receptive field is performed. Through our experiments, we demonstrate that the end-to-end training of a Transformer model using the Mean Squared Error (MSE) loss and SSCL emerges as the most effective approach in time series forecasting. Notably, the incorporation of the contrastive objective enables the model to prioritize more pertinent information for forecasting, such as scale and periodic relationships. These findings contribute to a better understanding of the benefits of SSCL in time series forecasting and provide valuable insights for future research in this area.
Demo: A Digital Twin of the 5G Radio Access Network for Anomaly Detection Functionality
Aug 30, 2023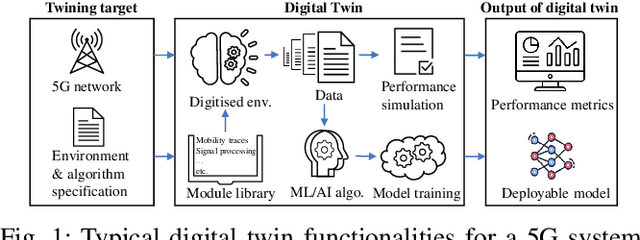
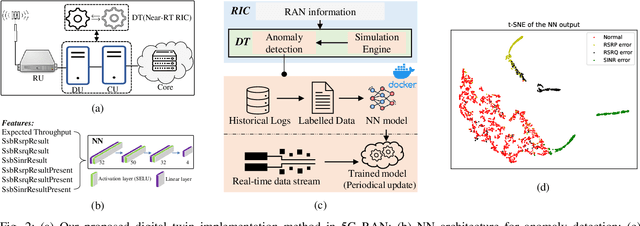
Recently, the concept of digital twins (DTs) has received significant attention within the realm of 5G/6G. This demonstration shows an innovative DT design and implementation framework tailored toward integration within the 5G infrastructure. The proposed DT enables near real-time anomaly detection capability pertaining to user connectivity. It empowers the 5G system to proactively execute decisions for resource control and connection restoration.
TrafficMCTS: A Closed-Loop Traffic Flow Generation Framework with Group-Based Monte Carlo Tree Search
Aug 31, 2023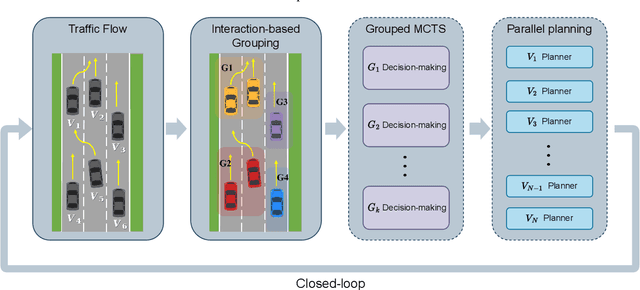


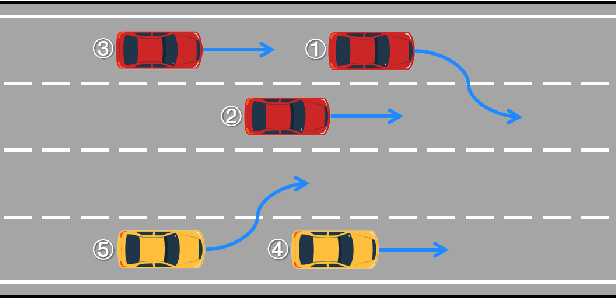
Digital twins for intelligent transportation systems are currently attracting great interests, in which generating realistic, diverse, and human-like traffic flow in simulations is a formidable challenge. Current approaches often hinge on predefined driver models, objective optimization, or reliance on pre-recorded driving datasets, imposing limitations on their scalability, versatility, and adaptability. In this paper, we introduce TrafficMCTS, an innovative framework that harnesses the synergy of groupbased Monte Carlo tree search (MCTS) and Social Value Orientation (SVO) to engender a multifaceted traffic flow replete with varying driving styles and cooperative tendencies. Anchored by a closed-loop architecture, our framework enables vehicles to dynamically adapt to their environment in real time, and ensure feasible collision-free trajectories. Through comprehensive comparisons with state-of-the-art methods, we illuminate the advantages of our approach in terms of computational efficiency, planning success rate, intent completion time, and diversity metrics. Besides, we simulate highway and roundabout scenarios to illustrate the effectiveness of the proposed framework and highlight its ability to induce diverse social behaviors within the traffic flow. Finally, we validate the scalability of TrafficMCTS by showcasing its prowess in simultaneously mass vehicles within a sprawling road network, cultivating a landscape of traffic flow that mirrors the intricacies of human behavior.
Search-time Efficient Device Constraints-Aware Neural Architecture Search
Jul 10, 2023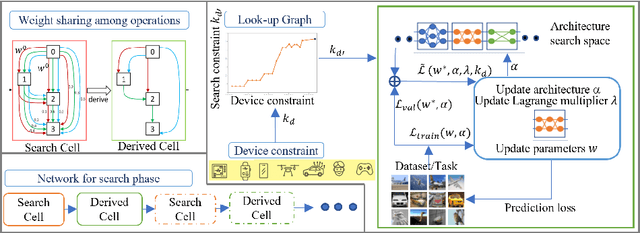
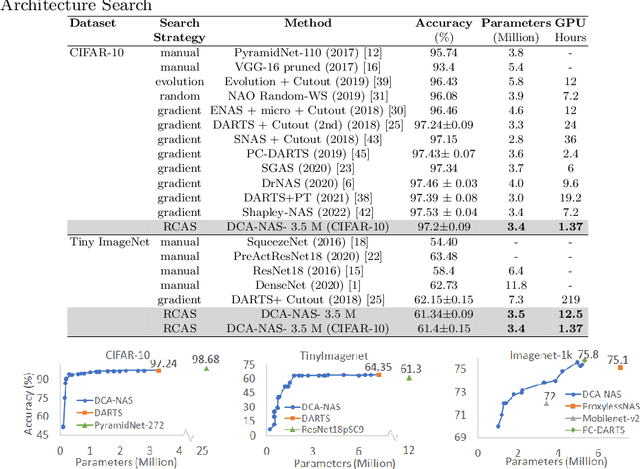
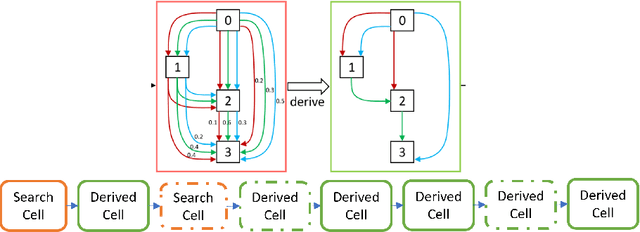
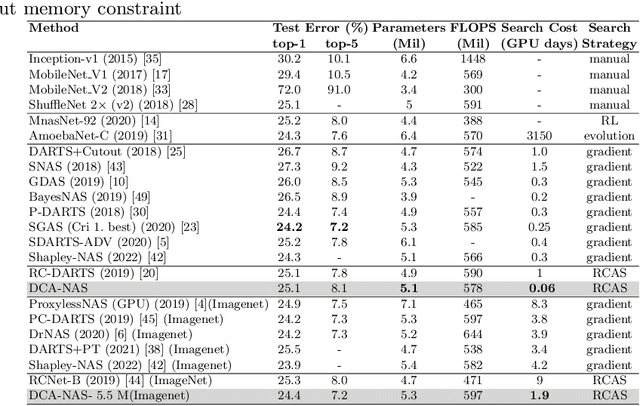
Edge computing aims to enable edge devices, such as IoT devices, to process data locally instead of relying on the cloud. However, deep learning techniques like computer vision and natural language processing can be computationally expensive and memory-intensive. Creating manual architectures specialized for each device is infeasible due to their varying memory and computational constraints. To address these concerns, we automate the construction of task-specific deep learning architectures optimized for device constraints through Neural Architecture Search (NAS). We present DCA-NAS, a principled method of fast neural network architecture search that incorporates edge-device constraints such as model size and floating-point operations. It incorporates weight sharing and channel bottleneck techniques to speed up the search time. Based on our experiments, we see that DCA-NAS outperforms manual architectures for similar sized models and is comparable to popular mobile architectures on various image classification datasets like CIFAR-10, CIFAR-100, and Imagenet-1k. Experiments with search spaces -- DARTS and NAS-Bench-201 show the generalization capabilities of DCA-NAS. On further evaluating our approach on Hardware-NAS-Bench, device-specific architectures with low inference latency and state-of-the-art performance were discovered.
Pressmatch: Automated journalist recommendation for media coverage with Nearest Neighbor search
Sep 02, 2023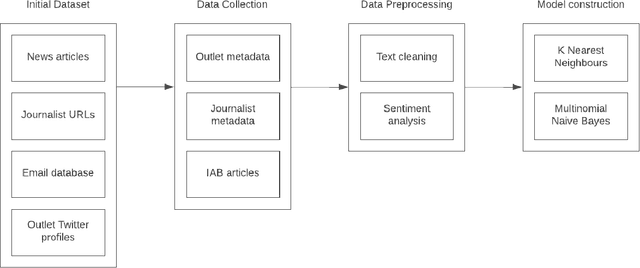
Slating a product for release often involves pitching journalists to run stories on your press release. Good media coverage often ensures greater product reach and drives audience engagement for those products. Hence, ensuring that those releases are pitched to the right journalists with relevant interests is crucial, since they receive several pitches daily. Keeping up with journalist beats and curating a media contacts list is often a huge and time-consuming task. This study proposes a model to automate and expedite the process by recommending suitable journalists to run media coverage on the press releases provided by the user.
Time-Varying Transition Matrices with Multi-task Gaussian Processes
Jun 20, 2023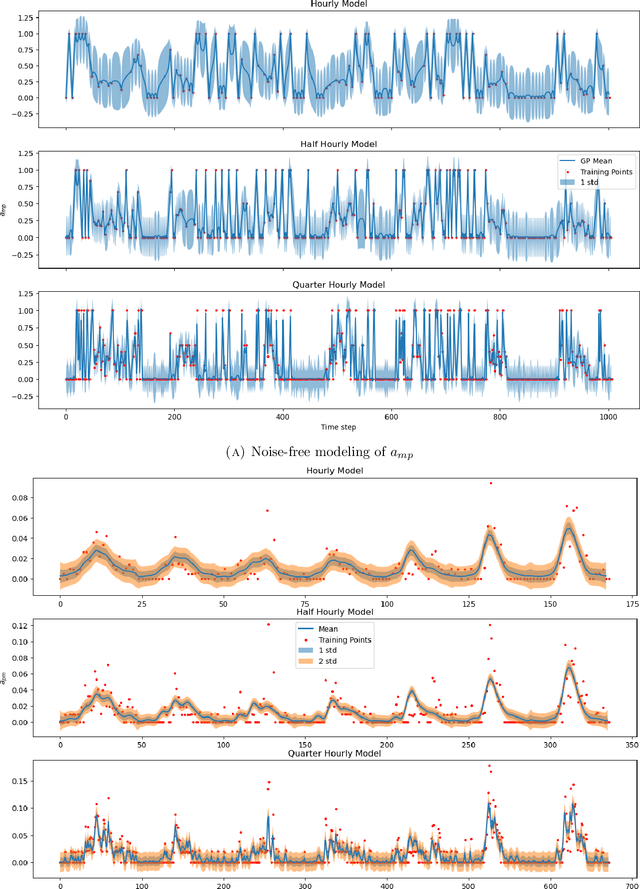
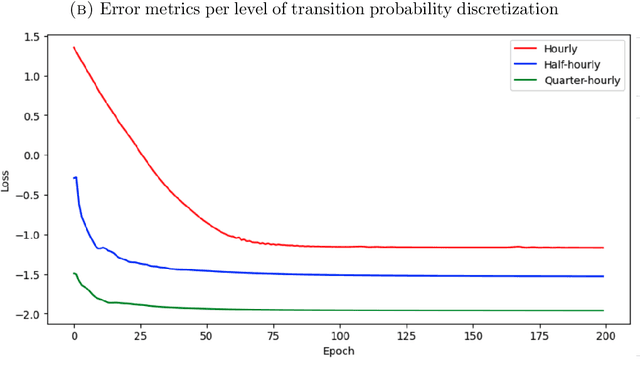
In this paper, we present a kernel-based, multi-task Gaussian Process (GP) model for approximating the underlying function of an individual's mobility state using a time-inhomogeneous Markov Process with two states: moves and pauses. Our approach accounts for the correlations between the transition probabilities by creating a covariance matrix over the tasks. We also introduce time-variability by assuming that an individual's transition probabilities vary over time in response to exogenous variables. We enforce the stochasticity and non-negativity constraints of probabilities in a Markov process through the incorporation of a set of constraint points in the GP. We also discuss opportunities to speed up GP estimation and inference in this context by exploiting Toeplitz and Kronecker product structures. Our numerical experiments demonstrate the ability of our formulation to enforce the desired constraints while learning the functional form of transition probabilities.
RoLA: A Real-Time Online Lightweight Anomaly Detection System for Multivariate Time Series
May 25, 2023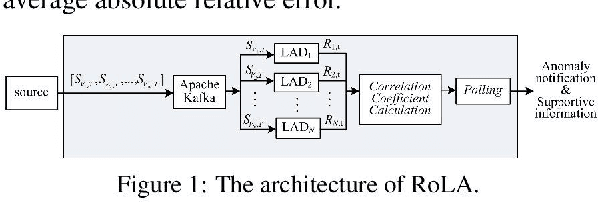

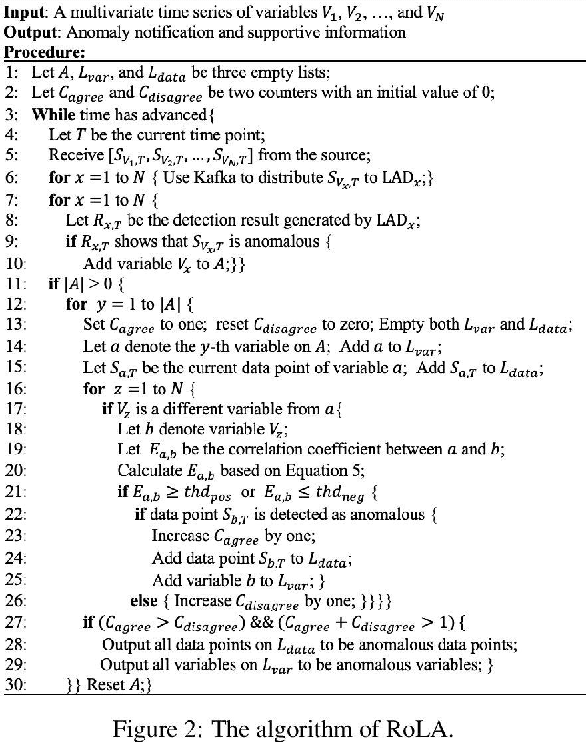
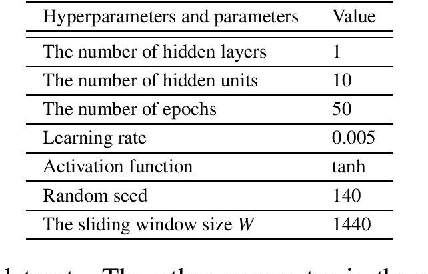
A multivariate time series refers to observations of two or more variables taken from a device or a system simultaneously over time. There is an increasing need to monitor multivariate time series and detect anomalies in real time to ensure proper system operation and good service quality. It is also highly desirable to have a lightweight anomaly detection system that considers correlations between different variables, adapts to changes in the pattern of the multivariate time series, offers immediate responses, and provides supportive information regarding detection results based on unsupervised learning and online model training. In the past decade, many multivariate time series anomaly detection approaches have been introduced. However, they are unable to offer all the above-mentioned features. In this paper, we propose RoLA, a real-time online lightweight anomaly detection system for multivariate time series based on a divide-and-conquer strategy, parallel processing, and the majority rule. RoLA employs multiple lightweight anomaly detectors to monitor multivariate time series in parallel, determine the correlations between variables dynamically on the fly, and then jointly detect anomalies based on the majority rule in real time. To demonstrate the performance of RoLA, we conducted an experiment based on a public dataset provided by the FerryBox of the One Ocean Expedition. The results show that RoLA provides satisfactory detection accuracy and lightweight performance.