 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Construction contract risk identification based on knowledge-augmented language model
Sep 22, 2023
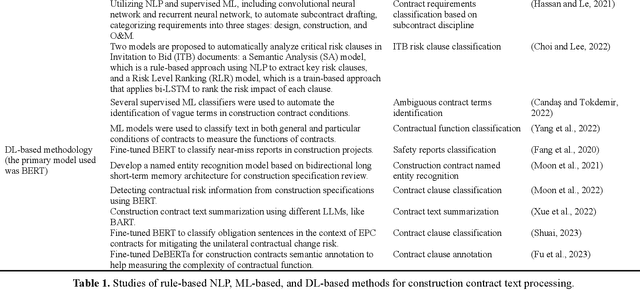
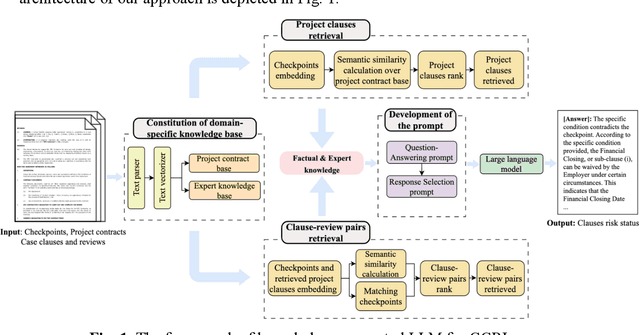
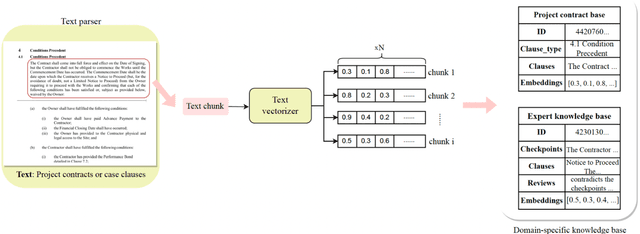
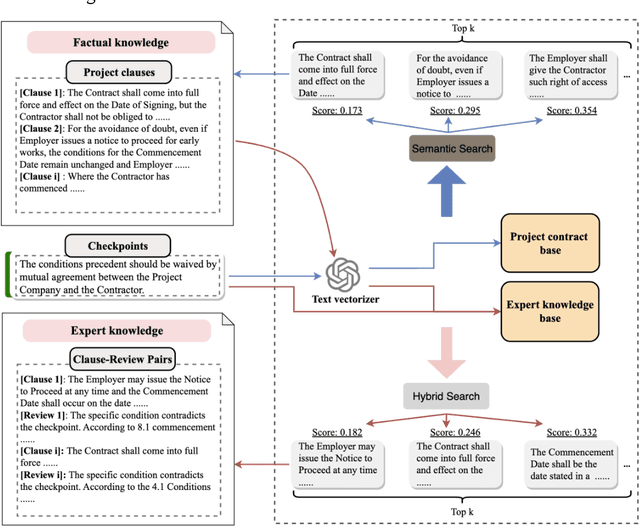
Contract review is an essential step in construction projects to prevent potential losses. However, the current methods for reviewing construction contracts lack effectiveness and reliability, leading to time-consuming and error-prone processes. While large language models (LLMs) have shown promise in revolutionizing natural language processing (NLP) tasks, they struggle with domain-specific knowledge and addressing specialized issues. This paper presents a novel approach that leverages LLMs with construction contract knowledge to emulate the process of contract review by human experts. Our tuning-free approach incorporates construction contract domain knowledge to enhance language models for identifying construction contract risks. The use of a natural language when building the domain knowledge base facilitates practical implementation. We evaluated our method on real construction contracts and achieved solid performance. Additionally, we investigated how large language models employ logical thinking during the task and provide insights and recommendations for future research.
Evaluating Dynamic Topic Models
Sep 12, 2023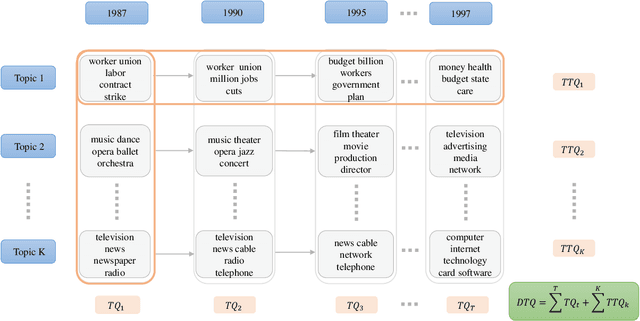
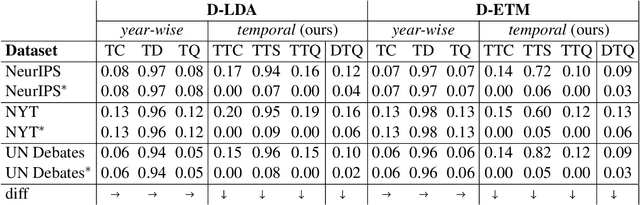
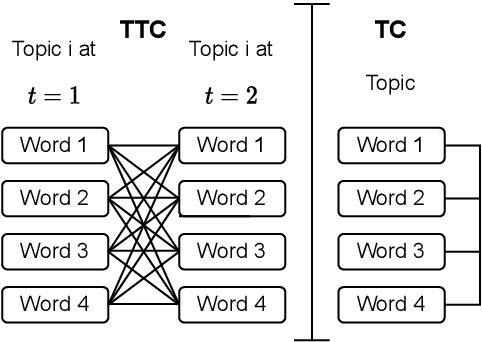
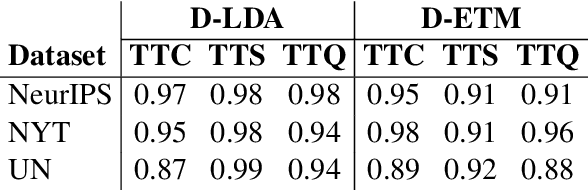
There is a lack of quantitative measures to evaluate the progression of topics through time in dynamic topic models (DTMs). Filling this gap, we propose a novel evaluation measure for DTMs that analyzes the changes in the quality of each topic over time. Additionally, we propose an extension combining topic quality with the model's temporal consistency. We demonstrate the utility of the proposed measure by applying it to synthetic data and data from existing DTMs. We also conducted a human evaluation, which indicates that the proposed measure correlates well with human judgment. Our findings may help in identifying changing topics, evaluating different DTMs, and guiding future research in this area.
SpeechAlign: a Framework for Speech Translation Alignment Evaluation
Sep 20, 2023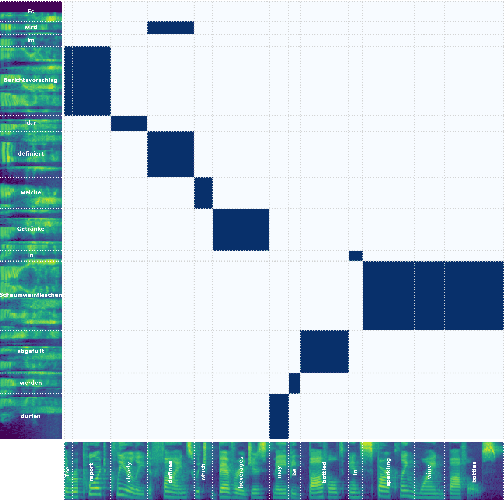
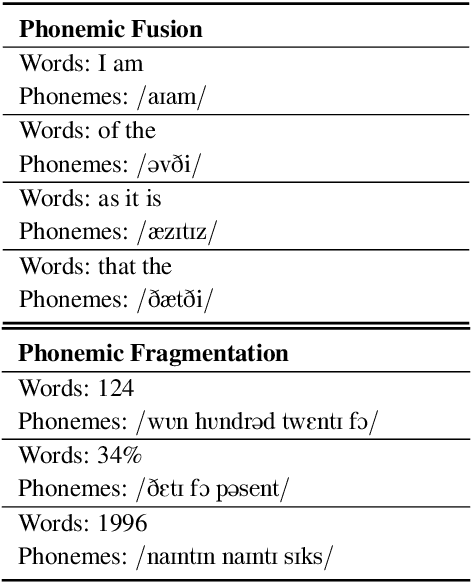
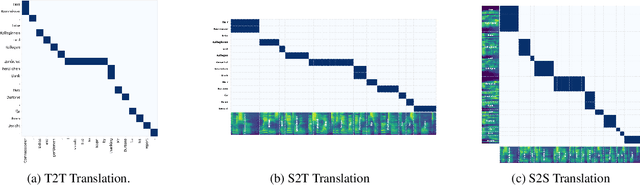
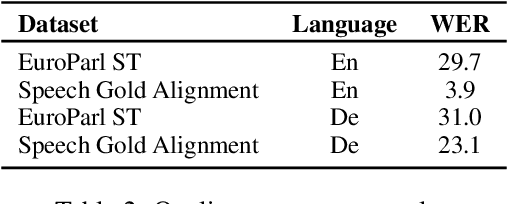
Speech-to-Speech and Speech-to-Text translation are currently dynamic areas of research. To contribute to these fields, we present SpeechAlign, a framework to evaluate the underexplored field of source-target alignment in speech models. Our framework has two core components. First, to tackle the absence of suitable evaluation datasets, we introduce the Speech Gold Alignment dataset, built upon a English-German text translation gold alignment dataset. Secondly, we introduce two novel metrics, Speech Alignment Error Rate (SAER) and Time-weighted Speech Alignment Error Rate (TW-SAER), to evaluate alignment quality in speech models. By publishing SpeechAlign we provide an accessible evaluation framework for model assessment, and we employ it to benchmark open-source Speech Translation models.
Source-Free Domain Adaptation with Temporal Imputation for Time Series Data
Jul 14, 2023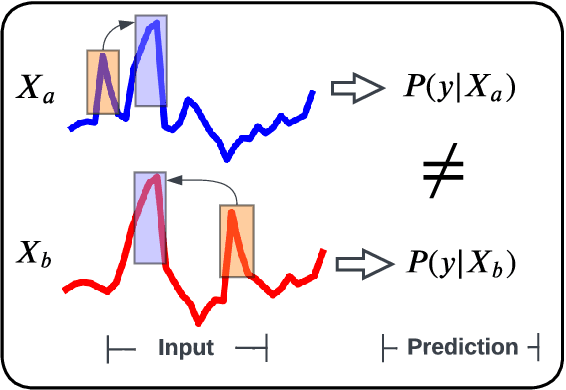
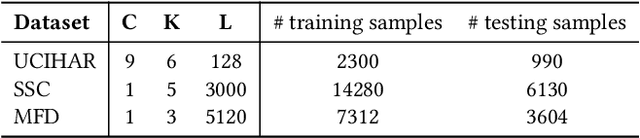
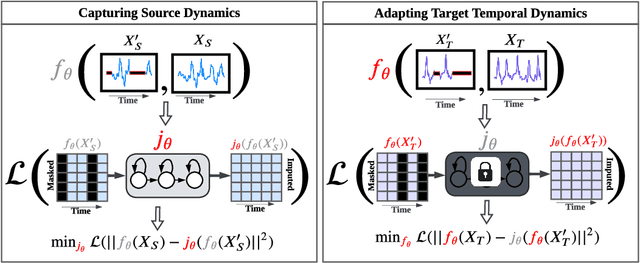
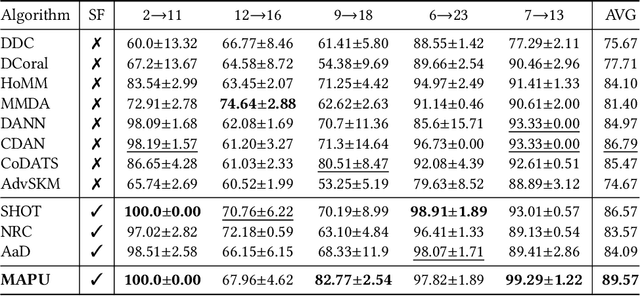
Source-free domain adaptation (SFDA) aims to adapt a pretrained model from a labeled source domain to an unlabeled target domain without access to the source domain data, preserving source domain privacy. Despite its prevalence in visual applications, SFDA is largely unexplored in time series applications. The existing SFDA methods that are mainly designed for visual applications may fail to handle the temporal dynamics in time series, leading to impaired adaptation performance. To address this challenge, this paper presents a simple yet effective approach for source-free domain adaptation on time series data, namely MAsk and imPUte (MAPU). First, to capture temporal information of the source domain, our method performs random masking on the time series signals while leveraging a novel temporal imputer to recover the original signal from a masked version in the embedding space. Second, in the adaptation step, the imputer network is leveraged to guide the target model to produce target features that are temporally consistent with the source features. To this end, our MAPU can explicitly account for temporal dependency during the adaptation while avoiding the imputation in the noisy input space. Our method is the first to handle temporal consistency in SFDA for time series data and can be seamlessly equipped with other existing SFDA methods. Extensive experiments conducted on three real-world time series datasets demonstrate that our MAPU achieves significant performance gain over existing methods. Our code is available at \url{https://github.com/mohamedr002/MAPU_SFDA_TS}.
Planning Optimal Trajectories for Mobile Manipulators under End-effector Trajectory Continuity Constraint
Sep 21, 2023Mobile manipulators have been employed in many applications which are usually performed by multiple fixed-base robots or a large-size system, thanks to the mobility of the mobile base. However, the mobile base also brings redundancies to the system, which makes trajectory planning more challenging. One class of problems recently arising from mobile 3D printing is the trajectory-continuous tasks, in which the end-effector is required to follow a designed continuous trajectory (time-parametrized path) in task space. This paper formulates and solves the optimal trajectory planning problem for mobile manipulators under end-effector trajectory continuity constraint, which allows considerations of other constraints and trajectory optimization. To demonstrate our method, a discrete optimal trajectory planning algorithm is proposed to solve mobile 3D printing tasks in multiple experiments.
Correlation-aware Spatial-Temporal Graph Learning for Multivariate Time-series Anomaly Detection
Jul 17, 2023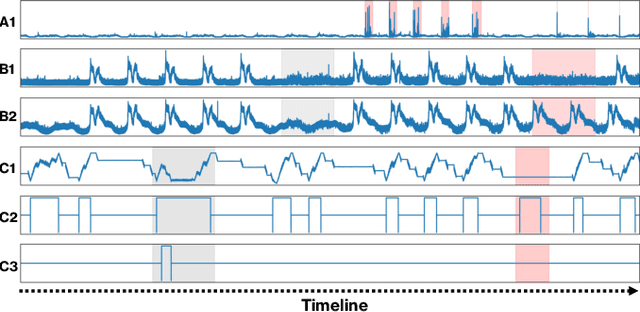
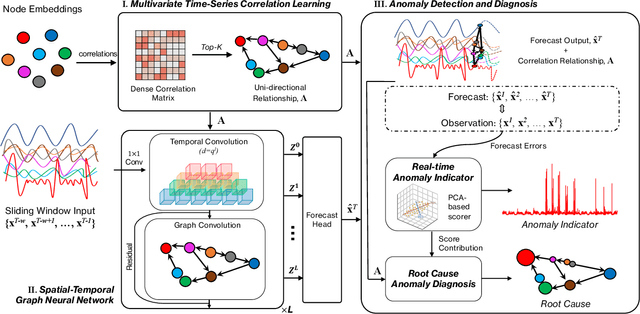
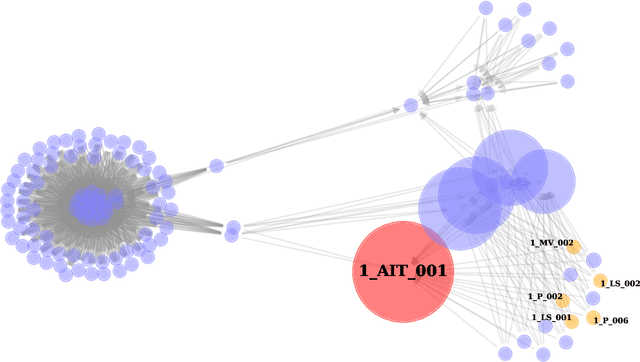
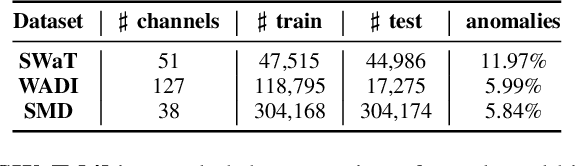
Multivariate time-series anomaly detection is critically important in many applications, including retail, transportation, power grid, and water treatment plants. Existing approaches for this problem mostly employ either statistical models which cannot capture the non-linear relations well or conventional deep learning models (e.g., CNN and LSTM) that do not explicitly learn the pairwise correlations among variables. To overcome these limitations, we propose a novel method, correlation-aware spatial-temporal graph learning (termed CST-GL), for time series anomaly detection. CST-GL explicitly captures the pairwise correlations via a multivariate time series correlation learning module based on which a spatial-temporal graph neural network (STGNN) can be developed. Then, by employing a graph convolution network that exploits one- and multi-hop neighbor information, our STGNN component can encode rich spatial information from complex pairwise dependencies between variables. With a temporal module that consists of dilated convolutional functions, the STGNN can further capture long-range dependence over time. A novel anomaly scoring component is further integrated into CST-GL to estimate the degree of an anomaly in a purely unsupervised manner. Experimental results demonstrate that CST-GL can detect anomalies effectively in general settings as well as enable early detection across different time delays.
Learning Spatial-Temporal Regularized Tensor Sparse RPCA for Background Subtraction
Sep 27, 2023Video background subtraction is one of the fundamental problems in computer vision that aims to segment all moving objects. Robust principal component analysis has been identified as a promising unsupervised paradigm for background subtraction tasks in the last decade thanks to its competitive performance in a number of benchmark datasets. Tensor robust principal component analysis variations have improved background subtraction performance further. However, because moving object pixels in the sparse component are treated independently and do not have to adhere to spatial-temporal structured-sparsity constraints, performance is reduced for sequences with dynamic backgrounds, camouflaged, and camera jitter problems. In this work, we present a spatial-temporal regularized tensor sparse RPCA algorithm for precise background subtraction. Within the sparse component, we impose spatial-temporal regularizations in the form of normalized graph-Laplacian matrices. To do this, we build two graphs, one across the input tensor spatial locations and the other across its frontal slices in the time domain. While maximizing the objective function, we compel the tensor sparse component to serve as the spatiotemporal eigenvectors of the graph-Laplacian matrices. The disconnected moving object pixels in the sparse component are preserved by the proposed graph-based regularizations since they both comprise of spatiotemporal subspace-based structure. Additionally, we propose a unique objective function that employs batch and online-based optimization methods to jointly maximize the background-foreground and spatial-temporal regularization components. Experiments are performed on six publicly available background subtraction datasets that demonstrate the superior performance of the proposed algorithm compared to several existing methods. Our source code will be available very soon.
Enhancing Missing Data Imputation of Non-stationary Signals with Harmonic Decomposition
Sep 08, 2023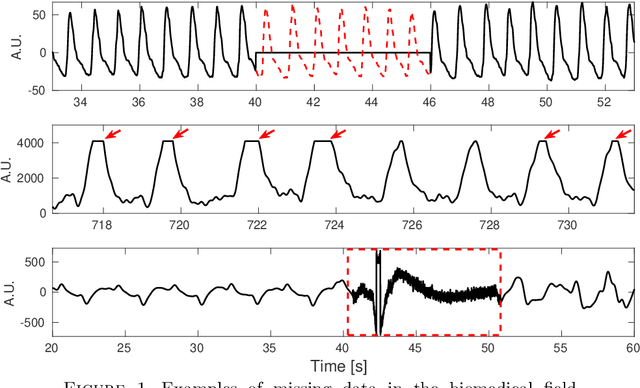
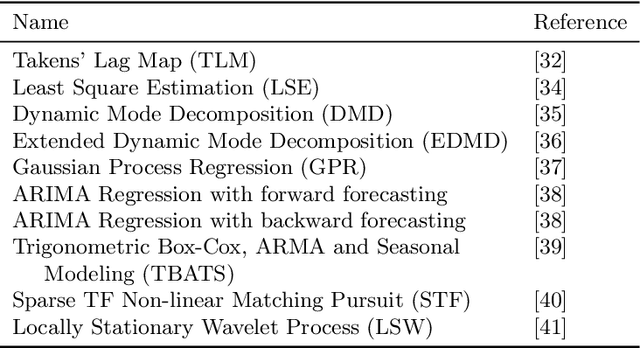
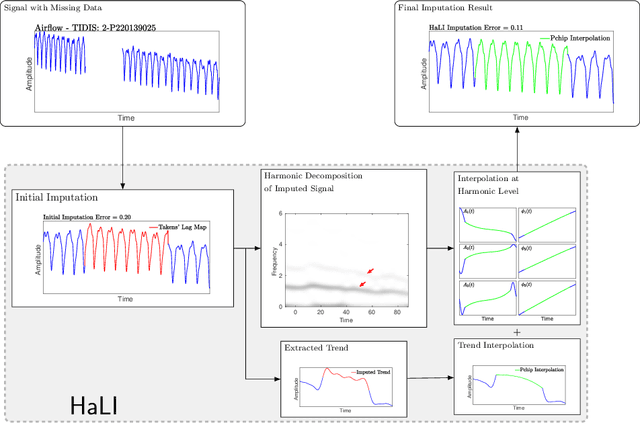
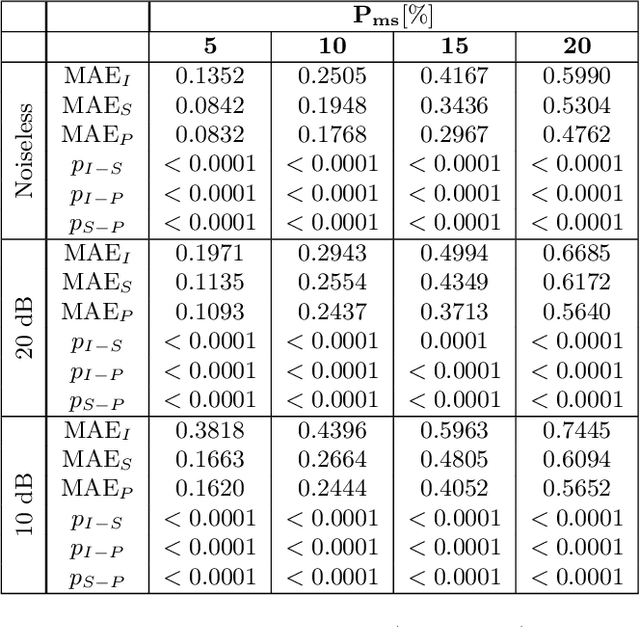
Dealing with time series with missing values, including those afflicted by low quality or over-saturation, presents a significant signal processing challenge. The task of recovering these missing values, known as imputation, has led to the development of several algorithms. However, we have observed that the efficacy of these algorithms tends to diminish when the time series exhibit non-stationary oscillatory behavior. In this paper, we introduce a novel algorithm, coined Harmonic Level Interpolation (HaLI), which enhances the performance of existing imputation algorithms for oscillatory time series. After running any chosen imputation algorithm, HaLI leverages the harmonic decomposition based on the adaptive nonharmonic model of the initial imputation to improve the imputation accuracy for oscillatory time series. Experimental assessments conducted on synthetic and real signals consistently highlight that HaLI enhances the performance of existing imputation algorithms. The algorithm is made publicly available as a readily employable Matlab code for other researchers to use.
CppFlow: Generative Inverse Kinematics for Efficient and Robust Cartesian Path Planning
Sep 16, 2023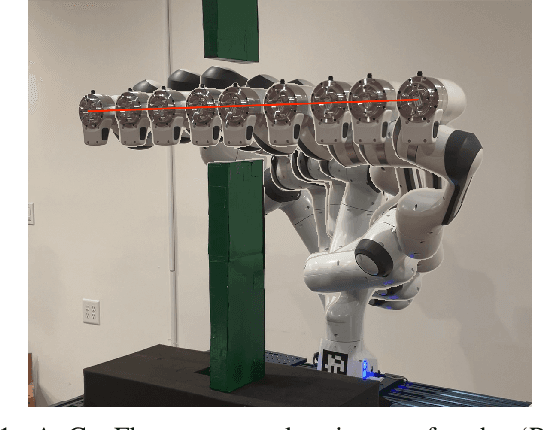
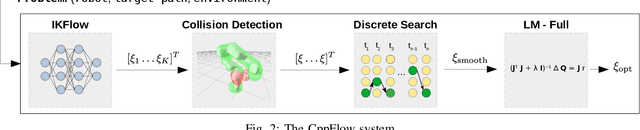
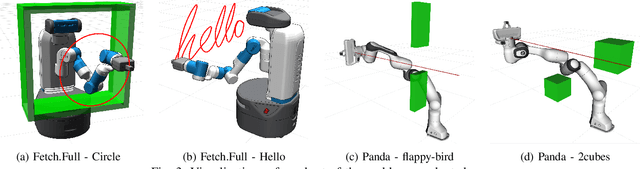
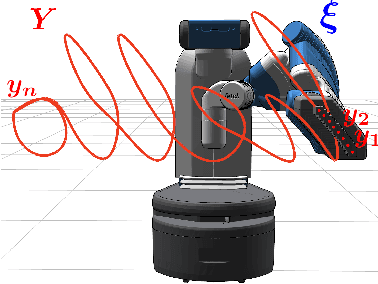
In this work we present CppFlow - a novel and performant planner for the Cartesian Path Planning problem, which finds valid trajectories up to 129x faster than current methods, while also succeeding on more difficult problems where others fail. At the core of the proposed algorithm is the use of a learned, generative Inverse Kinematics solver, which is able to efficiently produce promising entire candidate solution trajectories on the GPU. Precise, valid solutions are then found through classical approaches such as differentiable programming, global search, and optimization. In combining approaches from these two paradigms we get the best of both worlds - efficient approximate solutions from generative AI which are made exact using the guarantees of traditional planning and optimization. We evaluate our system against other state of the art methods on a set of established baselines as well as new ones introduced in this work and find that our method significantly outperforms others in terms of the time to find a valid solution and planning success rate, and performs comparably in terms of trajectory length over time. The work is made open source and available for use upon acceptance.
DeepTSF: Codeless machine learning operations for time series forecasting
Jul 28, 2023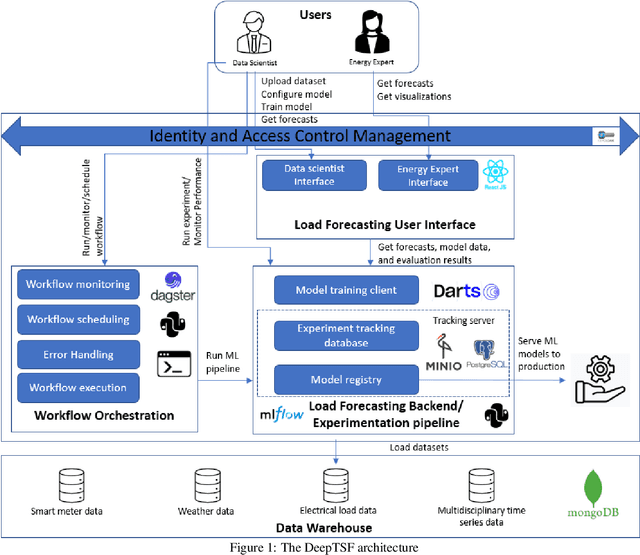
This paper presents DeepTSF, a comprehensive machine learning operations (MLOps) framework aiming to innovate time series forecasting through workflow automation and codeless modeling. DeepTSF automates key aspects of the ML lifecycle, making it an ideal tool for data scientists and MLops engineers engaged in machine learning (ML) and deep learning (DL)-based forecasting. DeepTSF empowers users with a robust and user-friendly solution, while it is designed to seamlessly integrate with existing data analysis workflows, providing enhanced productivity and compatibility. The framework offers a front-end user interface (UI) suitable for data scientists, as well as other higher-level stakeholders, enabling comprehensive understanding through insightful visualizations and evaluation metrics. DeepTSF also prioritizes security through identity management and access authorization mechanisms. The application of DeepTSF in real-life use cases of the I-NERGY project has already proven DeepTSF's efficacy in DL-based load forecasting, showcasing its significant added value in the electrical power and energy systems domain.