 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Performance Analysis of OTSM under Hardware Impairments in Millimeter-Wave Vehicular Communication Networks
Sep 08, 2023
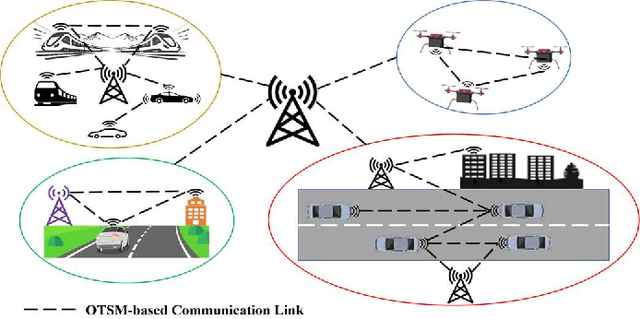
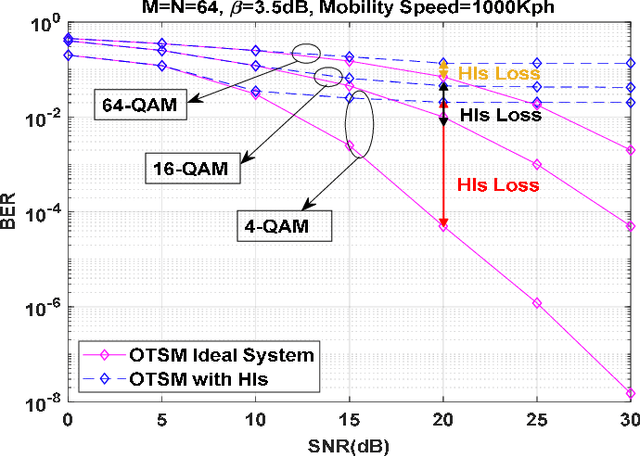
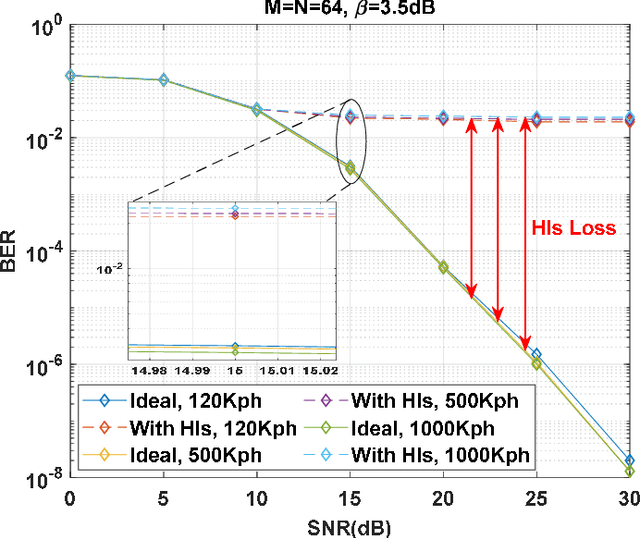
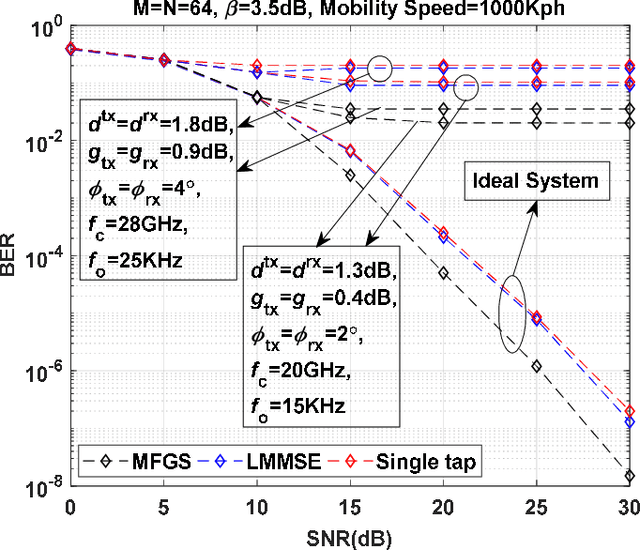
Orthogonal time sequency multiplexing (OTSM) has been recently proposed as a single-carrier (SC) waveform offering similar bit error rate (BER) to multi-carrier orthogonal time frequency space (OTFS) modulation in doubly-spread channels under high mobilities; however, with much lower complexity making OTSM a promising candidate for low-power millimeter-wave (mmWave) vehicular communications in 6G wireless networks. In this paper, the performance of OTSM-based homodyne transceiver is explored under hardware impairments (HIs) including in-phase and quadrature imbalance (IQI), direct current offset (DCO), phase noise, power amplifier non-linearity, carrier frequency offset, and synchronization timing offset. First, the discrete-time baseband signal model is obtained in vector form under the mentioned HIs. Then, the system input-output relations are derived in time, delay-time, and delay-sequency (DS) domains in which the parameters of HIs are incorporated. Analytical studies demonstrate that noise stays white Gaussian and effective channel matrix is sparse in the DS domain under HIs. Also, DCO appears as a DC signal at receiver interfering with only the zero sequency over all delay taps in the DS domain; however, IQI redounds to self-conjugated fully-overlapping sequency interference. Simulation results reveal the fact that with no HI compensation (HIC), not only OTSM outperforms plain SC waveform but it performs close to uncompensated OTFS system; however, HIC is essentially needed for OTSM systems operating in mmWave and beyond frequency bands.
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Jul 29, 2023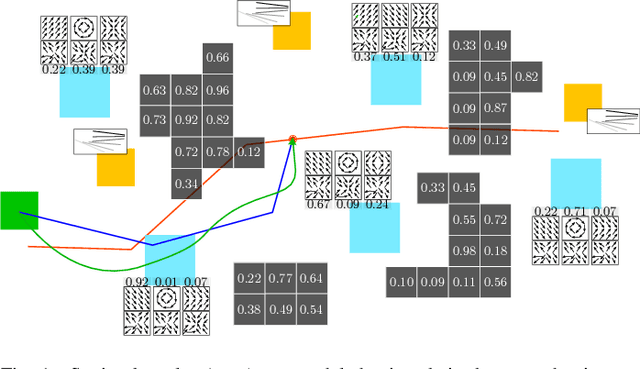
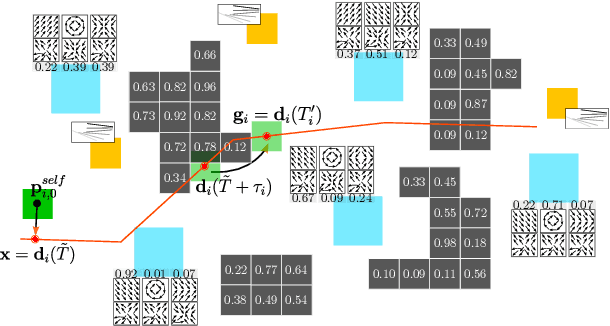
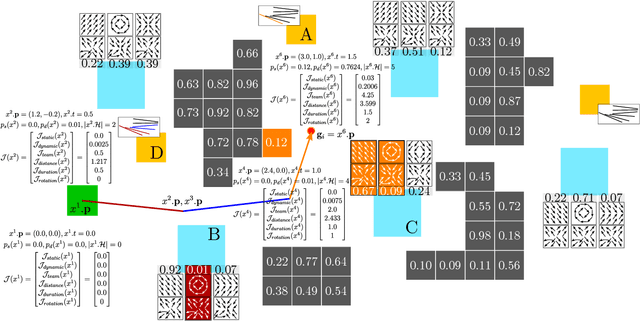
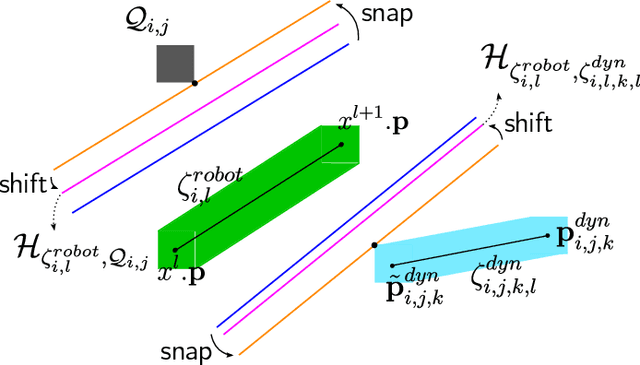
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision and static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles during decision-making, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
The Optimized path for the public transportation of Incheon in South Korea
Sep 18, 2023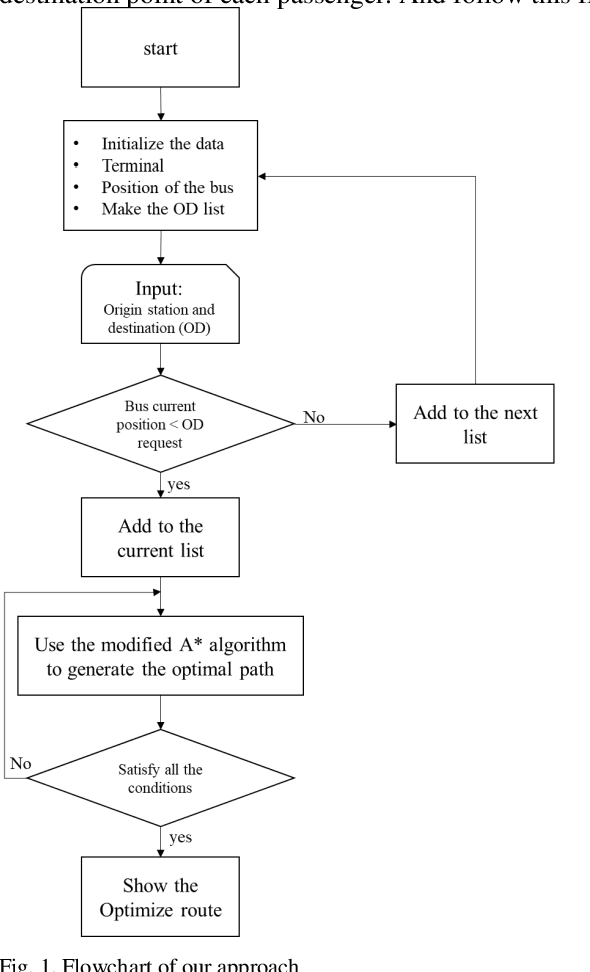
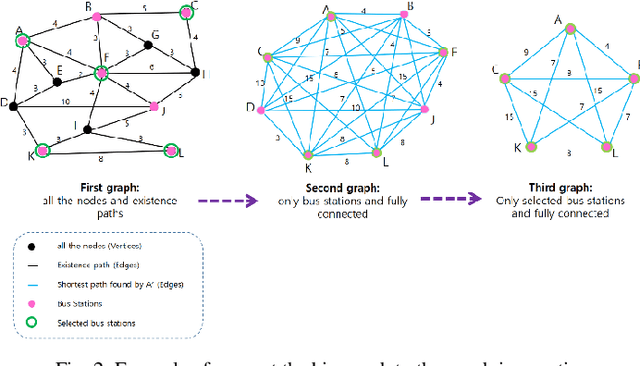
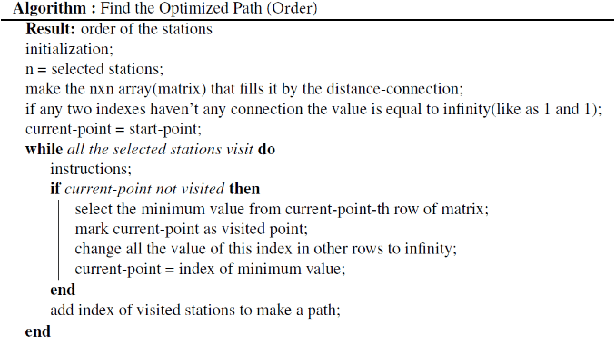
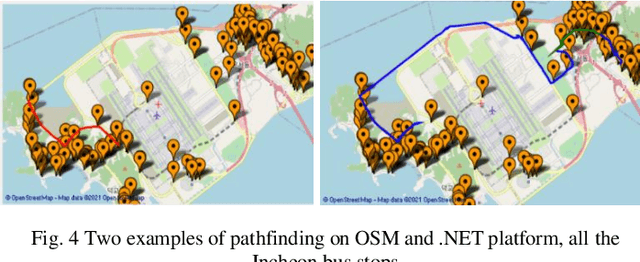
Path-finding is one of the most popular subjects in the field of computer science. Pathfinding strategies determine a path from a given coordinate to another. The focus of this paper is on finding the optimal path for the bus transportation system based on passenger demand. This study is based on bus stations in Incheon, South Korea, and we show that our modified A* algorithm performs better than other basic pathfinding algorithms such as the Genetic and Dijkstra. Our proposed approach can find the shortest path in real-time even for large amounts of data(points).
On the Real-Time Semantic Segmentation of Aphid Clusters in the Wild
Jul 17, 2023
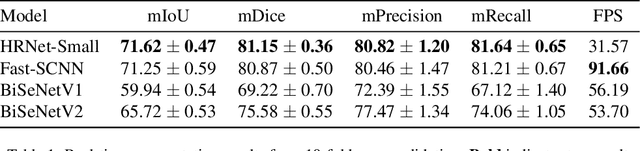
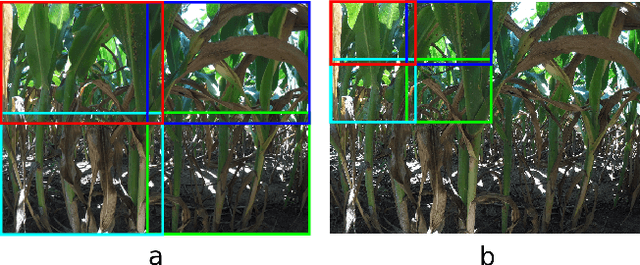
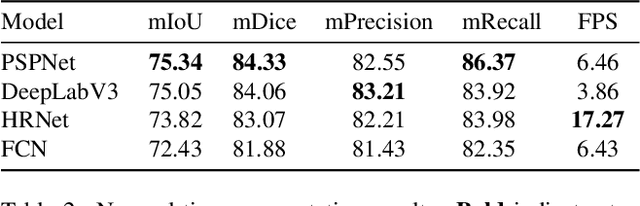
Aphid infestations can cause extensive damage to wheat and sorghum fields and spread plant viruses, resulting in significant yield losses in agriculture. To address this issue, farmers often rely on chemical pesticides, which are inefficiently applied over large areas of fields. As a result, a considerable amount of pesticide is wasted on areas without pests, while inadequate amounts are applied to areas with severe infestations. The paper focuses on the urgent need for an intelligent autonomous system that can locate and spray infestations within complex crop canopies, reducing pesticide use and environmental impact. We have collected and labeled a large aphid image dataset in the field, and propose the use of real-time semantic segmentation models to segment clusters of aphids. A multiscale dataset is generated to allow for learning the clusters at different scales. We compare the segmentation speeds and accuracy of four state-of-the-art real-time semantic segmentation models on the aphid cluster dataset, benchmarking them against nonreal-time models. The study results show the effectiveness of a real-time solution, which can reduce inefficient pesticide use and increase crop yields, paving the way towards an autonomous pest detection system.
Exploring and Learning in Sparse Linear MDPs without Computationally Intractable Oracles
Sep 19, 2023The key assumption underlying linear Markov Decision Processes (MDPs) is that the learner has access to a known feature map $\phi(x, a)$ that maps state-action pairs to $d$-dimensional vectors, and that the rewards and transitions are linear functions in this representation. But where do these features come from? In the absence of expert domain knowledge, a tempting strategy is to use the ``kitchen sink" approach and hope that the true features are included in a much larger set of potential features. In this paper we revisit linear MDPs from the perspective of feature selection. In a $k$-sparse linear MDP, there is an unknown subset $S \subset [d]$ of size $k$ containing all the relevant features, and the goal is to learn a near-optimal policy in only poly$(k,\log d)$ interactions with the environment. Our main result is the first polynomial-time algorithm for this problem. In contrast, earlier works either made prohibitively strong assumptions that obviated the need for exploration, or required solving computationally intractable optimization problems. Along the way we introduce the notion of an emulator: a succinct approximate representation of the transitions that suffices for computing certain Bellman backups. Since linear MDPs are a non-parametric model, it is not even obvious whether polynomial-sized emulators exist. We show that they do exist and can be computed efficiently via convex programming. As a corollary of our main result, we give an algorithm for learning a near-optimal policy in block MDPs whose decoding function is a low-depth decision tree; the algorithm runs in quasi-polynomial time and takes a polynomial number of samples. This can be seen as a reinforcement learning analogue of classic results in computational learning theory. Furthermore, it gives a natural model where improving the sample complexity via representation learning is computationally feasible.
Novel Smart N95 Filtering Facepiece Respirator with Real-time Adaptive Fit Functionality and Wireless Humidity Monitoring for Enhanced Wearable Comfort
Sep 09, 2023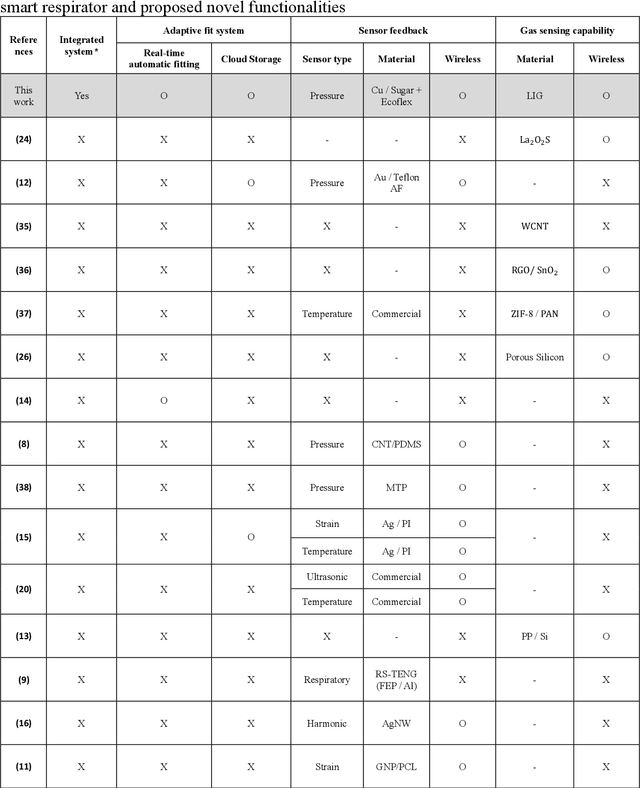
The widespread emergence of the COVID-19 pandemic has transformed our lifestyle, and facial respirators have become an essential part of daily life. Nevertheless, the current respirators possess several limitations such as poor respirator fit because they are incapable of covering diverse human facial sizes and shapes, potentially diminishing the effect of wearing respirators. In addition, the current facial respirators do not inform the user of the air quality within the smart facepiece respirator in case of continuous long-term use. Here, we demonstrate the novel smart N-95 filtering facepiece respirator that incorporates the humidity sensor and pressure sensory feedback-enabled self-fit adjusting functionality for the effective performance of the facial respirator to prevent the transmission of airborne pathogens. The laser-induced graphene (LIG) constitutes the humidity sensor, and the pressure sensor array based on the dielectric elastomeric sponge monitors the respirator contact on the face of the user, providing the sensory information for a closed-loop feedback mechanism. As a result of the self-fit adjusting mode along with elastomeric lining, the fit factor is increased by 3.20 and 5 times at average and maximum respectively. We expect that the experimental proof-of-concept of this work will offer viable solutions to the current commercial respirators to address the limitations.
SlowFast Network for Continuous Sign Language Recognition
Sep 21, 2023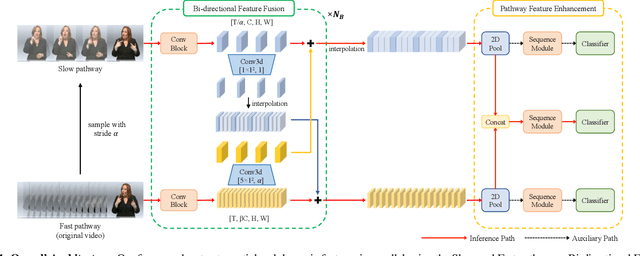
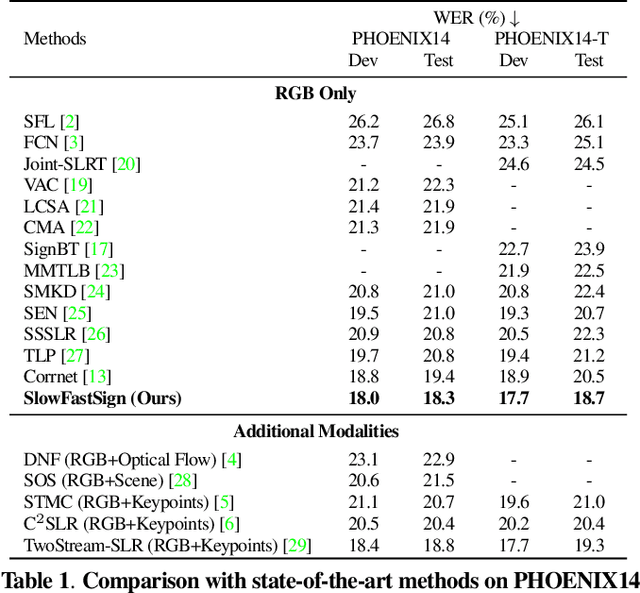
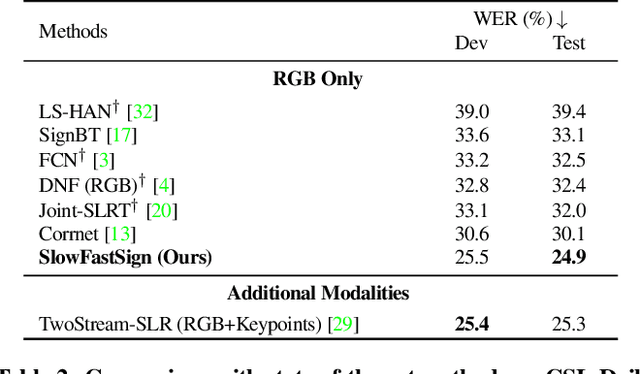
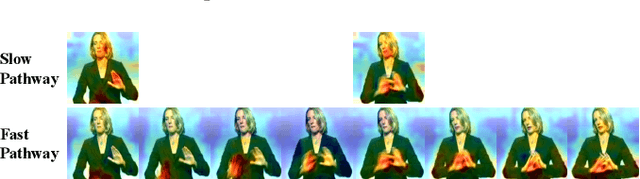
The objective of this work is the effective extraction of spatial and dynamic features for Continuous Sign Language Recognition (CSLR). To accomplish this, we utilise a two-pathway SlowFast network, where each pathway operates at distinct temporal resolutions to separately capture spatial (hand shapes, facial expressions) and dynamic (movements) information. In addition, we introduce two distinct feature fusion methods, carefully designed for the characteristics of CSLR: (1) Bi-directional Feature Fusion (BFF), which facilitates the transfer of dynamic semantics into spatial semantics and vice versa; and (2) Pathway Feature Enhancement (PFE), which enriches dynamic and spatial representations through auxiliary subnetworks, while avoiding the need for extra inference time. As a result, our model further strengthens spatial and dynamic representations in parallel. We demonstrate that the proposed framework outperforms the current state-of-the-art performance on popular CSLR datasets, including PHOENIX14, PHOENIX14-T, and CSL-Daily.
A knowledge representation approach for construction contract knowledge modeling
Sep 21, 2023The emergence of large language models (LLMs) presents an unprecedented opportunity to automate construction contract management, reducing human errors and saving significant time and costs. However, LLMs may produce convincing yet inaccurate and misleading content due to a lack of domain expertise. To address this issue, expert-driven contract knowledge can be represented in a structured manner to constrain the automatic contract management process. This paper introduces the Nested Contract Knowledge Graph (NCKG), a knowledge representation approach that captures the complexity of contract knowledge using a nested structure. It includes a nested knowledge representation framework, a NCKG ontology built on the framework, and an implementation method. Furthermore, we present the LLM-assisted contract review pipeline enhanced with external knowledge in NCKG. Our pipeline achieves a promising performance in contract risk reviewing, shedding light on the combination of LLM and KG towards more reliable and interpretable contract management.
Mean Absolute Directional Loss as a New Loss Function for Machine Learning Problems in Algorithmic Investment Strategies
Sep 19, 2023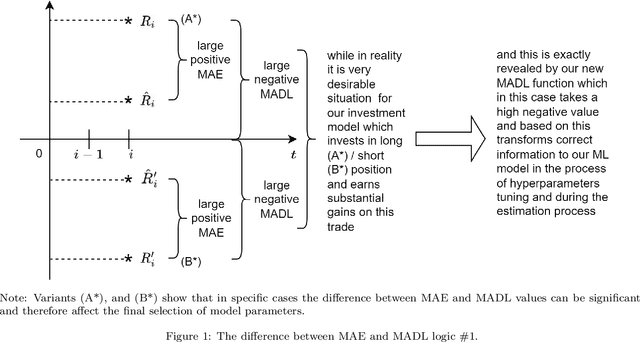
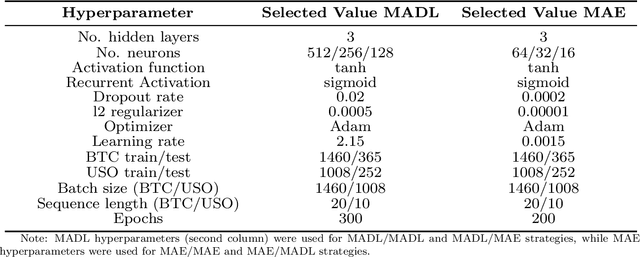
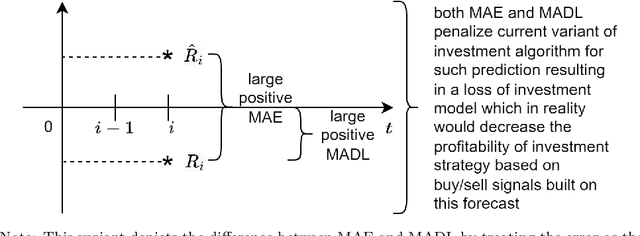
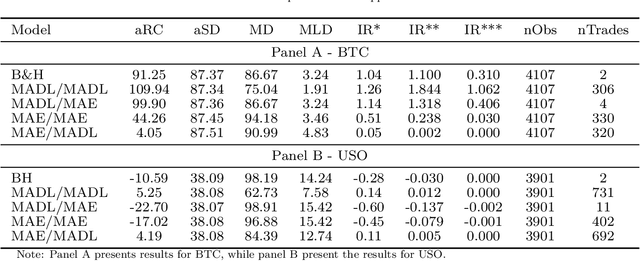
This paper investigates the issue of an adequate loss function in the optimization of machine learning models used in the forecasting of financial time series for the purpose of algorithmic investment strategies (AIS) construction. We propose the Mean Absolute Directional Loss (MADL) function, solving important problems of classical forecast error functions in extracting information from forecasts to create efficient buy/sell signals in algorithmic investment strategies. Finally, based on the data from two different asset classes (cryptocurrencies: Bitcoin and commodities: Crude Oil), we show that the new loss function enables us to select better hyperparameters for the LSTM model and obtain more efficient investment strategies, with regard to risk-adjusted return metrics on the out-of-sample data.
Graph topological property recovery with heat and wave dynamics-based features on graphs
Sep 19, 2023In this paper, we propose Graph Differential Equation Network (GDeNet), an approach that harnesses the expressive power of solutions to PDEs on a graph to obtain continuous node- and graph-level representations for various downstream tasks. We derive theoretical results connecting the dynamics of heat and wave equations to the spectral properties of the graph and to the behavior of continuous-time random walks on graphs. We demonstrate experimentally that these dynamics are able to capture salient aspects of graph geometry and topology by recovering generating parameters of random graphs, Ricci curvature, and persistent homology. Furthermore, we demonstrate the superior performance of GDeNet on real-world datasets including citation graphs, drug-like molecules, and proteins.