 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
CORec-Cri: How collaborative and social technologies can help to contextualize crises?
Oct 03, 2023
Crisis situations can present complex and multifaceted challenges, often requiring the involvement of multiple organizations and stakeholders with varying areas of expertise, responsibilities, and resources. Acquiring accurate and timely information about impacted areas is crucial to effectively respond to these crises. In this paper, we investigate how collaborative and social technologies help to contextualize crises, including identifying impacted areas and real-time needs. To this end, we define CORec-Cri (Contextulized Ontology-based Recommender system for crisis management) based on existing work. Our motivation for this approach is two-fold: first, effective collaboration among stakeholders is essential for efficient and coordinated crisis response; second, social computing facilitates interaction, information flow, and collaboration among stakeholders. We detail the key components of our system design, highlighting its potential to support decision-making, resource allocation, and communication among stakeholders. Finally, we provide examples of how our system can be applied to contextualize crises to improve crisis management.
Hierarchical Evaluation Framework: Best Practices for Human Evaluation
Oct 03, 2023Human evaluation plays a crucial role in Natural Language Processing (NLP) as it assesses the quality and relevance of developed systems, thereby facilitating their enhancement. However, the absence of widely accepted human evaluation metrics in NLP hampers fair comparisons among different systems and the establishment of universal assessment standards. Through an extensive analysis of existing literature on human evaluation metrics, we identified several gaps in NLP evaluation methodologies. These gaps served as motivation for developing our own hierarchical evaluation framework. The proposed framework offers notable advantages, particularly in providing a more comprehensive representation of the NLP system's performance. We applied this framework to evaluate the developed Machine Reading Comprehension system, which was utilized within a human-AI symbiosis model. The results highlighted the associations between the quality of inputs and outputs, underscoring the necessity to evaluate both components rather than solely focusing on outputs. In future work, we will investigate the potential time-saving benefits of our proposed framework for evaluators assessing NLP systems.
Online Active Learning For Sound Event Detection
Sep 25, 2023Data collection and annotation is a laborious, time-consuming prerequisite for supervised machine learning tasks. Online Active Learning (OAL) is a paradigm that addresses this issue by simultaneously minimizing the amount of annotation required to train a classifier and adapting to changes in the data over the duration of the data collection process. Prior work has indicated that fluctuating class distributions and data drift are still common problems for OAL. This work presents new loss functions that address these challenges when OAL is applied to Sound Event Detection (SED). Experimental results from the SONYC dataset and two Voice-Type Discrimination (VTD) corpora indicate that OAL can reduce the time and effort required to train SED classifiers by a factor of 5 for SONYC, and that the new methods presented here successfully resolve issues present in existing OAL methods.
Outage-Watch: Early Prediction of Outages using Extreme Event Regularizer
Sep 29, 2023Cloud services are omnipresent and critical cloud service failure is a fact of life. In order to retain customers and prevent revenue loss, it is important to provide high reliability guarantees for these services. One way to do this is by predicting outages in advance, which can help in reducing the severity as well as time to recovery. It is difficult to forecast critical failures due to the rarity of these events. Moreover, critical failures are ill-defined in terms of observable data. Our proposed method, Outage-Watch, defines critical service outages as deteriorations in the Quality of Service (QoS) captured by a set of metrics. Outage-Watch detects such outages in advance by using current system state to predict whether the QoS metrics will cross a threshold and initiate an extreme event. A mixture of Gaussian is used to model the distribution of the QoS metrics for flexibility and an extreme event regularizer helps in improving learning in tail of the distribution. An outage is predicted if the probability of any one of the QoS metrics crossing threshold changes significantly. Our evaluation on a real-world SaaS company dataset shows that Outage-Watch significantly outperforms traditional methods with an average AUC of 0.98. Additionally, Outage-Watch detects all the outages exhibiting a change in service metrics and reduces the Mean Time To Detection (MTTD) of outages by up to 88% when deployed in an enterprise cloud-service system, demonstrating efficacy of our proposed method.
Integrated Communication, Sensing, and Computation Framework for 6G Networks
Oct 05, 2023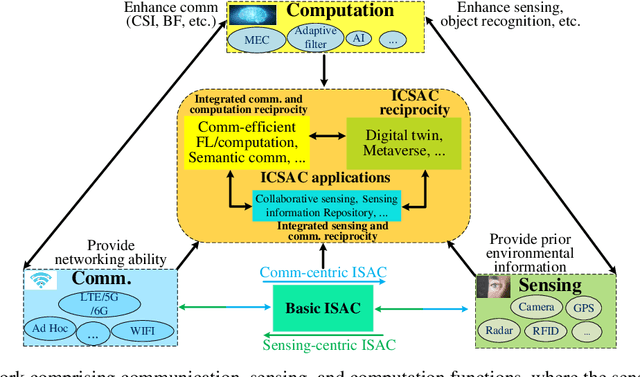
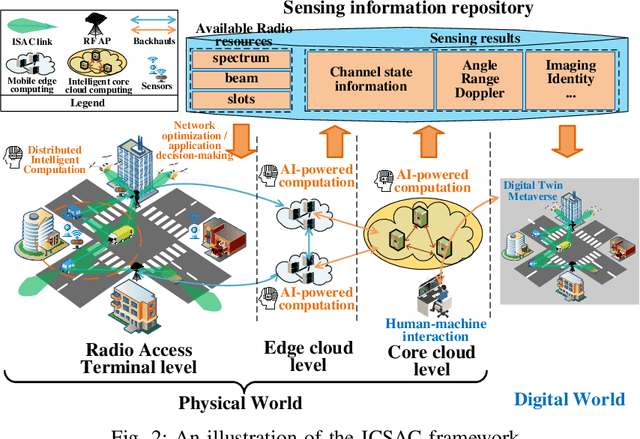
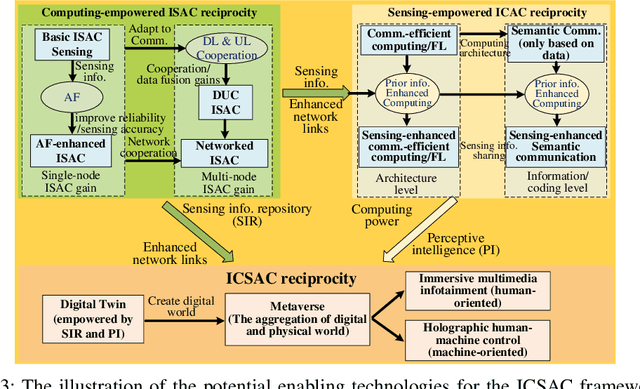
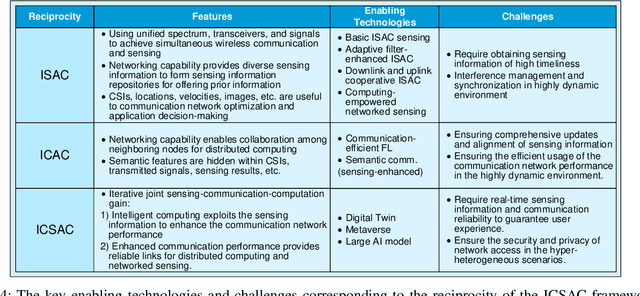
In the sixth generation (6G) era, intelligent machine network (IMN) applications, such as intelligent transportation, require collaborative machines with communication, sensing, and computation (CSC) capabilities. This article proposes an integrated communication, sensing, and computation (ICSAC) framework for 6G to achieve the reciprocity among CSC functions to enhance the reliability and latency of communication, accuracy and timeliness of sensing information acquisition, and privacy and security of computing to realize the IMN applications. Specifically, the sensing and communication functions can merge into unified platforms using the same transmit signals, and the acquired real-time sensing information can be exploited as prior information for intelligent algorithms to enhance the performance of communication networks. This is called the computing-empowered integrated sensing and communications (ISAC) reciprocity. Such reciprocity can further improve the performance of distributed computation with the assistance of networked sensing capability, which is named the sensing-empowered integrated communications and computation (ICAC) reciprocity. The above ISAC and ICAC reciprocities can enhance each other iteratively and finally lead to the ICSAC reciprocity. To achieve these reciprocities, we explore the potential enabling technologies for the ICSAC framework. Finally, we present the evaluation results of crucial enabling technologies to show the feasibility of the ICSAC framework.
SWoTTeD: An Extension of Tensor Decomposition to Temporal Phenotyping
Oct 02, 2023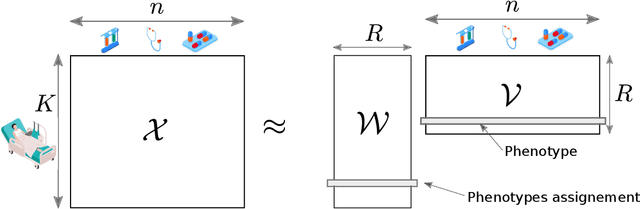
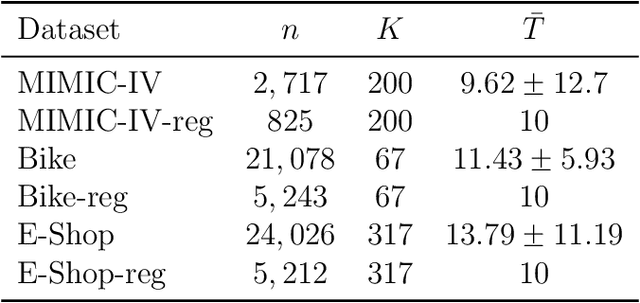
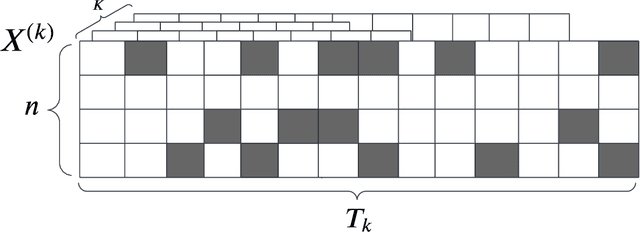
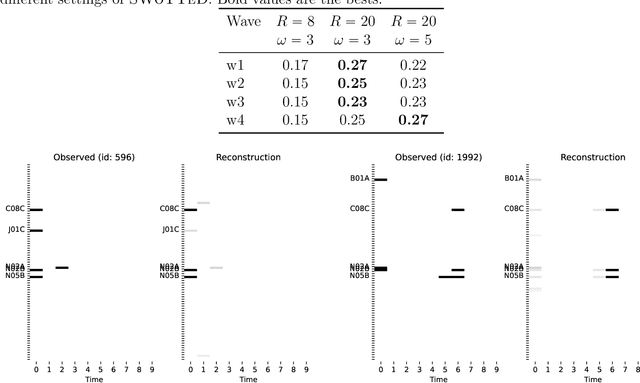
Tensor decomposition has recently been gaining attention in the machine learning community for the analysis of individual traces, such as Electronic Health Records (EHR). However, this task becomes significantly more difficult when the data follows complex temporal patterns. This paper introduces the notion of a temporal phenotype as an arrangement of features over time and it proposes SWoTTeD (Sliding Window for Temporal Tensor Decomposition), a novel method to discover hidden temporal patterns. SWoTTeD integrates several constraints and regularizations to enhance the interpretability of the extracted phenotypes. We validate our proposal using both synthetic and real-world datasets, and we present an original usecase using data from the Greater Paris University Hospital. The results show that SWoTTeD achieves at least as accurate reconstruction as recent state-of-the-art tensor decomposition models, and extracts temporal phenotypes that are meaningful for clinicians.
OceanChat: Piloting Autonomous Underwater Vehicles in Natural Language
Sep 27, 2023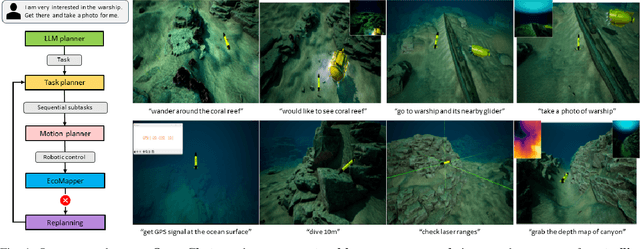
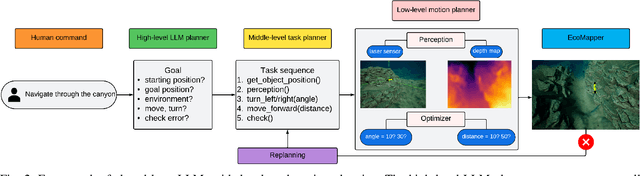
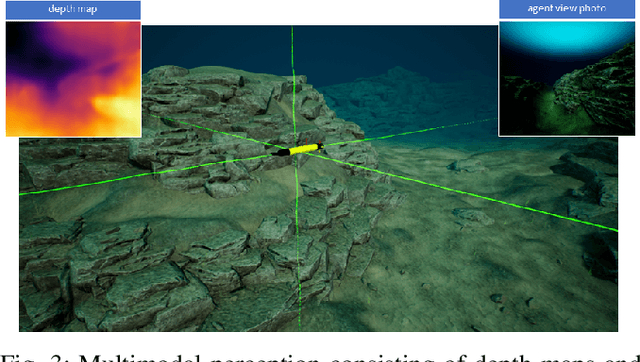
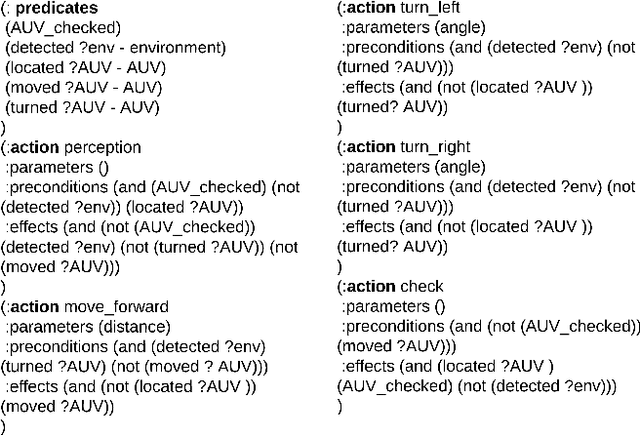
In the trending research of fusing Large Language Models (LLMs) and robotics, we aim to pave the way for innovative development of AI systems that can enable Autonomous Underwater Vehicles (AUVs) to seamlessly interact with humans in an intuitive manner. We propose OceanChat, a system that leverages a closed-loop LLM-guided task and motion planning framework to tackle AUV missions in the wild. LLMs translate an abstract human command into a high-level goal, while a task planner further grounds the goal into a task sequence with logical constraints. To assist the AUV with understanding the task sequence, we utilize a motion planner to incorporate real-time Lagrangian data streams received by the AUV, thus mapping the task sequence into an executable motion plan. Considering the highly dynamic and partially known nature of the underwater environment, an event-triggered replanning scheme is developed to enhance the system's robustness towards uncertainty. We also build a simulation platform HoloEco that generates photo-realistic simulation for a wide range of AUV applications. Experimental evaluation verifies that the proposed system can achieve improved performance in terms of both success rate and computation time. Project website: \url{https://sites.google.com/view/oceanchat}
DIVERSIFY: A General Framework for Time Series Out-of-distribution Detection and Generalization
Aug 04, 2023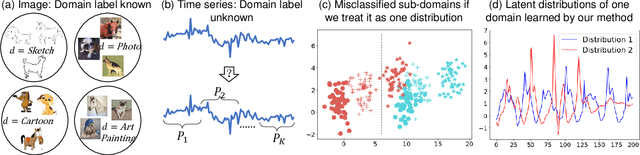
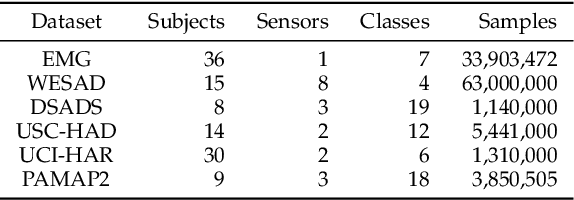
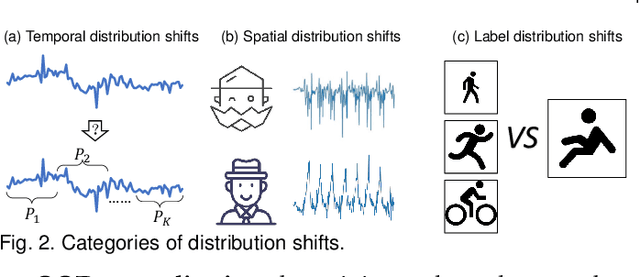
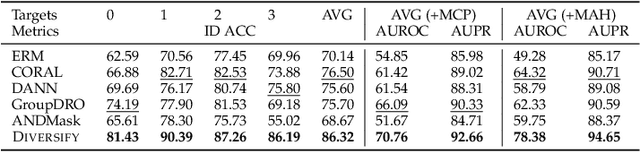
Time series remains one of the most challenging modalities in machine learning research. The out-of-distribution (OOD) detection and generalization on time series tend to suffer due to its non-stationary property, i.e., the distribution changes over time. The dynamic distributions inside time series pose great challenges to existing algorithms to identify invariant distributions since they mainly focus on the scenario where the domain information is given as prior knowledge. In this paper, we attempt to exploit subdomains within a whole dataset to counteract issues induced by non-stationary for generalized representation learning. We propose DIVERSIFY, a general framework, for OOD detection and generalization on dynamic distributions of time series. DIVERSIFY takes an iterative process: it first obtains the "worst-case" latent distribution scenario via adversarial training, then reduces the gap between these latent distributions. We implement DIVERSIFY via combining existing OOD detection methods according to either extracted features or outputs of models for detection while we also directly utilize outputs for classification. In addition, theoretical insights illustrate that DIVERSIFY is theoretically supported. Extensive experiments are conducted on seven datasets with different OOD settings across gesture recognition, speech commands recognition, wearable stress and affect detection, and sensor-based human activity recognition. Qualitative and quantitative results demonstrate that DIVERSIFY learns more generalized features and significantly outperforms other baselines.
Predicting Temperature of Major Cities Using Machine Learning and Deep Learning
Sep 23, 2023Currently, the issue that concerns the world leaders most is climate change for its effect on agriculture, environment and economies of daily life. So, to combat this, temperature prediction with strong accuracy is vital. So far, the most effective widely used measure for such forecasting is Numerical weather prediction (NWP) which is a mathematical model that needs broad data from different applications to make predictions. This expensive, time and labor consuming work can be minimized through making such predictions using Machine learning algorithms. Using the database made by University of Dayton which consists the change of temperature in major cities we used the Time Series Analysis method where we use LSTM for the purpose of turning existing data into a tool for future prediction. LSTM takes the long-term data as well as any short-term exceptions or anomalies that may have occurred and calculates trend, seasonality and the stationarity of a data. By using models such as ARIMA, SARIMA, Prophet with the concept of RNN and LSTM we can, filter out any abnormalities, preprocess the data compare it with previous trends and make a prediction of future trends. Also, seasonality and stationarity help us analyze the reoccurrence or repeat over one year variable and removes the constrain of time in which the data was dependent so see the general changes that are predicted. By doing so we managed to make prediction of the temperature of different cities during any time in future based on available data and built a method of accurate prediction. This document contains our methodology for being able to make such predictions.
Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments
Sep 30, 2023
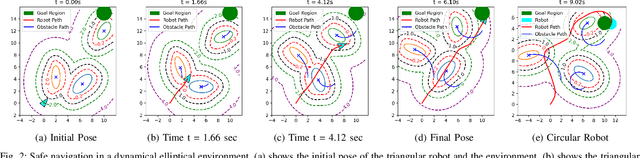
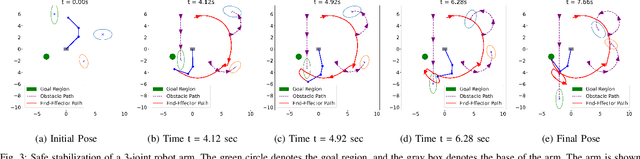
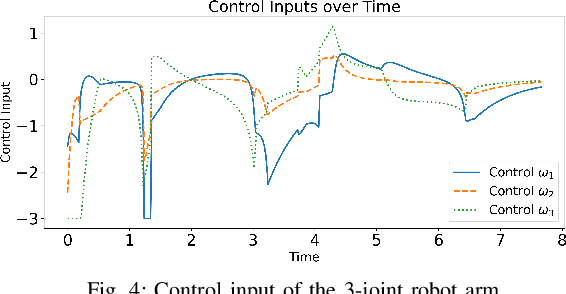
This paper addresses the challenge of safe navigation for rigid-body mobile robots in dynamic environments. We introduce an analytic approach to compute the distance between a polygon and an ellipse, and employ it to construct a control barrier function (CBF) for safe control synthesis. Existing CBF design methods for mobile robot obstacle avoidance usually assume point or circular robots, preventing their applicability to more realistic robot body geometries. Our work enables CBF designs that capture complex robot and obstacle shapes. We demonstrate the effectiveness of our approach in simulations highlighting real-time obstacle avoidance in constrained and dynamic environments for both mobile robots and multi-joint robot arms.