 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Exploring Nature: Datasets and Models for Analyzing Nature-Related Disclosures
Dec 28, 2023
Nature is an amorphous concept. Yet, it is essential for the planet's well-being to understand how the economy interacts with it. To address the growing demand for information on corporate nature disclosure, we provide datasets and classifiers to detect nature communication by companies. We ground our approach in the guidelines of the Taskforce on Nature-related Financial Disclosures (TNFD). Particularly, we focus on the specific dimensions of water, forest, and biodiversity. For each dimension, we create an expert-annotated dataset with 2,200 text samples and train classifier models. Furthermore, we show that nature communication is more prevalent in hotspot areas and directly effected industries like agriculture and utilities. Our approach is the first to respond to calls to assess corporate nature communication on a large scale.
LaneSegNet: Map Learning with Lane Segment Perception for Autonomous Driving
Dec 26, 2023A map, as crucial information for downstream applications of an autonomous driving system, is usually represented in lanelines or centerlines. However, existing literature on map learning primarily focuses on either detecting geometry-based lanelines or perceiving topology relationships of centerlines. Both of these methods ignore the intrinsic relationship of lanelines and centerlines, that lanelines bind centerlines. While simply predicting both types of lane in one model is mutually excluded in learning objective, we advocate lane segment as a new representation that seamlessly incorporates both geometry and topology information. Thus, we introduce LaneSegNet, the first end-to-end mapping network generating lane segments to obtain a complete representation of the road structure. Our algorithm features two key modifications. One is a lane attention module to capture pivotal region details within the long-range feature space. Another is an identical initialization strategy for reference points, which enhances the learning of positional priors for lane attention. On the OpenLane-V2 dataset, LaneSegNet outperforms previous counterparts by a substantial gain across three tasks, \textit{i.e.}, map element detection (+4.8 mAP), centerline perception (+6.9 DET$_l$), and the newly defined one, lane segment perception (+5.6 mAP). Furthermore, it obtains a real-time inference speed of 14.7 FPS. Code is accessible at https://github.com/OpenDriveLab/LaneSegNet.
Decoupling SQL Query Hardness Parsing for Text-to-SQL
Dec 29, 2023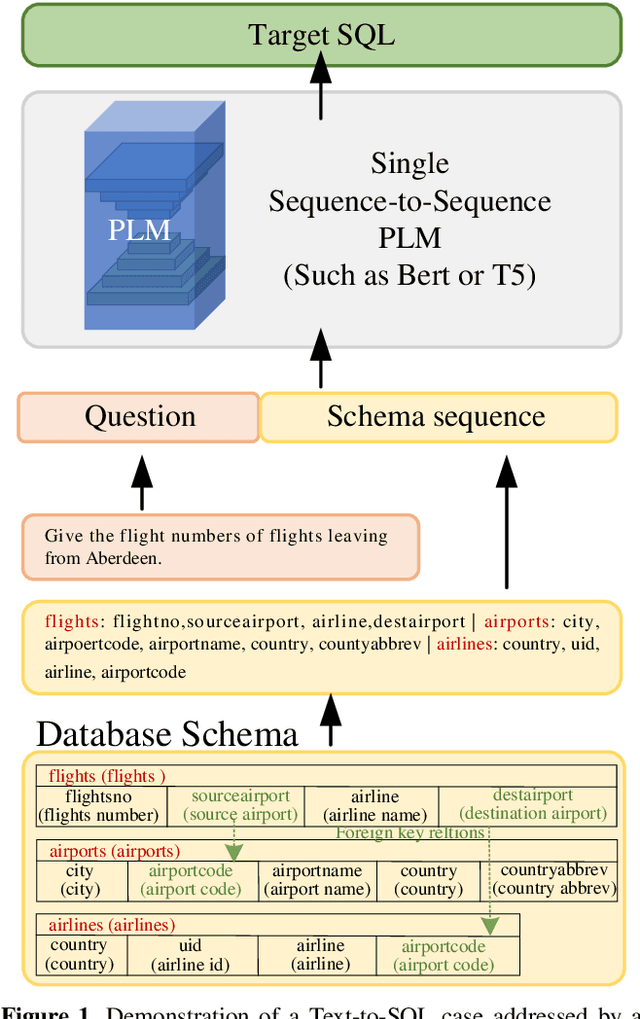
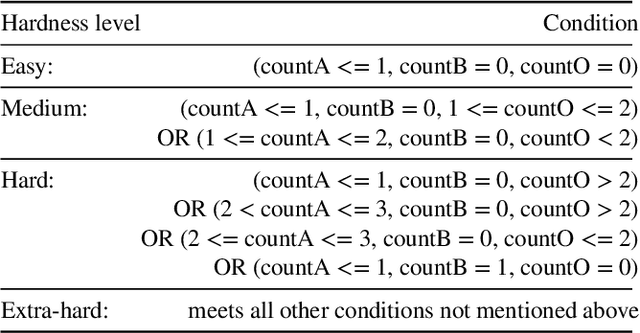
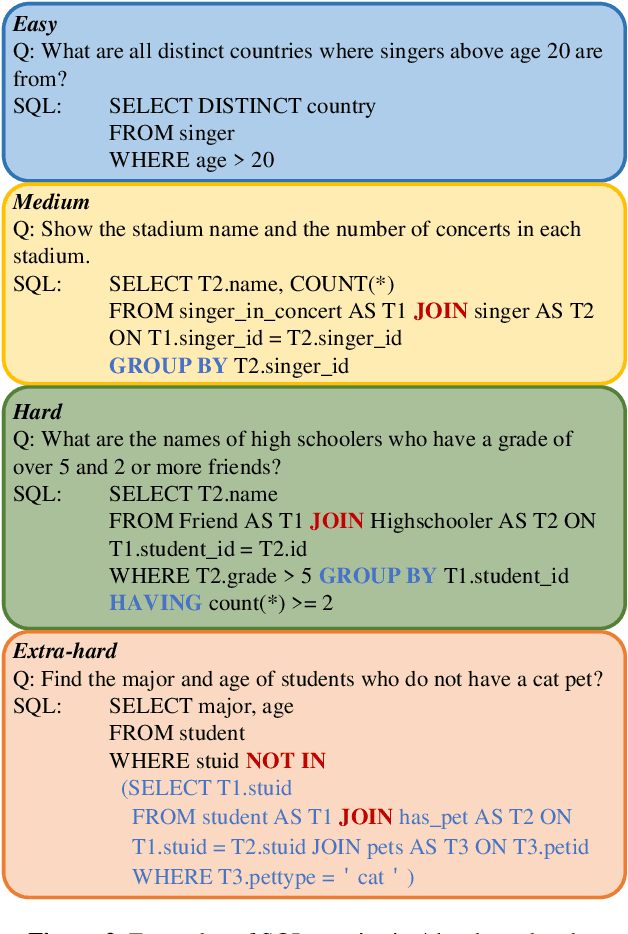
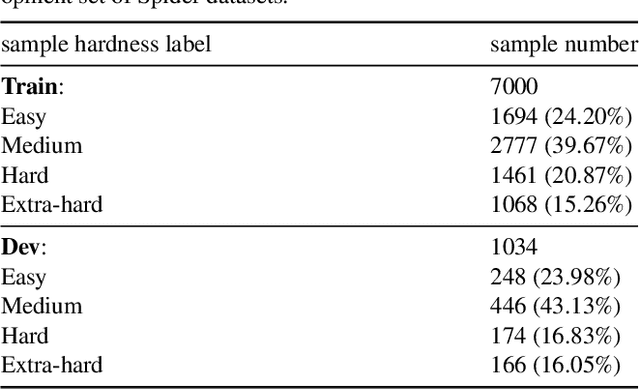
The fundamental goal of the Text-to-SQL task is to translate natural language question into SQL query. Current research primarily emphasizes the information coupling between natural language questions and schemas, and significant progress has been made in this area. The natural language questions as the primary task requirements source determines the hardness of correspond SQL queries, the correlation between the two always be ignored. However, when the correlation between questions and queries was decoupled, it may simplify the task. In this paper, we introduce an innovative framework for Text-to-SQL based on decoupling SQL query hardness parsing. This framework decouples the Text-to-SQL task based on query hardness by analyzing questions and schemas, simplifying the multi-hardness task into a single-hardness challenge. This greatly reduces the parsing pressure on the language model. We evaluate our proposed framework and achieve a new state-of-the-art performance of fine-turning methods on Spider dev.
Accent-VITS:accent transfer for end-to-end TTS
Dec 29, 2023Accent transfer aims to transfer an accent from a source speaker to synthetic speech in the target speaker's voice. The main challenge is how to effectively disentangle speaker timbre and accent which are entangled in speech. This paper presents a VITS-based end-to-end accent transfer model named Accent-VITS.Based on the main structure of VITS, Accent-VITS makes substantial improvements to enable effective and stable accent transfer.We leverage a hierarchical CVAE structure to model accent pronunciation information and acoustic features, respectively, using bottleneck features and mel spectrums as constraints.Moreover, the text-to-wave mapping in VITS is decomposed into text-to-accent and accent-to-wave mappings in Accent-VITS. In this way, the disentanglement of accent and speaker timbre becomes be more stable and effective.Experiments on multi-accent and Mandarin datasets show that Accent-VITS achieves higher speaker similarity, accent similarity and speech naturalness as compared with a strong baseline.
DarkShot: Lighting Dark Images with Low-Compute and High-Quality
Dec 29, 2023Nighttime photography encounters escalating challenges in extremely low-light conditions, primarily attributable to the ultra-low signal-to-noise ratio. For real-world deployment, a practical solution must not only produce visually appealing results but also require minimal computation. However, most existing methods are either focused on improving restoration performance or employ lightweight models at the cost of quality. This paper proposes a lightweight network that outperforms existing state-of-the-art (SOTA) methods in low-light enhancement tasks while minimizing computation. The proposed network incorporates Siamese Self-Attention Block (SSAB) and Skip-Channel Attention (SCA) modules, which enhance the model's capacity to aggregate global information and are well-suited for high-resolution images. Additionally, based on our analysis of the low-light image restoration process, we propose a Two-Stage Framework that achieves superior results. Our model can restore a UHD 4K resolution image with minimal computation while keeping SOTA restoration quality.
K-PERM: Personalized Response Generation Using Dynamic Knowledge Retrieval and Persona-Adaptive Queries
Dec 29, 2023Personalizing conversational agents can enhance the quality of conversations and increase user engagement. However, they often lack external knowledge to appropriately tend to a user's persona. This is particularly crucial for practical applications like mental health support, nutrition planning, culturally sensitive conversations, or reducing toxic behavior in conversational agents. To enhance the relevance and comprehensiveness of personalized responses, we propose using a two-step approach that involves (1) selectively integrating user personas and (2) contextualizing the response with supplementing information from a background knowledge source. We develop K-PERM (Knowledge-guided PErsonalization with Reward Modulation), a dynamic conversational agent that combines these elements. K-PERM achieves state-of-the-art performance on the popular FoCus dataset, containing real-world personalized conversations concerning global landmarks. We show that using responses from K-PERM can improve performance in state-of-the-art LLMs (GPT 3.5) by 10.5%, highlighting the impact of K-PERM for personalizing chatbots.
Visual Point Cloud Forecasting enables Scalable Autonomous Driving
Dec 29, 2023In contrast to extensive studies on general vision, pre-training for scalable visual autonomous driving remains seldom explored. Visual autonomous driving applications require features encompassing semantics, 3D geometry, and temporal information simultaneously for joint perception, prediction, and planning, posing dramatic challenges for pre-training. To resolve this, we bring up a new pre-training task termed as visual point cloud forecasting - predicting future point clouds from historical visual input. The key merit of this task captures the synergic learning of semantics, 3D structures, and temporal dynamics. Hence it shows superiority in various downstream tasks. To cope with this new problem, we present ViDAR, a general model to pre-train downstream visual encoders. It first extracts historical embeddings by the encoder. These representations are then transformed to 3D geometric space via a novel Latent Rendering operator for future point cloud prediction. Experiments show significant gain in downstream tasks, e.g., 3.1% NDS on 3D detection, ~10% error reduction on motion forecasting, and ~15% less collision rate on planning.
Robust TOA-based Localization with Inaccurate Anchors for MANET
Dec 29, 2023Accurate node localization is vital for mobile ad hoc networks (MANETs). Current methods like Time of Arrival (TOA) can estimate node positions using imprecise baseplates and achieve the Cram\'er-Rao lower bound (CRLB) accuracy. In multi-hop MANETs, some nodes lack direct links to base anchors, depending on neighbor nodes as dynamic anchors for chain localization. However, the dynamic nature of MANETs challenges TOA's robustness due to the availability and accuracy of base anchors, coupled with ranging errors. To address the issue of cascading positioning error divergence, we first derive the CRLB for any primary node in MANETs as a metric to tackle localization error in cascading scenarios. Second, we propose an advanced two-step TOA method based on CRLB which is able to approximate target node's CRLB with only local neighbor information. Finally, simulation results confirm the robustness of our algorithm, achieving CRLB-level accuracy for small ranging errors and maintaining precision for larger errors compared to existing TOA methods.
Enhanced Latent Multi-view Subspace Clustering
Dec 22, 2023Latent multi-view subspace clustering has been demonstrated to have desirable clustering performance. However, the original latent representation method vertically concatenates the data matrices from multiple views into a single matrix along the direction of dimensionality to recover the latent representation matrix, which may result in an incomplete information recovery. To fully recover the latent space representation, we in this paper propose an Enhanced Latent Multi-view Subspace Clustering (ELMSC) method. The ELMSC method involves constructing an augmented data matrix that enhances the representation of multi-view data. Specifically, we stack the data matrices from various views into the block-diagonal locations of the augmented matrix to exploit the complementary information. Meanwhile, the non-block-diagonal entries are composed based on the similarity between different views to capture the consistent information. In addition, we enforce a sparse regularization for the non-diagonal blocks of the augmented self-representation matrix to avoid redundant calculations of consistency information. Finally, a novel iterative algorithm based on the framework of Alternating Direction Method of Multipliers (ADMM) is developed to solve the optimization problem for ELMSC. Extensive experiments on real-world datasets demonstrate that our proposed ELMSC is able to achieve higher clustering performance than some state-of-art multi-view clustering methods.
Images in Discrete Choice Modeling: Addressing Data Isomorphism in Multi-Modality Inputs
Dec 22, 2023This paper explores the intersection of Discrete Choice Modeling (DCM) and machine learning, focusing on the integration of image data into DCM's utility functions and its impact on model interpretability. We investigate the consequences of embedding high-dimensional image data that shares isomorphic information with traditional tabular inputs within a DCM framework. Our study reveals that neural network (NN) components learn and replicate tabular variable representations from images when co-occurrences exist, thereby compromising the interpretability of DCM parameters. We propose and benchmark two methodologies to address this challenge: architectural design adjustments to segregate redundant information, and isomorphic information mitigation through source information masking and inpainting. Our experiments, conducted on a semi-synthetic dataset, demonstrate that while architectural modifications prove inconclusive, direct mitigation at the data source shows to be a more effective strategy in maintaining the integrity of DCM's interpretable parameters. The paper concludes with insights into the applicability of our findings in real-world settings and discusses the implications for future research in hybrid modeling that combines complex data modalities. Full control of tabular and image data congruence is attained by using the MIT moral machine dataset, and both inputs are merged into a choice model by deploying the Learning Multinomial Logit (L-MNL) framework.