 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Proximal Bellman mappings for reinforcement learning and their application to robust adaptive filtering
Sep 14, 2023
This paper aims at the algorithmic/theoretical core of reinforcement learning (RL) by introducing the novel class of proximal Bellman mappings. These mappings are defined in reproducing kernel Hilbert spaces (RKHSs), to benefit from the rich approximation properties and inner product of RKHSs, they are shown to belong to the powerful Hilbertian family of (firmly) nonexpansive mappings, regardless of the values of their discount factors, and possess ample degrees of design freedom to even reproduce attributes of the classical Bellman mappings and to pave the way for novel RL designs. An approximate policy-iteration scheme is built on the proposed class of mappings to solve the problem of selecting online, at every time instance, the "optimal" exponent $p$ in a $p$-norm loss to combat outliers in linear adaptive filtering, without training data and any knowledge on the statistical properties of the outliers. Numerical tests on synthetic data showcase the superior performance of the proposed framework over several non-RL and kernel-based RL schemes.
Kinship Verification from rPPG using 1DCNN Attention networks
Sep 14, 2023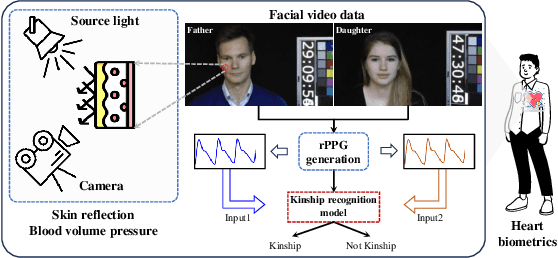

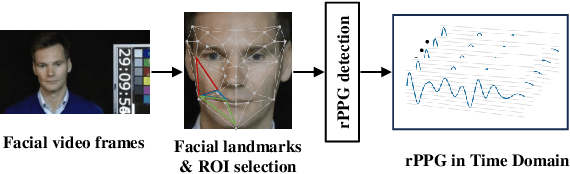
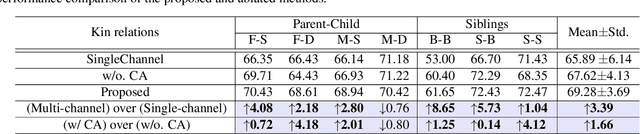
Facial kinship verification aims at automatically determining whether two subjects have a kinship relation. It has been widely studied from different modalities, such as faces, voices, gait, and smiling expressions. However, the potential of bio-signals, such as remote Photoplethysmography (rPPG) extracted from facial videos, remains largely unexplored in the kinship verification problem. In this paper, we investigate for the first time the usage of the rPPG signal for kinship verification. Specifically, we proposed a one-dimensional Convolutional Neural Network (1DCNN) with a 1DCNN-Attention module and contrastive loss to learn the kinship similarity from rPPGs. The network takes multiple rPPG signals extracted from various facial Regions of Interest (ROIs) as inputs. Additionally, the 1DCNN attention module is designed to learn and capture the discriminative kin features from feature embeddings. Finally, the proposed method is evaluated on the UvANEMO Smile Database from different kin relations, showing the usefulness of rPPG signals in verifying kinship.
Bipedal Walking on Constrained Footholds with MPC Footstep Control
Sep 14, 2023Bipedal robots promise the ability to traverse rough terrain quickly and efficiently, and indeed, humanoid robots can now use strong ankles and careful foot placement to traverse discontinuous terrain. However, more agile underactuated bipeds have small feet and weak ankles, and must constantly adjust their planned footstep position to maintain balance. We introduce a new model-predictive footstep controller which jointly optimizes over the robot's discrete choice of stepping surface, impending footstep position sequence, ankle torque in the sagittal plane, and center of mass trajectory, to track a velocity command. The controller is formulated as a single Mixed Integer Quadratic Program (MIQP) which is solved at 50-200 Hz, depending on terrain complexity. We implement a state of the art real-time elevation mapping and convex terrain decomposition framework to inform the controller of its surroundings in the form on convex polygons representing steppable terrain. We investigate the capabilities and challenges of our approach through hardware experiments on the underactuated biped Cassie.
Exploring the Correlation Between Ultrasound Speed and the State of Health of LiFePO$_4$ Prismatic Cells
Sep 13, 2023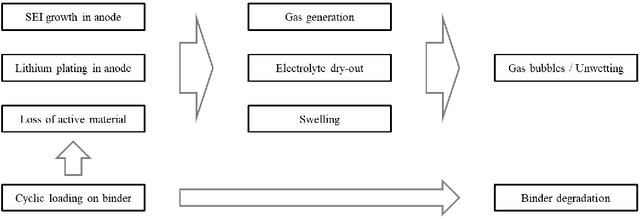
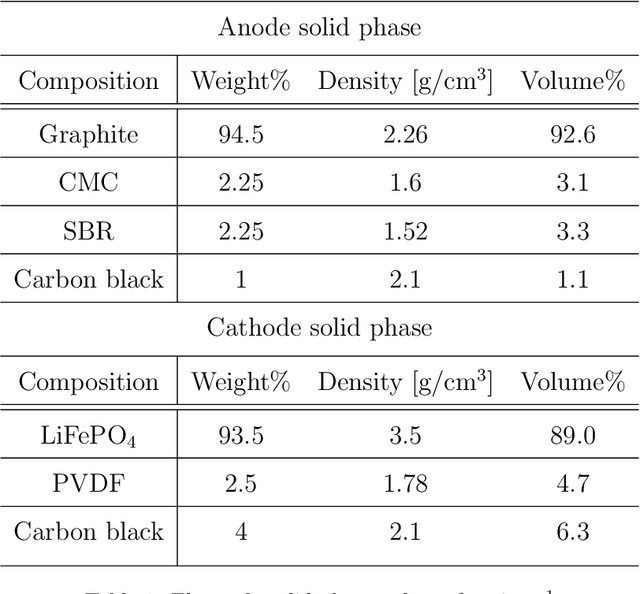
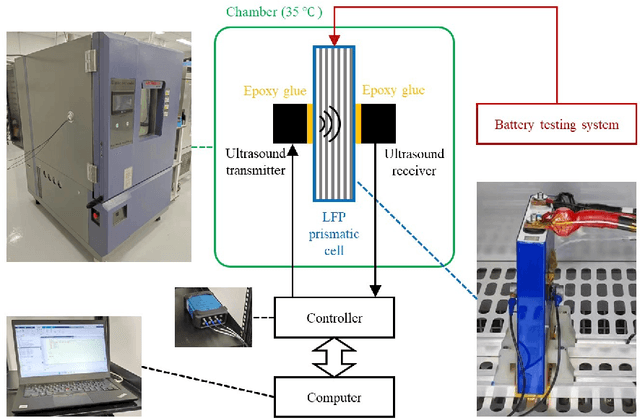
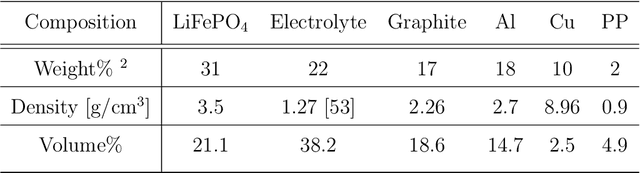
Electric vehicles (EVs) have become a popular mode of transportation, with their performance depending on the ageing of the Li-ion batteries used to power them. However, it can be challenging and time-consuming to determine the capacity retention of a battery in service. A rapid and reliable testing method for state of health (SoH) determination is desired. Ultrasonic testing techniques are promising due to their efficient, portable, and non-destructive features. In this study, we demonstrate that ultrasonic speed decreases with the degradation of the capacity of an LFP prismatic cell. We explain this correlation through numerical simulation, which describes wave propagation in porous media. We propose that the reduction of binder stiffness can be a primary cause of the change in ultrasonic speed during battery ageing. This work brings new insights into ultrasonic SoH estimation techniques.
Uncertainty-aware Gaussian Mixture Model for UWB Time Difference of Arrival Localization in Cluttered Environments
Jul 31, 2023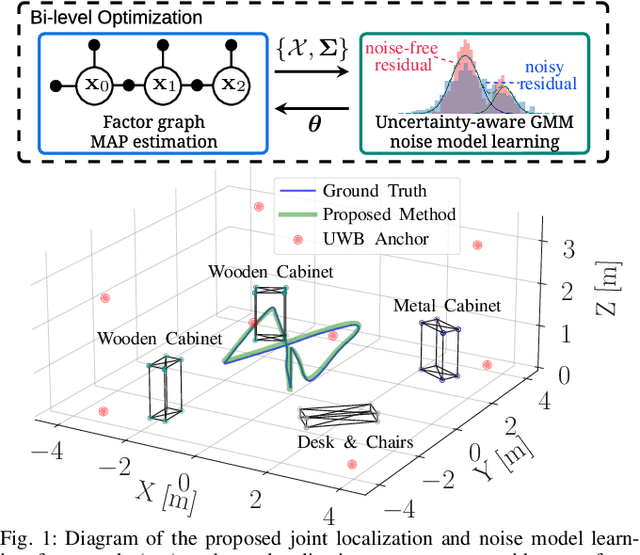
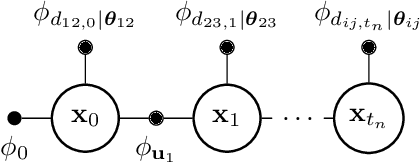
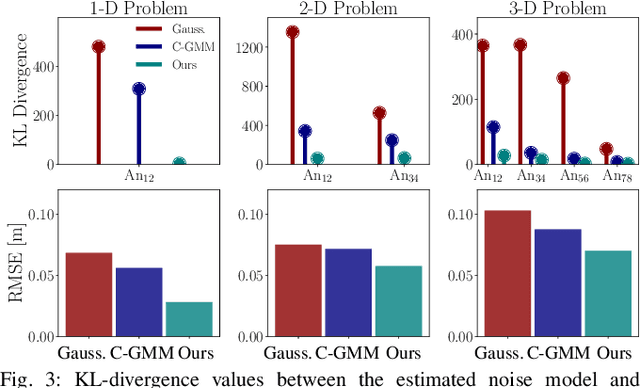
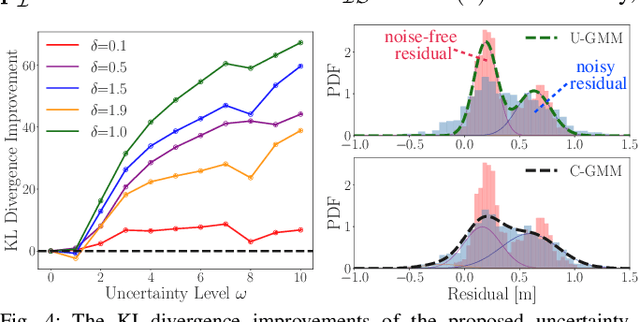
Ultra-wideband (UWB) time difference of arrival(TDOA)-based localization has emerged as a low-cost and scalable indoor positioning solution. However, in cluttered environments, the performance of UWB TDOA-based localization deteriorates due to the biased and non-Gaussian noise distributions induced by obstacles. In this work, we present a bi-level optimization-based joint localization and noise model learning algorithm to address this problem. In particular, we use a Gaussian mixture model (GMM) to approximate the measurement noise distribution. We explicitly incorporate the estimated state's uncertainty into the GMM noise model learning, referred to as uncertainty-aware GMM, to improve both noise modeling and localization performance. We first evaluate the GMM noise model learning and localization performance in numerous simulation scenarios. We then demonstrate the effectiveness of our algorithm in extensive real-world experiments using two different cluttered environments. We show that our algorithm provides accurate position estimates with low-cost UWB sensors, no prior knowledge about the obstacles in the space, and a significant amount of UWB radios occluded.
Wi-BFI: Extracting the IEEE 802.11 Beamforming Feedback Information from Commercial Wi-Fi Devices
Sep 08, 2023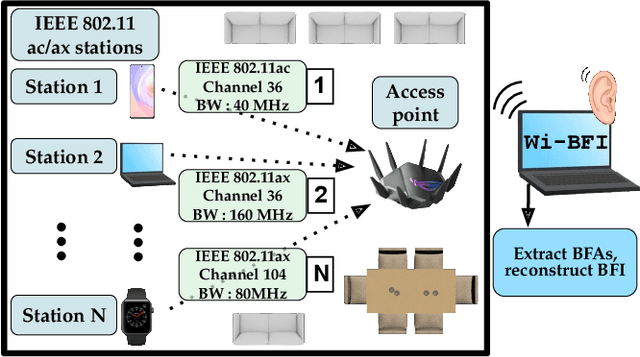
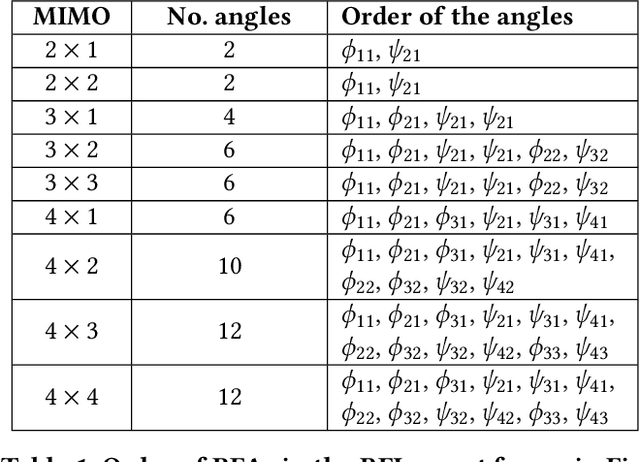
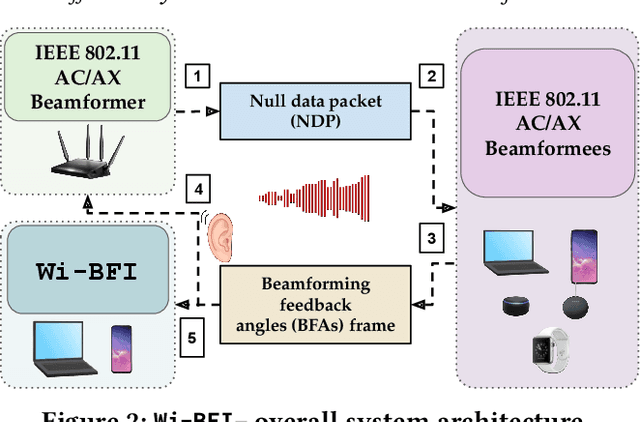
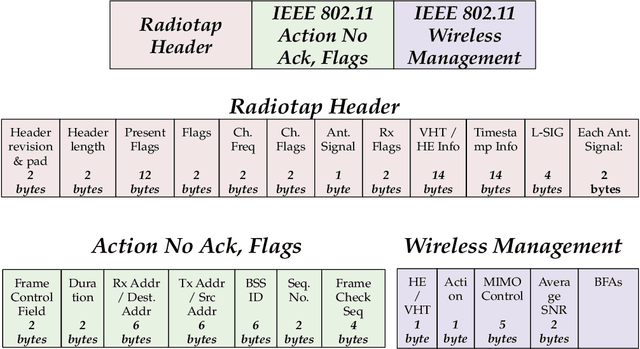
Recently, researchers have shown that the beamforming feedback angles (BFAs) used for Wi-Fi multiple-input multiple-output (MIMO) operations can be effectively leveraged as a proxy of the channel frequency response (CFR) for different purposes. Examples are passive human activity recognition and device fingerprinting. However, even though the BFAs report frames are sent in clear text, there is not yet a unified open-source tool to extract and decode the BFAs from the frames. To fill this gap, we developed Wi-BFI, the first tool that allows retrieving Wi-Fi BFAs and reconstructing the beamforming feedback information (BFI) - a compressed representation of the CFR - from the BFAs frames captured over the air. The tool supports BFAs extraction within both IEEE 802.11ac and 802.11ax networks operating on radio channels with 160/80/40/20 MHz bandwidth. Both multi-user and single-user MIMO feedback can be decoded through Wi-BFI. The tool supports real-time and offline extraction and storage of BFAs and BFI. The real-time mode also includes a visual representation of the channel state that continuously updates based on the collected data. Wi-BFI code is open source and the tool is also available as a pip package.
Generation of Time-Varying Impedance Attacks Against Haptic Shared Control Steering Systems
Jul 07, 2023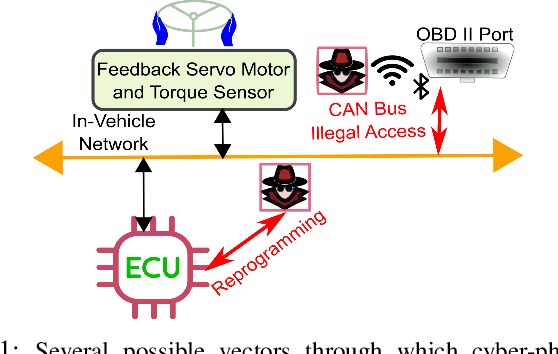
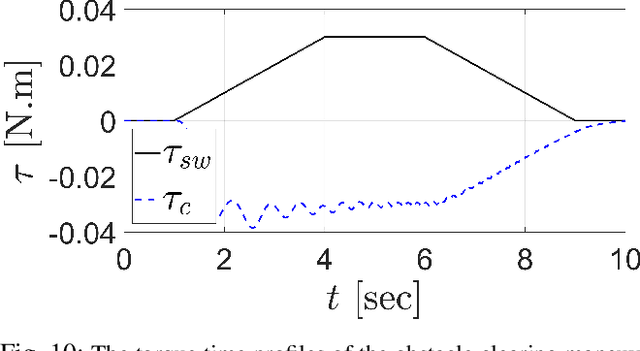
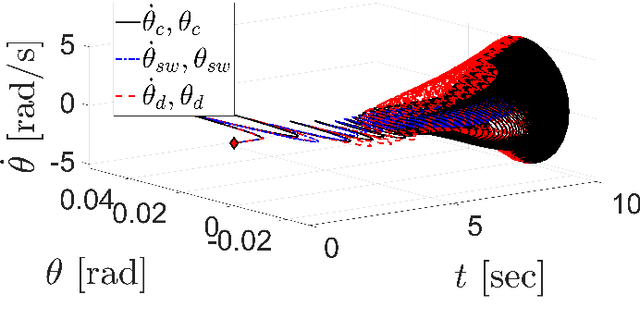
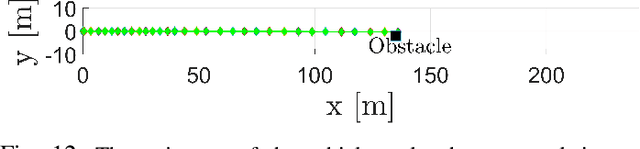
The safety-critical nature of vehicle steering is one of the main motivations for exploring the space of possible cyber-physical attacks against the steering systems of modern vehicles. This paper investigates the adversarial capabilities for destabilizing the interaction dynamics between human drivers and vehicle haptic shared control (HSC) steering systems. In contrast to the conventional robotics literature, where the main objective is to render the human-automation interaction dynamics stable by ensuring passivity, this paper takes the exact opposite route. In particular, to investigate the damaging capabilities of a successful cyber-physical attack, this paper demonstrates that an attacker who targets the HSC steering system can destabilize the interaction dynamics between the human driver and the vehicle HSC steering system through synthesis of time-varying impedance profiles. Specifically, it is shown that the adversary can utilize a properly designed non-passive and time-varying adversarial impedance target dynamics, which are fed with a linear combination of the human driver and the steering column torques. Using these target dynamics, it is possible for the adversary to generate in real-time a reference angular command for the driver input device and the directional control steering assembly of the vehicle. Furthermore, it is shown that the adversary can make the steering wheel and the vehicle steering column angular positions to follow the reference command generated by the time-varying impedance target dynamics using proper adaptive control strategies. Numerical simulations demonstrate the effectiveness of such time-varying impedance attacks, which result in a non-passive and inherently unstable interaction between the driver and the HSC steering system.
Sparse-firing regularization methods for spiking neural networks with time-to-first spike coding
Jul 24, 2023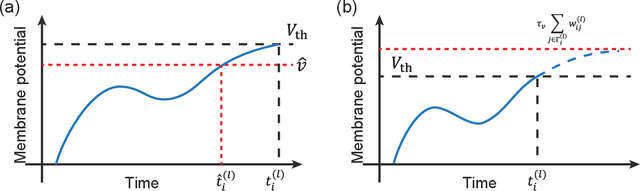
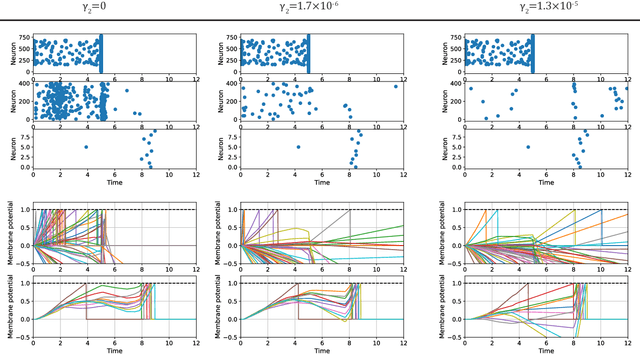
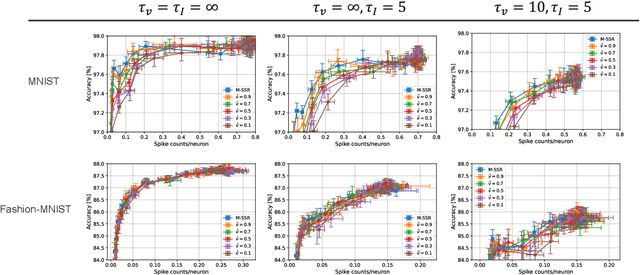
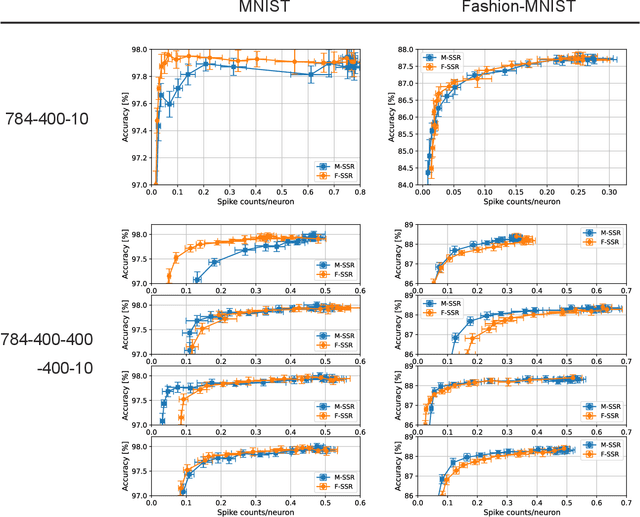
The training of multilayer spiking neural networks (SNNs) using the error backpropagation algorithm has made significant progress in recent years. Among the various training schemes, the error backpropagation method that directly uses the firing time of neurons has attracted considerable attention because it can realize ideal temporal coding. This method uses time-to-first spike (TTFS) coding, in which each neuron fires at most once, and this restriction on the number of firings enables information to be processed at a very low firing frequency. This low firing frequency increases the energy efficiency of information processing in SNNs, which is important not only because of its similarity with information processing in the brain, but also from an engineering point of view. However, only an upper limit has been provided for TTFS-coded SNNs, and the information-processing capability of SNNs at lower firing frequencies has not been fully investigated. In this paper, we propose two spike timing-based sparse-firing (SSR) regularization methods to further reduce the firing frequency of TTFS-coded SNNs. The first is the membrane potential-aware SSR (M-SSR) method, which has been derived as an extreme form of the loss function of the membrane potential value. The second is the firing condition-aware SSR (F-SSR) method, which is a regularization function obtained from the firing conditions. Both methods are characterized by the fact that they only require information about the firing timing and associated weights. The effects of these regularization methods were investigated on the MNIST, Fashion-MNIST, and CIFAR-10 datasets using multilayer perceptron networks and convolutional neural network structures.
Efficient Low-Rank GNN Defense Against Structural Attacks
Sep 18, 2023Graph Neural Networks (GNNs) have been shown to possess strong representation abilities over graph data. However, GNNs are vulnerable to adversarial attacks, and even minor perturbations to the graph structure can significantly degrade their performance. Existing methods either are ineffective against sophisticated attacks or require the optimization of dense adjacency matrices, which is time-consuming and prone to local minima. To remedy this problem, we propose an Efficient Low-Rank Graph Neural Network (ELR-GNN) defense method, which aims to learn low-rank and sparse graph structures for defending against adversarial attacks, ensuring effective defense with greater efficiency. Specifically, ELR-GNN consists of two modules: a Coarse Low-Rank Estimation Module and a Fine-Grained Estimation Module. The first module adopts the truncated Singular Value Decomposition (SVD) to initialize the low-rank adjacency matrix estimation, which serves as a starting point for optimizing the low-rank matrix. In the second module, the initial estimate is refined by jointly learning a low-rank sparse graph structure with the GNN model. Sparsity is incorporated into the learned low-rank adjacency matrix by pruning weak connections, which can reduce redundant data while maintaining valuable information. As a result, instead of using the dense adjacency matrix directly, ELR-GNN can learn a low-rank and sparse estimate of it in a simple, efficient and easy to optimize manner. The experimental results demonstrate that ELR-GNN outperforms the state-of-the-art GNN defense methods in the literature, in addition to being very efficient and easy to train.
Toward collision-free trajectory for autonomous and pilot-controlled unmanned aerial vehicles
Sep 18, 2023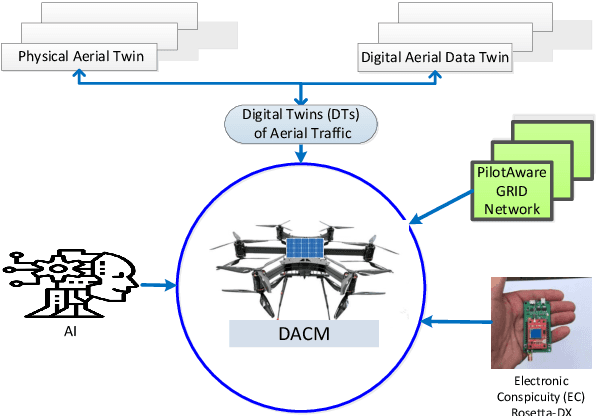
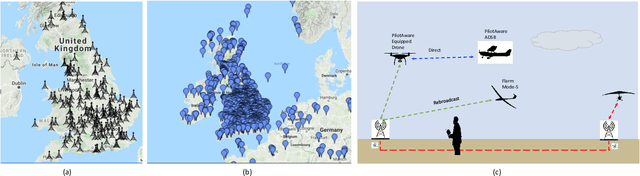
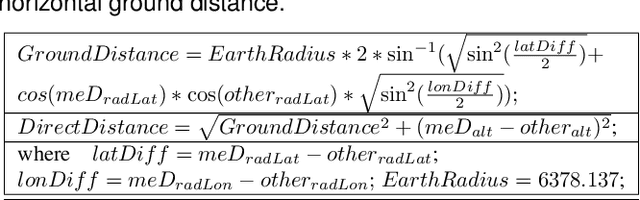
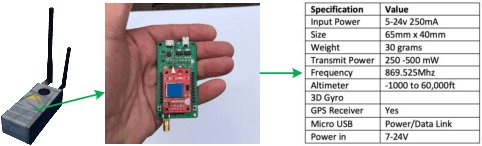
For drones, as safety-critical systems, there is an increasing need for onboard detect & avoid (DAA) technology i) to see, sense or detect conflicting traffic or imminent non-cooperative threats due to their high mobility with multiple degrees of freedom and the complexity of deployed unstructured environments, and subsequently ii) to take the appropriate actions to avoid collisions depending upon the level of autonomy. The safe and efficient integration of UAV traffic management (UTM) systems with air traffic management (ATM) systems, using intelligent autonomous approaches, is an emerging requirement where the number of diverse UAV applications is increasing on a large scale in dense air traffic environments for completing swarms of multiple complex missions flexibly and simultaneously. Significant progress over the past few years has been made in detecting UAVs present in aerospace, identifying them, and determining their existing flight path. This study makes greater use of electronic conspicuity (EC) information made available by PilotAware Ltd in developing an advanced collision management methodology -- Drone Aware Collision Management (DACM) -- capable of determining and executing a variety of time-optimal evasive collision avoidance (CA) manoeuvres using a reactive geometric conflict detection and resolution (CDR) technique. The merits of the DACM methodology have been demonstrated through extensive simulations and real-world field tests in avoiding mid-air collisions (MAC) between UAVs and manned aeroplanes. The results show that the proposed methodology can be employed successfully in avoiding collisions while limiting the deviation from the original trajectory in highly dynamic aerospace without requiring sophisticated sensors and prior training.