 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Motion Cueing Algorithm for Effective Motion Perception: A frequency-splitting MPC Approach
Sep 04, 2023
Model predictive control (MPC) is a promising technique for motion cueing in driving simulators, but its high computation time limits widespread real-time application. This paper proposes a hybrid algorithm that combines filter-based and MPC-based techniques to improve specific force tracking while reducing computation time. The proposed algorithm divides the reference acceleration into low-frequency and high-frequency components. The high-frequency component serves as a reference for translational motion to avoid workspace limit violations, while the low-frequency component is for tilt coordination. The total acceleration serves as a reference for combined specific force with the highest priority to enable compensation of deviations from its reference values. The algorithm uses constraints in the MPC formulation to account for workspace limits and workspace management is applied. The investigated scenarios were a step signal, a multi-sine wave and a recorded real-drive slalom maneuver. Based on the conducted simulations, the algorithm produces approximately 15% smaller root means squared error (RMSE) for the step signal compared to the state-of-the-art. Around 16% improvement is observed when the real-drive scenario is used as the simulation scenario, and for the multi-sine wave, 90% improvement is observed. At higher prediction horizons the algorithm matches the performance of a state-of-the-art MPC-based motion cueing algorithm. Finally, for all prediction horizons, the frequency-splitting algorithm produced faster results. The pre-generated references reduce the required prediction horizon and computational complexity while improving tracking performance. Hence, the proposed frequency-splitting algorithm outperforms state-of-the-art MPC-based algorithm and offers promise for real-time application in driving simulators.
Active Learning for Semantic Segmentation with Multi-class Label Query
Sep 17, 2023This paper proposes a new active learning method for semantic segmentation. The core of our method lies in a new annotation query design. It samples informative local image regions (e.g., superpixels), and for each of such regions, asks an oracle for a multi-hot vector indicating all classes existing in the region. This multi-class labeling strategy is substantially more efficient than existing ones like segmentation, polygon, and even dominant class labeling in terms of annotation time per click. However, it introduces the class ambiguity issue in training since it assigns partial labels (i.e., a set of candidate classes) to individual pixels. We thus propose a new algorithm for learning semantic segmentation while disambiguating the partial labels in two stages. In the first stage, it trains a segmentation model directly with the partial labels through two new loss functions motivated by partial label learning and multiple instance learning. In the second stage, it disambiguates the partial labels by generating pixel-wise pseudo labels, which are used for supervised learning of the model. Equipped with a new acquisition function dedicated to the multi-class labeling, our method outperformed previous work on Cityscapes and PASCAL VOC 2012 while spending less annotation cost.
Deep projection networks for learning time-homogeneous dynamical systems
Jul 19, 2023We consider the general class of time-homogeneous dynamical systems, both discrete and continuous, and study the problem of learning a meaningful representation of the state from observed data. This is instrumental for the task of learning a forward transfer operator of the system, that in turn can be used for forecasting future states or observables. The representation, typically parametrized via a neural network, is associated with a projection operator and is learned by optimizing an objective function akin to that of canonical correlation analysis (CCA). However, unlike CCA, our objective avoids matrix inversions and therefore is generally more stable and applicable to challenging scenarios. Our objective is a tight relaxation of CCA and we further enhance it by proposing two regularization schemes, one encouraging the orthogonality of the components of the representation while the other exploiting Chapman-Kolmogorov's equation. We apply our method to challenging discrete dynamical systems, discussing improvements over previous methods, as well as to continuous dynamical systems.
Towards a Safe Real-Time Motion Planning Framework for Autonomous Driving Systems: An MPPI Approach
Aug 03, 2023
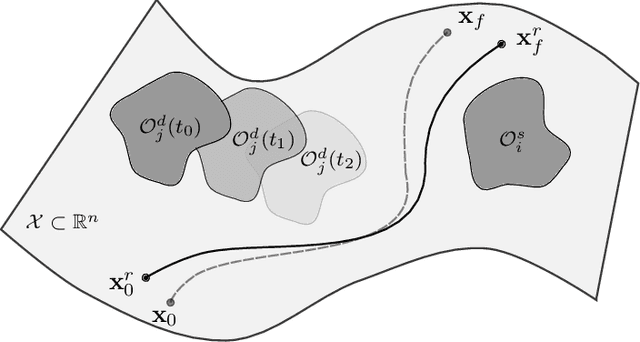
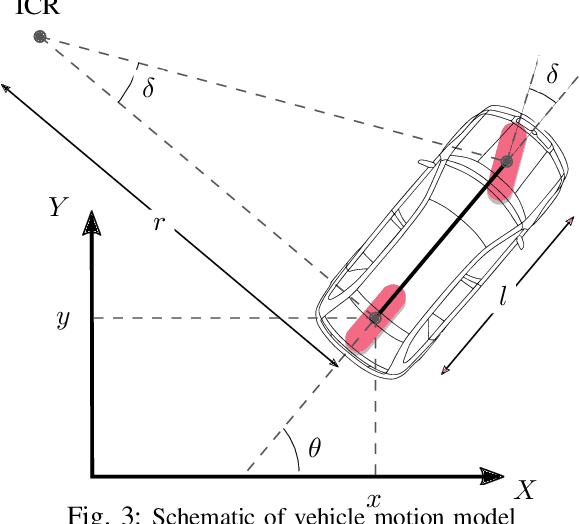
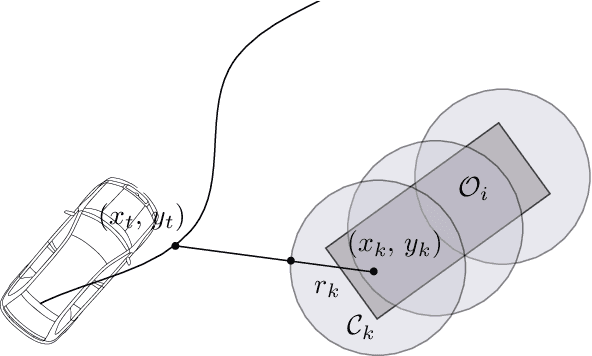
Planning safe trajectories in Autonomous Driving Systems (ADS) is a complex problem to solve in real-time. The main challenge to solve this problem arises from the various conditions and constraints imposed by road geometry, semantics and traffic rules, as well as the presence of dynamic agents. Recently, Model Predictive Path Integral (MPPI) has shown to be an effective framework for optimal motion planning and control in robot navigation in unstructured and highly uncertain environments. In this paper, we formulate the motion planning problem in ADS as a nonlinear stochastic dynamic optimization problem that can be solved using an MPPI strategy. The main technical contribution of this work is a method to handle obstacles within the MPPI formulation safely. In this method, obstacles are approximated by circles that can be easily integrated into the MPPI cost formulation while considering safety margins. The proposed MPPI framework has been efficiently implemented in our autonomous vehicle and experimentally validated using three different primitive scenarios. Experimental results show that generated trajectories are safe, feasible and perfectly achieve the planning objective. The video results as well as the open-source implementation are available at: https://gitlab.uni.lu/360lab-public/mppi
Ensemble-based modeling abstractions for modern self-optimizing systems
Sep 11, 2023In this paper, we extend our ensemble-based component model DEECo with the capability to use machine-learning and optimization heuristics in establishing and reconfiguration of autonomic component ensembles. We show how to capture these concepts on the model level and give an example of how such a model can be beneficially used for modeling access-control related problem in the Industry 4.0 settings. We argue that incorporating machine-learning and optimization heuristics is a key feature for modern smart systems which are to learn over the time and optimize their behavior at runtime to deal with uncertainty in their environment.
Multi-agent Collective Construction using 3D Decomposition
Sep 02, 2023This paper addresses a Multi-Agent Collective Construction (MACC) problem that aims to build a three-dimensional structure comprised of cubic blocks. We use cube-shaped robots that can carry one cubic block at a time, and move forward, reverse, left, and right to an adjacent cell of the same height or climb up and down one cube height. To construct structures taller than one cube, the robots must build supporting stairs made of blocks and remove the stairs once the structure is built. Conventional techniques solve for the entire structure at once and quickly become intractable for larger workspaces and complex structures, especially in a multi-agent setting. To this end, we present a decomposition algorithm that computes valid substructures based on intrinsic structural dependencies. We use Mixed Integer Linear Programming (MILP) to solve for each of these substructures and then aggregate the solutions to construct the entire structure. Extensive testing on 200 randomly generated structures shows an order of magnitude improvement in the solution computation time compared to an MILP approach without decomposition. Additionally, compared to Reinforcement Learning (RL) based and heuristics-based approaches drawn from the literature, our solution indicates orders of magnitude improvement in the number of pick-up and drop-off actions required to construct a structure. Furthermore, we leverage the independence between substructures to detect which sub-structures can be built in parallel. With this parallelization technique, we illustrate a further improvement in the number of time steps required to complete building the structure. This work is a step towards applying multi-agent collective construction for real-world structures by significantly reducing solution computation time with a bounded increase in the number of time steps required to build the structure.
Evaluating the Ebb and Flow: An In-depth Analysis of Question-Answering Trends across Diverse Platforms
Sep 12, 2023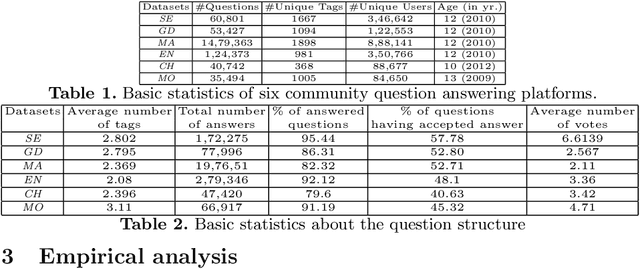
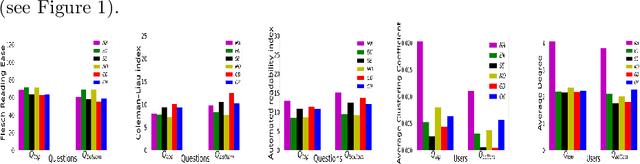


Community Question Answering (CQA) platforms steadily gain popularity as they provide users with fast responses to their queries. The swiftness of these responses is contingent on a mixture of query-specific and user-related elements. This paper scrutinizes these contributing factors within the context of six highly popular CQA platforms, identified through their standout answering speed. Our investigation reveals a correlation between the time taken to yield the first response to a question and several variables: the metadata, the formulation of the questions, and the level of interaction among users. Additionally, by employing conventional machine learning models to analyze these metadata and patterns of user interaction, we endeavor to predict which queries will receive their initial responses promptly.
On the Local Quadratic Stability of T-S Fuzzy Systems in the Vicinity of the Origin
Sep 14, 2023The main goal of this paper is to introduce new local stability conditions for continuous-time Takagi-Sugeno (T-S) fuzzy systems. These stability conditions are based on linear matrix inequalities (LMIs) in combination with quadratic Lyapunov functions. Moreover, they integrate information on the membership functions at the origin and effectively leverage the linear structure of the underlying nonlinear system in the vicinity of the origin. As a result, the proposed conditions are proved to be less conservative compared to existing methods using fuzzy Lyapunov functions in the literature. Moreover, we establish that the proposed methods offer necessary and sufficient conditions for the local exponential stability of T-S fuzzy systems. The paper also includes discussions on the inherent limitations associated with fuzzy Lyapunov approaches. To demonstrate the theoretical results, we provide comprehensive examples that elucidate the core concepts and validate the efficacy of the proposed conditions.
Asynchronous Spatial Allocation Protocol for Trajectory Planning of Heterogeneous Multi-Agent Systems
Sep 14, 2023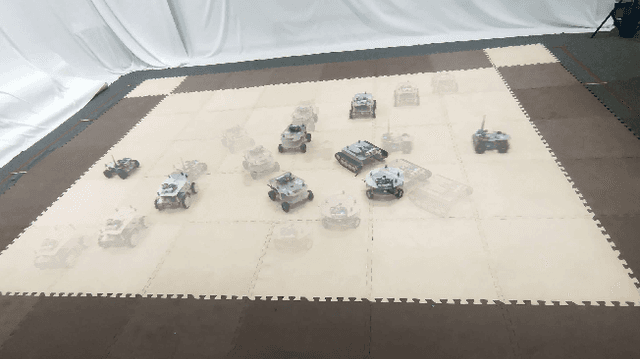

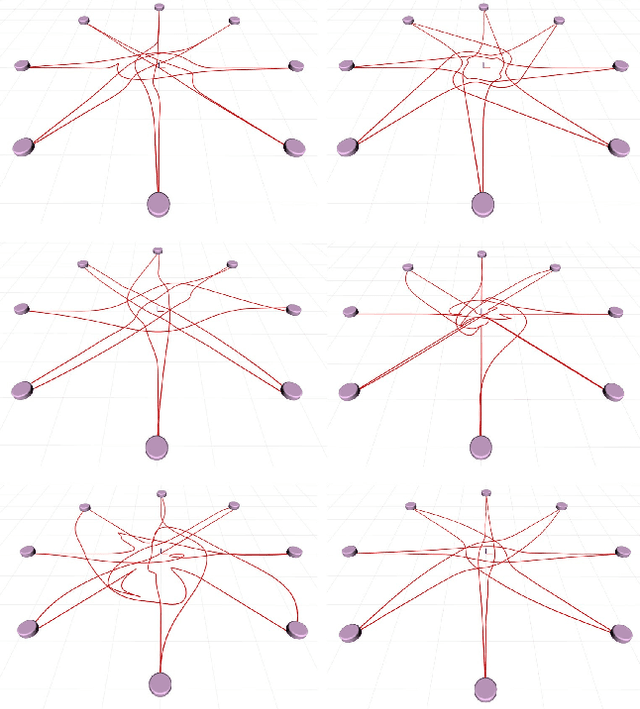
To plan the trajectories of a large and heterogeneous swarm, sequential or synchronous distributed methods usually become intractable, due to the lack of global connectivity and clock synchronization, Moreover, the existing asynchronously distributed schemes usually require recheck-like mechanisms instead of inherently considering the other' moving tendency. To this end, we propose a novel asynchronous protocol to allocate the agents' derivable space in a distributed way, by which each agent can replan trajectory depending on its own timetable. Properties such as collision avoidance and recursive feasibility are theoretically shown and a lower bound of protocol updating is provided. Comprehensive simulations and comparisons with five state-of-the-art methods validate the effectiveness of our method and illustrate the improvement in both the completion time and the moving distance. Finally, hardware experiments are carried out, where 8 heterogeneous unmanned ground vehicles with onboard computation navigate in cluttered scenarios at a high agility.
Multi-fidelity reduced-order surrogate modeling
Sep 01, 2023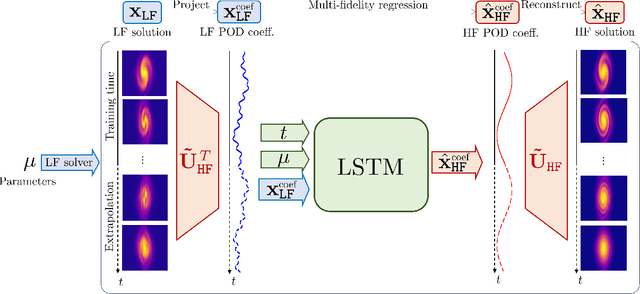

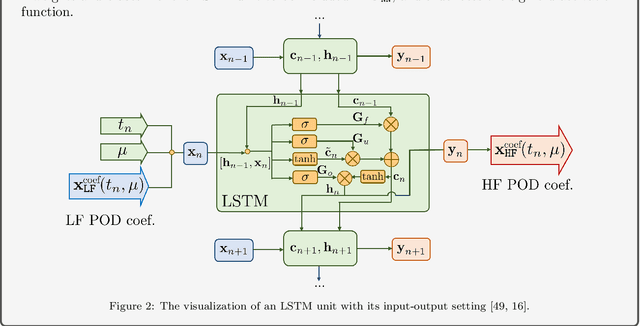

High-fidelity numerical simulations of partial differential equations (PDEs) given a restricted computational budget can significantly limit the number of parameter configurations considered and/or time window evaluated for modeling a given system. Multi-fidelity surrogate modeling aims to leverage less accurate, lower-fidelity models that are computationally inexpensive in order to enhance predictive accuracy when high-fidelity data are limited or scarce. However, low-fidelity models, while often displaying important qualitative spatio-temporal features, fail to accurately capture the onset of instability and critical transients observed in the high-fidelity models, making them impractical as surrogate models. To address this shortcoming, we present a new data-driven strategy that combines dimensionality reduction with multi-fidelity neural network surrogates. The key idea is to generate a spatial basis by applying the classical proper orthogonal decomposition (POD) to high-fidelity solution snapshots, and approximate the dynamics of the reduced states - time-parameter-dependent expansion coefficients of the POD basis - using a multi-fidelity long-short term memory (LSTM) network. By mapping low-fidelity reduced states to their high-fidelity counterpart, the proposed reduced-order surrogate model enables the efficient recovery of full solution fields over time and parameter variations in a non-intrusive manner. The generality and robustness of this method is demonstrated by a collection of parametrized, time-dependent PDE problems where the low-fidelity model can be defined by coarser meshes and/or time stepping, as well as by misspecified physical features. Importantly, the onset of instabilities and transients are well captured by this surrogate modeling technique.