 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Twin Graph-based Anomaly Detection via Attentive Multi-Modal Learning for Microservice System
Oct 07, 2023
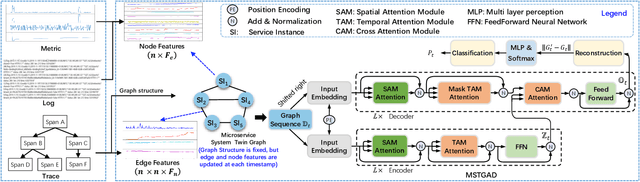
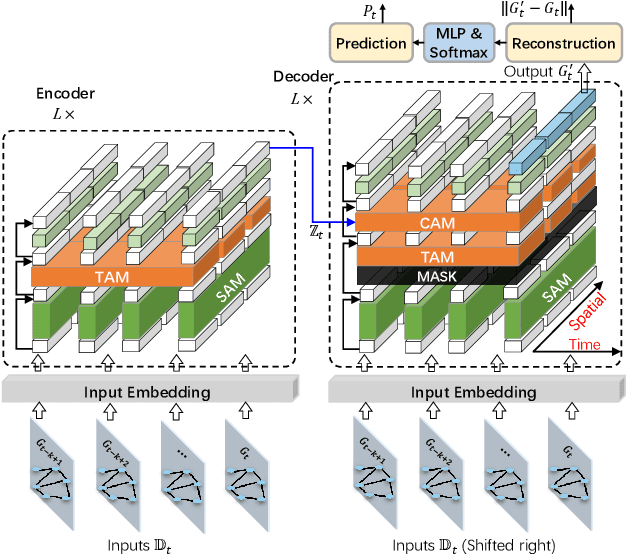
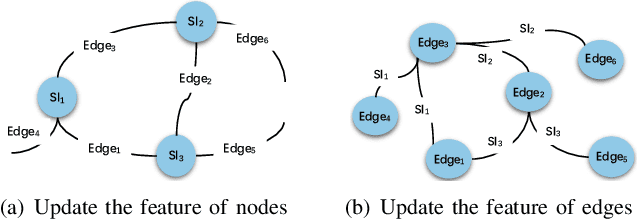
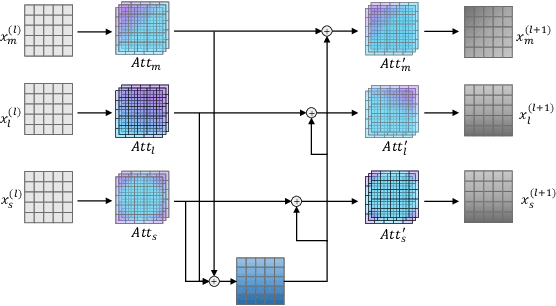
Microservice architecture has sprung up over recent years for managing enterprise applications, due to its ability to independently deploy and scale services. Despite its benefits, ensuring the reliability and safety of a microservice system remains highly challenging. Existing anomaly detection algorithms based on a single data modality (i.e., metrics, logs, or traces) fail to fully account for the complex correlations and interactions between different modalities, leading to false negatives and false alarms, whereas incorporating more data modalities can offer opportunities for further performance gain. As a fresh attempt, we propose in this paper a semi-supervised graph-based anomaly detection method, MSTGAD, which seamlessly integrates all available data modalities via attentive multi-modal learning. First, we extract and normalize features from the three modalities, and further integrate them using a graph, namely MST (microservice system twin) graph, where each node represents a service instance and the edge indicates the scheduling relationship between different service instances. The MST graph provides a virtual representation of the status and scheduling relationships among service instances of a real-world microservice system. Second, we construct a transformer-based neural network with both spatial and temporal attention mechanisms to model the inter-correlations between different modalities and temporal dependencies between the data points. This enables us to detect anomalies automatically and accurately in real-time. The source code of MSTGAD is publicly available at https://github.com/alipay/microservice_system_twin_graph_based_anomaly_detection.
TimeGNN: Temporal Dynamic Graph Learning for Time Series Forecasting
Jul 27, 2023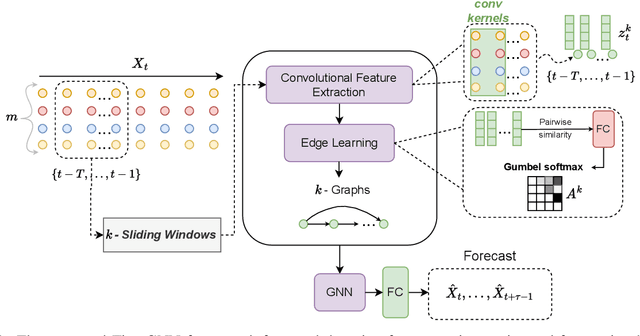
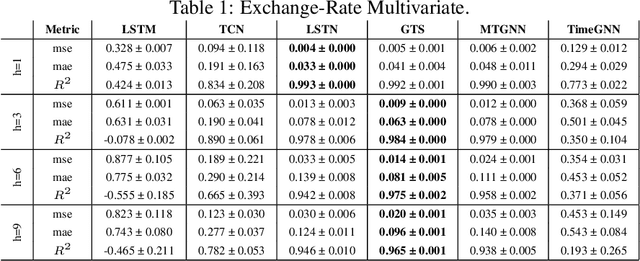
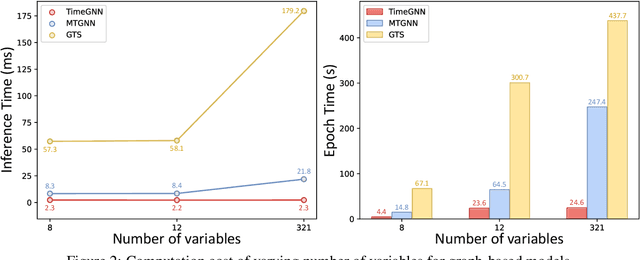
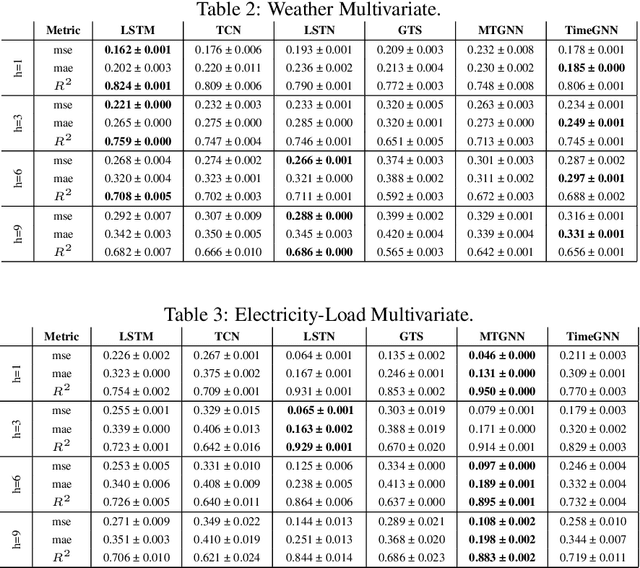
Time series forecasting lies at the core of important real-world applications in many fields of science and engineering. The abundance of large time series datasets that consist of complex patterns and long-term dependencies has led to the development of various neural network architectures. Graph neural network approaches, which jointly learn a graph structure based on the correlation of raw values of multivariate time series while forecasting, have recently seen great success. However, such solutions are often costly to train and difficult to scale. In this paper, we propose TimeGNN, a method that learns dynamic temporal graph representations that can capture the evolution of inter-series patterns along with the correlations of multiple series. TimeGNN achieves inference times 4 to 80 times faster than other state-of-the-art graph-based methods while achieving comparable forecasting performance
HOD: A Benchmark Dataset for Harmful Object Detection
Oct 08, 2023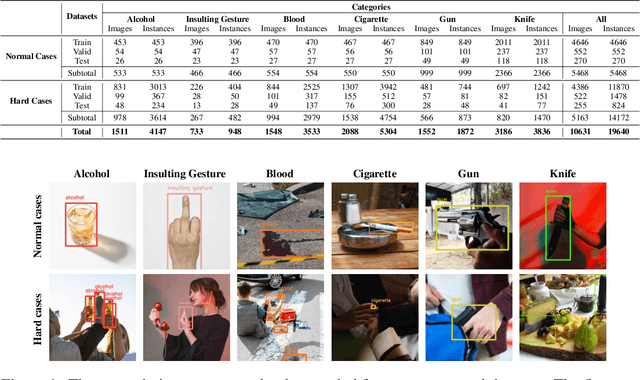
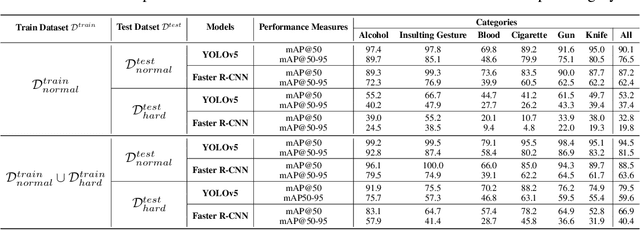
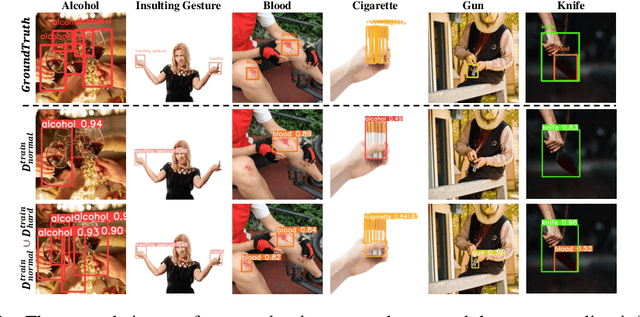
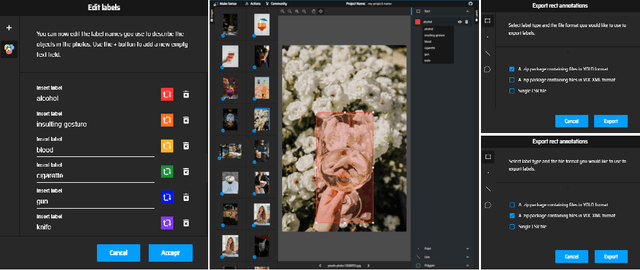
Recent multi-media data such as images and videos have been rapidly spread out on various online services such as social network services (SNS). With the explosive growth of online media services, the number of image content that may harm users is also growing exponentially. Thus, most recent online platforms such as Facebook and Instagram have adopted content filtering systems to prevent the prevalence of harmful content and reduce the possible risk of adverse effects on users. Unfortunately, computer vision research on detecting harmful content has not yet attracted attention enough. Users of each platform still manually click the report button to recognize patterns of harmful content they dislike when exposed to harmful content. However, the problem with manual reporting is that users are already exposed to harmful content. To address these issues, our research goal in this work is to develop automatic harmful object detection systems for online services. We present a new benchmark dataset for harmful object detection. Unlike most related studies focusing on a small subset of object categories, our dataset addresses various categories. Specifically, our proposed dataset contains more than 10,000 images across 6 categories that might be harmful, consisting of not only normal cases but also hard cases that are difficult to detect. Moreover, we have conducted extensive experiments to evaluate the effectiveness of our proposed dataset. We have utilized the recently proposed state-of-the-art (SOTA) object detection architectures and demonstrated our proposed dataset can be greatly useful for the real-time harmful object detection task. The whole source codes and datasets are publicly accessible at https://github.com/poori-nuna/HOD-Benchmark-Dataset.
Back to the Future: Towards Explainable Temporal Reasoning with Large Language Models
Oct 08, 2023Temporal reasoning is a crucial NLP task, providing a nuanced understanding of time-sensitive contexts within textual data. Although recent advancements in LLMs have demonstrated their potential in temporal reasoning, the predominant focus has been on tasks such as temporal expression and temporal relation extraction. These tasks are primarily designed for the extraction of direct and past temporal cues and to engage in simple reasoning processes. A significant gap remains when considering complex reasoning tasks such as event forecasting, which requires multi-step temporal reasoning on events and prediction on the future timestamp. Another notable limitation of existing methods is their incapability to provide an illustration of their reasoning process, hindering explainability. In this paper, we introduce the first task of explainable temporal reasoning, to predict an event's occurrence at a future timestamp based on context which requires multiple reasoning over multiple events, and subsequently provide a clear explanation for their prediction. Our task offers a comprehensive evaluation of both the LLMs' complex temporal reasoning ability, the future event prediction ability, and explainability-a critical attribute for AI applications. To support this task, we present the first multi-source instruction-tuning dataset of explainable temporal reasoning (ExpTime) with 26k derived from the temporal knowledge graph datasets and their temporal reasoning paths, using a novel knowledge-graph-instructed-generation strategy. Based on the dataset, we propose the first open-source LLM series TimeLlaMA based on the foundation LlaMA2, with the ability of instruction following for explainable temporal reasoning. We compare the performance of our method and a variety of LLMs, where our method achieves the state-of-the-art performance of temporal prediction and explanation.
Tree Cross Attention
Sep 29, 2023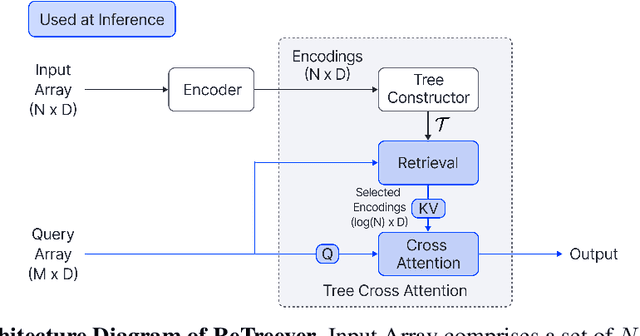
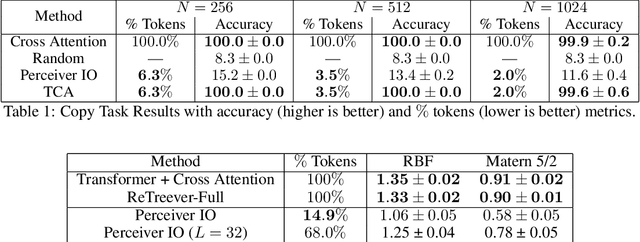
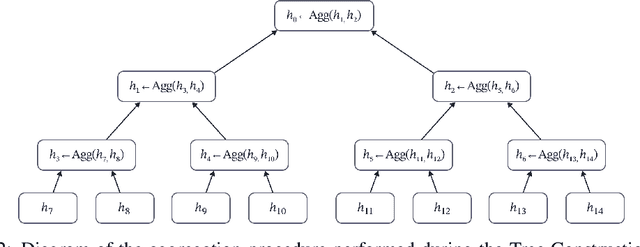
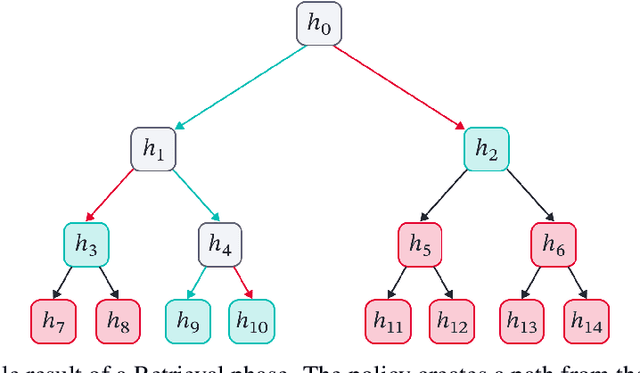
Cross Attention is a popular method for retrieving information from a set of context tokens for making predictions. At inference time, for each prediction, Cross Attention scans the full set of $\mathcal{O}(N)$ tokens. In practice, however, often only a small subset of tokens are required for good performance. Methods such as Perceiver IO are cheap at inference as they distill the information to a smaller-sized set of latent tokens $L < N$ on which cross attention is then applied, resulting in only $\mathcal{O}(L)$ complexity. However, in practice, as the number of input tokens and the amount of information to distill increases, the number of latent tokens needed also increases significantly. In this work, we propose Tree Cross Attention (TCA) - a module based on Cross Attention that only retrieves information from a logarithmic $\mathcal{O}(\log(N))$ number of tokens for performing inference. TCA organizes the data in a tree structure and performs a tree search at inference time to retrieve the relevant tokens for prediction. Leveraging TCA, we introduce ReTreever, a flexible architecture for token-efficient inference. We show empirically that Tree Cross Attention (TCA) performs comparable to Cross Attention across various classification and uncertainty regression tasks while being significantly more token-efficient. Furthermore, we compare ReTreever against Perceiver IO, showing significant gains while using the same number of tokens for inference.
Probabilistic Sampling-Enhanced Temporal-Spatial GCN: A Scalable Framework for Transaction Anomaly Detection in Ethereum Networks
Sep 29, 2023The rapid evolution of the Ethereum network necessitates sophisticated techniques to ensure its robustness against potential threats and to maintain transparency. While Graph Neural Networks (GNNs) have pioneered anomaly detection in such platforms, capturing the intricacies of both spatial and temporal transactional patterns has remained a challenge. This study presents a fusion of Graph Convolutional Networks (GCNs) with Temporal Random Walks (TRW) enhanced by probabilistic sampling to bridge this gap. Our approach, unlike traditional GCNs, leverages the strengths of TRW to discern complex temporal sequences in Ethereum transactions, thereby providing a more nuanced transaction anomaly detection mechanism. Preliminary evaluations demonstrate that our TRW-GCN framework substantially advances the performance metrics over conventional GCNs in detecting anomalies and transaction bursts. This research not only underscores the potential of temporal cues in Ethereum transactional data but also offers a scalable and effective methodology for ensuring the security and transparency of decentralized platforms. By harnessing both spatial relationships and time-based transactional sequences as node features, our model introduces an additional layer of granularity, making the detection process more robust and less prone to false positives. This work lays the foundation for future research aimed at optimizing and enhancing the transparency of blockchain technologies, and serves as a testament to the significance of considering both time and space dimensions in the ever-evolving landscape of the decentralized platforms.
Graph-based Simultaneous Localization and Bias Tracking
Oct 05, 2023We present a factor graph formulation and particle-based sum-product algorithm for robust localization and tracking in multipath-prone environments. The proposed sequential algorithm jointly estimates the mobile agent's position together with a time-varying number of multipath components (MPCs). The MPCs are represented by "delay biases" corresponding to the offset between line-of-sight (LOS) component delay and the respective delays of all detectable MPCs. The delay biases of the MPCs capture the geometric features of the propagation environment with respect to the mobile agent. Therefore, they can provide position-related information contained in the MPCs without explicitly building a map of the environment. We demonstrate that the position-related information enables the algorithm to provide high-accuracy position estimates even in fully obstructed line-of-sight (OLOS) situations. Using simulated and real measurements in different scenarios we demonstrate the proposed algorithm to significantly outperform state-of-the-art multipath-aided tracking algorithms and show that the performance of our algorithm constantly attains the posterior Cramer-Rao lower bound (P-CRLB). Furthermore, we demonstrate the implicit capability of the proposed method to identify unreliable measurements and, thus, to mitigate lost tracks.
Probabilistically Rewired Message-Passing Neural Networks
Oct 05, 2023Message-passing graph neural networks (MPNNs) emerged as powerful tools for processing graph-structured input. However, they operate on a fixed input graph structure, ignoring potential noise and missing information. Furthermore, their local aggregation mechanism can lead to problems such as over-squashing and limited expressive power in capturing relevant graph structures. Existing solutions to these challenges have primarily relied on heuristic methods, often disregarding the underlying data distribution. Hence, devising principled approaches for learning to infer graph structures relevant to the given prediction task remains an open challenge. In this work, leveraging recent progress in exact and differentiable $k$-subset sampling, we devise probabilistically rewired MPNNs (PR-MPNNs), which learn to add relevant edges while omitting less beneficial ones. For the first time, our theoretical analysis explores how PR-MPNNs enhance expressive power, and we identify precise conditions under which they outperform purely randomized approaches. Empirically, we demonstrate that our approach effectively mitigates issues like over-squashing and under-reaching. In addition, on established real-world datasets, our method exhibits competitive or superior predictive performance compared to traditional MPNN models and recent graph transformer architectures.
Speaker localization using direct path dominance test based on sound field directivity
Oct 05, 2023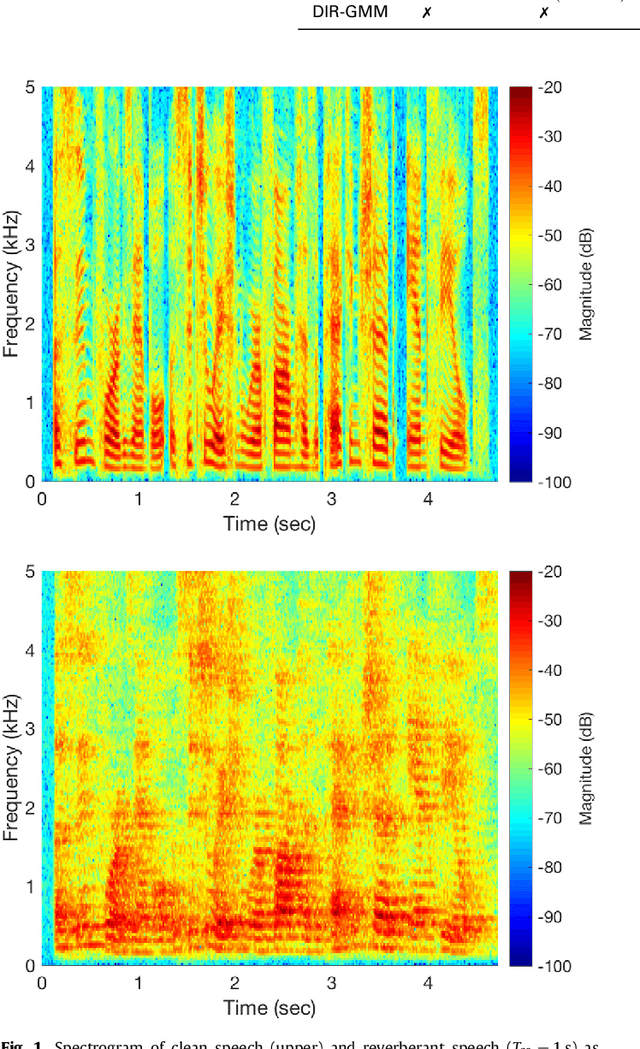
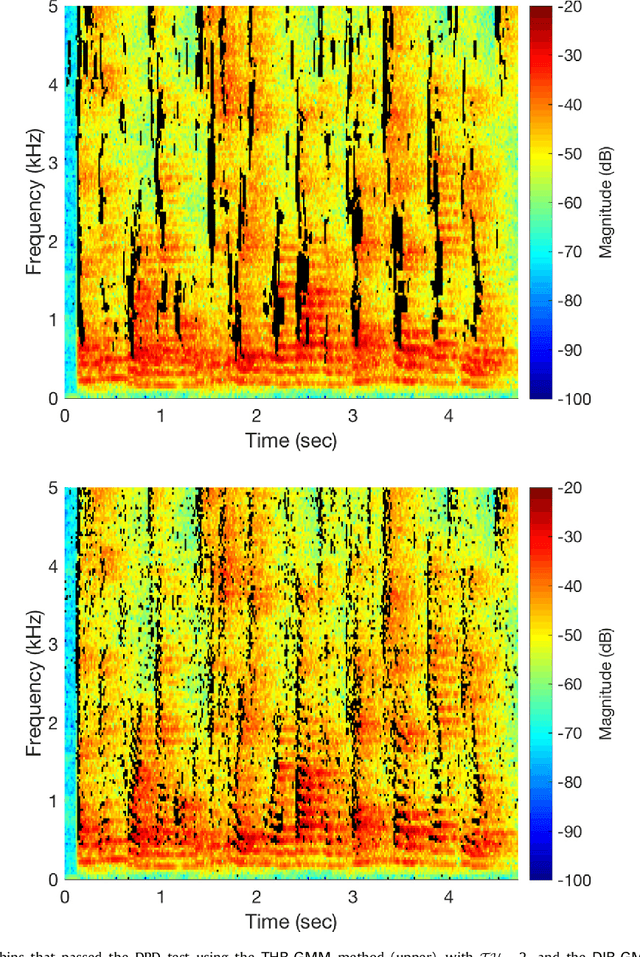

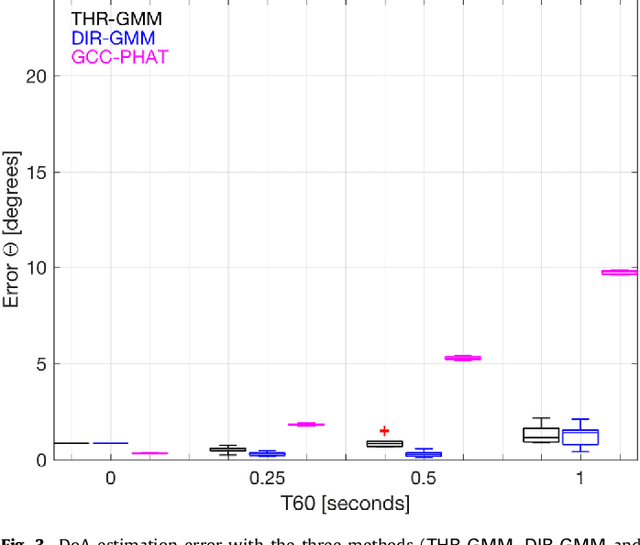
Estimation of the direction-of-arrival (DoA) of a speaker in a room is important in many audio signal processing applications. Environments with reverberation that masks the DoA information are particularly challenging. Recently, a DoA estimation method that is robust to reverberation has been developed. This method identifies time-frequency bins dominated by the contribution from the direct path, which carries the correct DoA information. However, its implementation is computationally demanding as it requires frequency smoothing to overcome the effect of coherent early reflections and matrix decomposition to apply the direct-path dominance (DPD) test. In this work, a novel computationally-efficient alternative to the DPD test is proposed, based on the directivity measure for sensor arrays, which requires neither frequency smoothing nor matrix decomposition, and which has been reformulated for sound field directivity with spherical microphone arrays. The paper presents the proposed method and a comparison to previous methods under a range of reverberation and noise conditions. Result demonstrate that the proposed method shows comparable performance to the original method in terms of robustness to reverberation and noise, and is about four times more computationally efficient for the given experiment.
TWICE Dataset: Digital Twin of Test Scenarios in a Controlled Environment
Oct 05, 2023Ensuring the safe and reliable operation of autonomous vehicles under adverse weather remains a significant challenge. To address this, we have developed a comprehensive dataset composed of sensor data acquired in a real test track and reproduced in the laboratory for the same test scenarios. The provided dataset includes camera, radar, LiDAR, inertial measurement unit (IMU), and GPS data recorded under adverse weather conditions (rainy, night-time, and snowy conditions). We recorded test scenarios using objects of interest such as car, cyclist, truck and pedestrian -- some of which are inspired by EURONCAP (European New Car Assessment Programme). The sensor data generated in the laboratory is acquired by the execution of simulation-based tests in hardware-in-the-loop environment with the digital twin of each real test scenario. The dataset contains more than 2 hours of recording, which totals more than 280GB of data. Therefore, it is a valuable resource for researchers in the field of autonomous vehicles to test and improve their algorithms in adverse weather conditions, as well as explore the simulation-to-reality gap. The dataset is available for download at: https://twicedataset.github.io/site/