 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Video-Helpful Multimodal Machine Translation
Oct 31, 2023
Existing multimodal machine translation (MMT) datasets consist of images and video captions or instructional video subtitles, which rarely contain linguistic ambiguity, making visual information ineffective in generating appropriate translations. Recent work has constructed an ambiguous subtitles dataset to alleviate this problem but is still limited to the problem that videos do not necessarily contribute to disambiguation. We introduce EVA (Extensive training set and Video-helpful evaluation set for Ambiguous subtitles translation), an MMT dataset containing 852k Japanese-English (Ja-En) parallel subtitle pairs, 520k Chinese-English (Zh-En) parallel subtitle pairs, and corresponding video clips collected from movies and TV episodes. In addition to the extensive training set, EVA contains a video-helpful evaluation set in which subtitles are ambiguous, and videos are guaranteed helpful for disambiguation. Furthermore, we propose SAFA, an MMT model based on the Selective Attention model with two novel methods: Frame attention loss and Ambiguity augmentation, aiming to use videos in EVA for disambiguation fully. Experiments on EVA show that visual information and the proposed methods can boost translation performance, and our model performs significantly better than existing MMT models. The EVA dataset and the SAFA model are available at: https://github.com/ku-nlp/video-helpful-MMT.git.
Generalized zero-shot audio-to-intent classification
Nov 04, 2023Spoken language understanding systems using audio-only data are gaining popularity, yet their ability to handle unseen intents remains limited. In this study, we propose a generalized zero-shot audio-to-intent classification framework with only a few sample text sentences per intent. To achieve this, we first train a supervised audio-to-intent classifier by making use of a self-supervised pre-trained model. We then leverage a neural audio synthesizer to create audio embeddings for sample text utterances and perform generalized zero-shot classification on unseen intents using cosine similarity. We also propose a multimodal training strategy that incorporates lexical information into the audio representation to improve zero-shot performance. Our multimodal training approach improves the accuracy of zero-shot intent classification on unseen intents of SLURP by 2.75% and 18.2% for the SLURP and internal goal-oriented dialog datasets, respectively, compared to audio-only training.
Exploring Deep Learning Image Super-Resolution for Iris Recognition
Nov 02, 2023In this work we test the ability of deep learning methods to provide an end-to-end mapping between low and high resolution images applying it to the iris recognition problem. Here, we propose the use of two deep learning single-image super-resolution approaches: Stacked Auto-Encoders (SAE) and Convolutional Neural Networks (CNN) with the most possible lightweight structure to achieve fast speed, preserve local information and reduce artifacts at the same time. We validate the methods with a database of 1.872 near-infrared iris images with quality assessment and recognition experiments showing the superiority of deep learning approaches over the compared algorithms.
Multiple Object Tracking based on Occlusion-Aware Embedding Consistency Learning
Nov 05, 2023The Joint Detection and Embedding (JDE) framework has achieved remarkable progress for multiple object tracking. Existing methods often employ extracted embeddings to re-establish associations between new detections and previously disrupted tracks. However, the reliability of embeddings diminishes when the region of the occluded object frequently contains adjacent objects or clutters, especially in scenarios with severe occlusion. To alleviate this problem, we propose a novel multiple object tracking method based on visual embedding consistency, mainly including: 1) Occlusion Prediction Module (OPM) and 2) Occlusion-Aware Association Module (OAAM). The OPM predicts occlusion information for each true detection, facilitating the selection of valid samples for consistency learning of the track's visual embedding. The OAAM leverages occlusion cues and visual embeddings to generate two separate embeddings for each track, guaranteeing consistency in both unoccluded and occluded detections. By integrating these two modules, our method is capable of addressing track interruptions caused by occlusion in online tracking scenarios. Extensive experimental results demonstrate that our approach achieves promising performance levels in both unoccluded and occluded tracking scenarios.
The Background Also Matters: Background-Aware Motion-Guided Objects Discovery
Nov 05, 2023Recent works have shown that objects discovery can largely benefit from the inherent motion information in video data. However, these methods lack a proper background processing, resulting in an over-segmentation of the non-object regions into random segments. This is a critical limitation given the unsupervised setting, where object segments and noise are not distinguishable. To address this limitation we propose BMOD, a Background-aware Motion-guided Objects Discovery method. Concretely, we leverage masks of moving objects extracted from optical flow and design a learning mechanism to extend them to the true foreground composed of both moving and static objects. The background, a complementary concept of the learned foreground class, is then isolated in the object discovery process. This enables a joint learning of the objects discovery task and the object/non-object separation. The conducted experiments on synthetic and real-world datasets show that integrating our background handling with various cutting-edge methods brings each time a considerable improvement. Specifically, we improve the objects discovery performance with a large margin, while establishing a strong baseline for object/non-object separation.
Adaptive Latent Diffusion Model for 3D Medical Image to Image Translation: Multi-modal Magnetic Resonance Imaging Study
Nov 01, 2023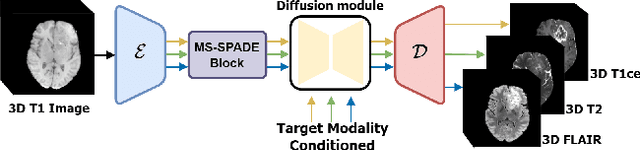
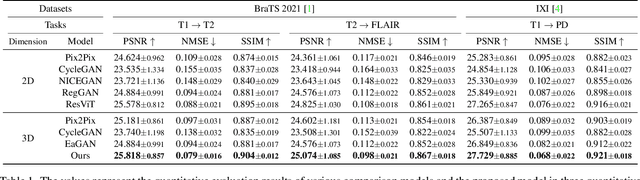

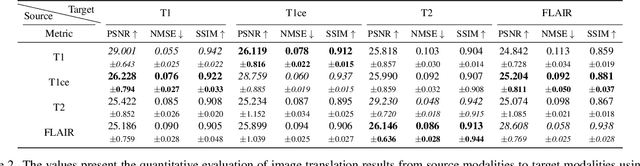
Multi-modal images play a crucial role in comprehensive evaluations in medical image analysis providing complementary information for identifying clinically important biomarkers. However, in clinical practice, acquiring multiple modalities can be challenging due to reasons such as scan cost, limited scan time, and safety considerations. In this paper, we propose a model based on the latent diffusion model (LDM) that leverages switchable blocks for image-to-image translation in 3D medical images without patch cropping. The 3D LDM combined with conditioning using the target modality allows generating high-quality target modality in 3D overcoming the shortcoming of the missing out-of-slice information in 2D generation methods. The switchable block, noted as multiple switchable spatially adaptive normalization (MS-SPADE), dynamically transforms source latents to the desired style of the target latents to help with the diffusion process. The MS-SPADE block allows us to have one single model to tackle many translation tasks of one source modality to various targets removing the need for many translation models for different scenarios. Our model exhibited successful image synthesis across different source-target modality scenarios and surpassed other models in quantitative evaluations tested on multi-modal brain magnetic resonance imaging datasets of four different modalities and an independent IXI dataset. Our model demonstrated successful image synthesis across various modalities even allowing for one-to-many modality translations. Furthermore, it outperformed other one-to-one translation models in quantitative evaluations.
CAD -- Contextual Multi-modal Alignment for Dynamic AVQA
Oct 27, 2023In the context of Audio Visual Question Answering (AVQA) tasks, the audio visual modalities could be learnt on three levels: 1) Spatial, 2) Temporal, and 3) Semantic. Existing AVQA methods suffer from two major shortcomings; the audio-visual (AV) information passing through the network isn't aligned on Spatial and Temporal levels; and, inter-modal (audio and visual) Semantic information is often not balanced within a context; this results in poor performance. In this paper, we propose a novel end-to-end Contextual Multi-modal Alignment (CAD) network that addresses the challenges in AVQA methods by i) introducing a parameter-free stochastic Contextual block that ensures robust audio and visual alignment on the Spatial level; ii) proposing a pre-training technique for dynamic audio and visual alignment on Temporal level in a self-supervised setting, and iii) introducing a cross-attention mechanism to balance audio and visual information on Semantic level. The proposed novel CAD network improves the overall performance over the state-of-the-art methods on average by 9.4% on the MUSIC-AVQA dataset. We also demonstrate that our proposed contributions to AVQA can be added to the existing methods to improve their performance without additional complexity requirements.
Collaborative Large Language Model for Recommender Systems
Nov 08, 2023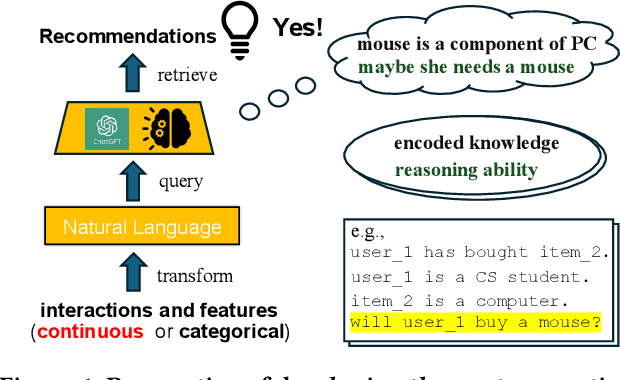
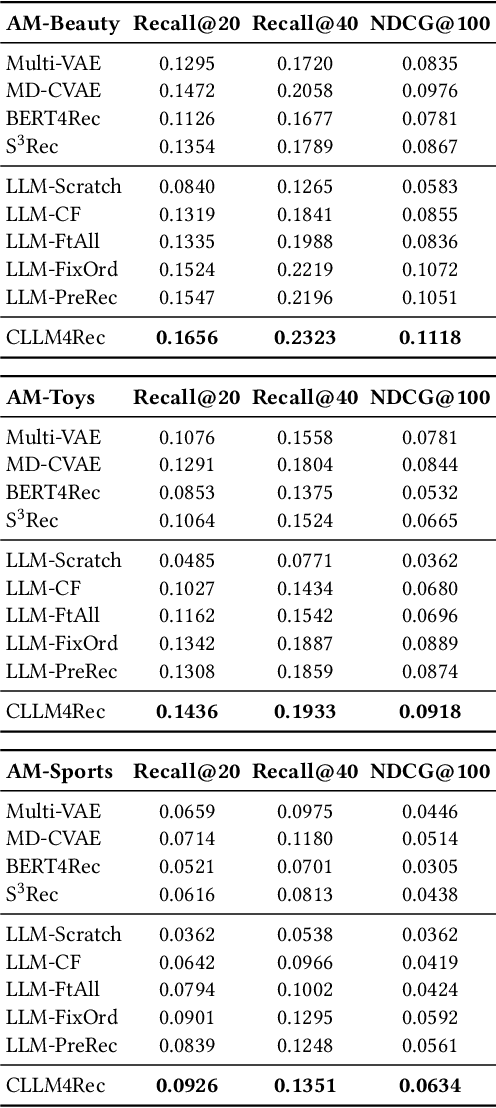
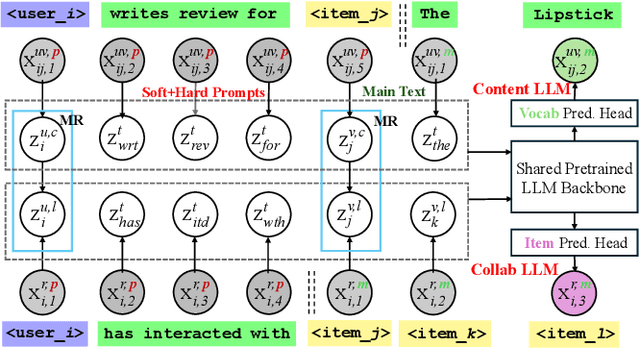
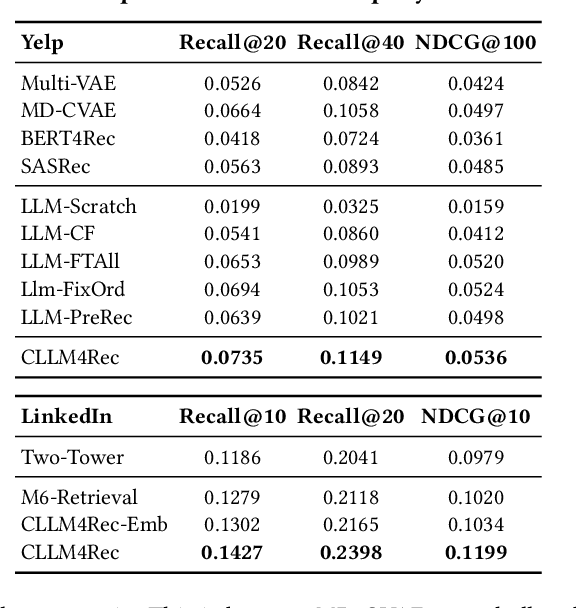
Recently, there is a growing interest in developing next-generation recommender systems (RSs) based on pretrained large language models (LLMs), fully utilizing their encoded knowledge and reasoning ability. However, the semantic gap between natural language and recommendation tasks is still not well addressed, leading to multiple issues such as spuriously-correlated user/item descriptors, ineffective language modeling on user/item contents, and inefficient recommendations via auto-regression, etc. In this paper, we propose CLLM4Rec, the first generative RS that tightly integrates the LLM paradigm and ID paradigm of RS, aiming to address the above challenges simultaneously. We first extend the vocabulary of pretrained LLMs with user/item ID tokens to faithfully model the user/item collaborative and content semantics. Accordingly, in the pretraining stage, a novel soft+hard prompting strategy is proposed to effectively learn user/item collaborative/content token embeddings via language modeling on RS-specific corpora established from user-item interactions and user/item features, where each document is split into a prompt consisting of heterogeneous soft (user/item) tokens and hard (vocab) tokens and a main text consisting of homogeneous item tokens or vocab tokens that facilitates stable and effective language modeling. In addition, a novel mutual regularization strategy is introduced to encourage the CLLM4Rec to capture recommendation-oriented information from user/item contents. Finally, we propose a novel recommendation-oriented finetuning strategy for CLLM4Rec, where an item prediction head with multinomial likelihood is added to the pretrained CLLM4Rec backbone to predict hold-out items based on the soft+hard prompts established from masked user-item interaction history, where recommendations of multiple items can be generated efficiently.
Rethinking Event-based Human Pose Estimation with 3D Event Representations
Nov 08, 2023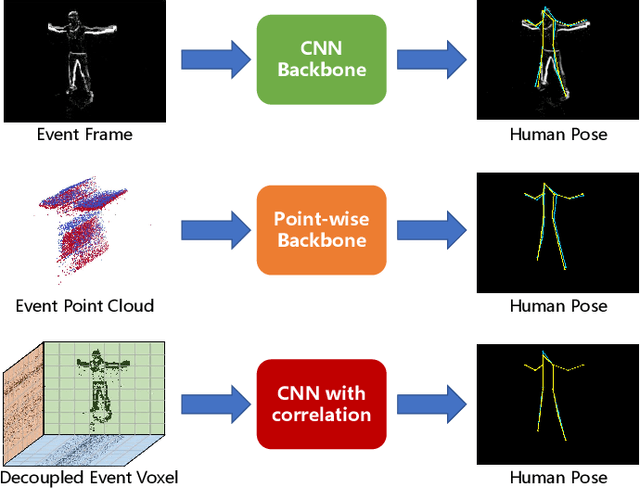
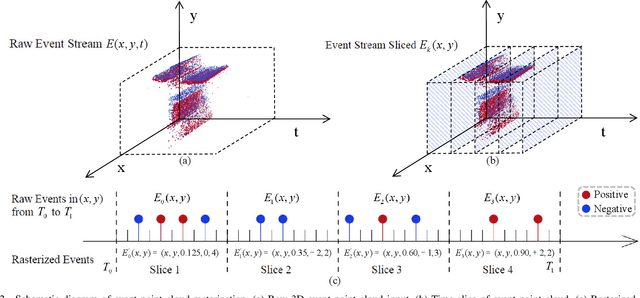
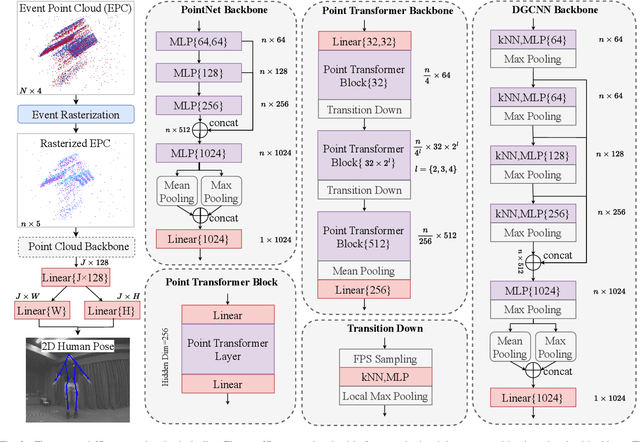
Human pose estimation is a critical component in autonomous driving and parking, enhancing safety by predicting human actions. Traditional frame-based cameras and videos are commonly applied, yet, they become less reliable in scenarios under high dynamic range or heavy motion blur. In contrast, event cameras offer a robust solution for navigating these challenging contexts. Predominant methodologies incorporate event cameras into learning frameworks by accumulating events into event frames. However, such methods tend to marginalize the intrinsic asynchronous and high temporal resolution characteristics of events. This disregard leads to a loss in essential temporal dimension data, crucial for safety-critical tasks associated with dynamic human activities. To address this issue and to unlock the 3D potential of event information, we introduce two 3D event representations: the Rasterized Event Point Cloud (RasEPC) and the Decoupled Event Voxel (DEV). The RasEPC collates events within concise temporal slices at identical positions, preserving 3D attributes with statistical cues and markedly mitigating memory and computational demands. Meanwhile, the DEV representation discretizes events into voxels and projects them across three orthogonal planes, utilizing decoupled event attention to retrieve 3D cues from the 2D planes. Furthermore, we develop and release EV-3DPW, a synthetic event-based dataset crafted to facilitate training and quantitative analysis in outdoor scenes. On the public real-world DHP19 dataset, our event point cloud technique excels in real-time mobile predictions, while the decoupled event voxel method achieves the highest accuracy. Experiments reveal our proposed 3D representation methods' superior generalization capacities against traditional RGB images and event frame techniques. Our code and dataset are available at https://github.com/MasterHow/EventPointPose.
Lidar Annotation Is All You Need
Nov 08, 2023In recent years, computer vision has transformed fields such as medical imaging, object recognition, and geospatial analytics. One of the fundamental tasks in computer vision is semantic image segmentation, which is vital for precise object delineation. Autonomous driving represents one of the key areas where computer vision algorithms are applied. The task of road surface segmentation is crucial in self-driving systems, but it requires a labor-intensive annotation process in several data domains. The work described in this paper aims to improve the efficiency of image segmentation using a convolutional neural network in a multi-sensor setup. This approach leverages lidar (Light Detection and Ranging) annotations to directly train image segmentation models on RGB images. Lidar supplements the images by emitting laser pulses and measuring reflections to provide depth information. However, lidar's sparse point clouds often create difficulties for accurate object segmentation. Segmentation of point clouds requires time-consuming preliminary data preparation and a large amount of computational resources. The key innovation of our approach is the masked loss, addressing sparse ground-truth masks from point clouds. By calculating loss exclusively where lidar points exist, the model learns road segmentation on images by using lidar points as ground truth. This approach allows for blending of different ground-truth data types during model training. Experimental validation of the approach on benchmark datasets shows comparable performance to a high-quality image segmentation model. Incorporating lidar reduces the load on annotations and enables training of image-segmentation models without loss of segmentation quality. The methodology is tested on diverse datasets, both publicly available and proprietary. The strengths and weaknesses of the proposed method are also discussed in the paper.