 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Astrocyte Regulated Neuromorphic Central Pattern Generator Control of Legged Robotic Locomotion
Jan 05, 2024
Neuromorphic computing systems, where information is transmitted through action potentials in a bio-plausible fashion, is gaining increasing interest due to its promise of low-power event-driven computing. Application of neuromorphic computing in robotic locomotion research have largely focused on Central Pattern Generators (CPGs) for bionics robotic control algorithms - inspired from neural circuits governing the collaboration of the limb muscles in animal movement. Implementation of artificial CPGs on neuromorphic hardware platforms can potentially enable adaptive and energy-efficient edge robotics applications in resource constrained environments. However, underlying rewiring mechanisms in CPG for gait emergence process is not well understood. This work addresses the missing gap in literature pertaining to CPG plasticity and underscores the critical homeostatic functionality of astrocytes - a cellular component in the brain that is believed to play a major role in multiple brain functions. This paper introduces an astrocyte regulated Spiking Neural Network (SNN)-based CPG for learning locomotion gait through Reward-Modulated STDP for quadruped robots, where the astrocytes help build inhibitory connections among the artificial motor neurons in different limbs. The SNN-based CPG is simulated on a multi-object physics simulation platform resulting in the emergence of a trotting gait while running the robot on flat ground. $23.3\times$ computational power savings is observed in comparison to a state-of-the-art reinforcement learning based robot control algorithm. Such a neuroscience-algorithm co-design approach can potentially enable a quantum leap in the functionality of neuromorphic systems incorporating glial cell functionality.
Joint Channel Estimation and Data Recovery for Millimeter Massive MIMO: Using Pilot to Capture Principal Components
Jan 03, 2024Channel state information (CSI) is important to reap the full benefits of millimeter wave (mmWave) massive multiple-input multiple-output (MIMO) systems. The traditional channel estimation methods using pilot frames (PF) lead to excessive overhead. To reduce the demand for PF, data frames (DF) can be adopted for joint channel estimation and data recovery. However, the computational complexity of the DF-based methods is prohibitively high. To reduce the computational complexity, we propose a joint channel estimation and data recovery (JCD) method assisted by a small number of PF for mmWave massive MIMO systems. The proposed method has two stages. In Stage 1, differing from the traditional PF-based methods, the proposed PF-assisted method is utilized to capture the angle of arrival (AoA) of principal components (PC) of channels. In Stage 2, JCD is designed for parallel implementation based on the multi-user decoupling strategy. The theoretical analysis demonstrates that the PF-assisted JCD method can achieve equivalent performance to the Bayesian-optimal DF-based method, while greatly reducing the computational complexity. Simulation results are also presented to validate the analytical results.
Fuzzy Logic Controller Design for Mobile Robot Outdoor Navigation
Jan 03, 2024Many researchers around the world are researching to get control solutions that enhance robots' ability to navigate in dynamic environments autonomously. However, until these days robots have limited capability and many navigation tasks on Earth and other planets have been difficult so far. This paperwork presents the development of a control system for a differential drive-wheeled mobile robot that autonomously controls its position, heading, and speed based on destination information given and surrounding data gathered through mounted proximity and GPS sensors. The intelligence of this control system is implemented by using a fuzzy logic algorithm which is a very powerful tool to handle un-modeled systems like the dynamically changing environment dealt with in this research. The fuzzy controller is used to address the problems associated with navigation in an obstacle-strewn environment. Such issues include position estimation, path planning, and obstacle avoidance. In this study modeling, design, and simulation of the system have been done. The simulation result shows that the developed mobile robot travels successfully from any location to the destination location without colliding with obstacles.
Multichannel blind speech source separation with a disjoint constraint source model
Jan 03, 2024Multichannel convolutive blind speech source separation refers to the problem of separating different speech sources from the observed multichannel mixtures without much a priori information about the mixing system. Multichannel nonnegative matrix factorization (MNMF) has been proven to be one of the most powerful separation frameworks and the representative algorithms such as MNMF and the independent low-rank matrix analysis (ILRMA) have demonstrated great performance. However, the sparseness properties of speech source signals are not fully taken into account in such a framework. It is well known that speech signals are sparse in nature, which is considered in this work to improve the separation performance. Specifically, we utilize the Bingham and Laplace distributions to formulate a disjoint constraint regularizer, which is subsequently incorporated into both MNMF and ILRMA. We then derive majorization-minimization rules for updating parameters related to the source model, resulting in the development of two enhanced algorithms: s-MNMF and s-ILRMA. Comprehensive simulations are conducted, and the results unequivocally demonstrate the efficacy of our proposed methodologies.
Coded Beam Training
Jan 03, 2024In extremely large-scale multiple input multiple output (XL-MIMO) systems for future sixth-generation (6G) communications, codebook-based beam training stands out as a promising technology to acquire channel state information (CSI). Despite their effectiveness, when the pilot overhead is limited, existing beam training methods suffer from significant achievable rate degradation for remote users with low signal-to-noise ratio (SNR). To tackle this challenge, leverging the error-correcting capability of channel codes, we introduce channel coding theory into hierarchical beam training to extend the coverage area. Specifically, we establish the duality between hierarchical beam training and channel coding, and the proposed coded beam training scheme serves as a general framework. Then, we present two specific implementations exemplified by coded beam training methods based on Hamming codes and convolutional codes, during which the beam encoding and decoding processes are refined respectively to better accommodate to the beam training problem. Simulation results have demonstrated that, the proposed coded beam training method can enable reliable beam training performance for remote users with low SNR, while keeping training overhead low.
A Two-Stage Multimodal Emotion Recognition Model Based on Graph Contrastive Learning
Jan 03, 2024In terms of human-computer interaction, it is becoming more and more important to correctly understand the user's emotional state in a conversation, so the task of multimodal emotion recognition (MER) started to receive more attention. However, existing emotion classification methods usually perform classification only once. Sentences are likely to be misclassified in a single round of classification. Previous work usually ignores the similarities and differences between different morphological features in the fusion process. To address the above issues, we propose a two-stage emotion recognition model based on graph contrastive learning (TS-GCL). First, we encode the original dataset with different preprocessing modalities. Second, a graph contrastive learning (GCL) strategy is introduced for these three modal data with other structures to learn similarities and differences within and between modalities. Finally, we use MLP twice to achieve the final emotion classification. This staged classification method can help the model to better focus on different levels of emotional information, thereby improving the performance of the model. Extensive experiments show that TS-GCL has superior performance on IEMOCAP and MELD datasets compared with previous methods.
Improving Intrusion Detection with Domain-Invariant Representation Learning in Latent Space
Jan 02, 2024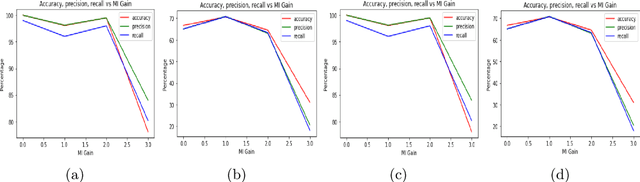
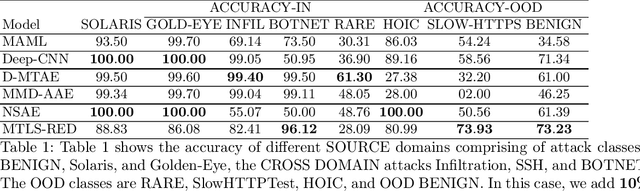
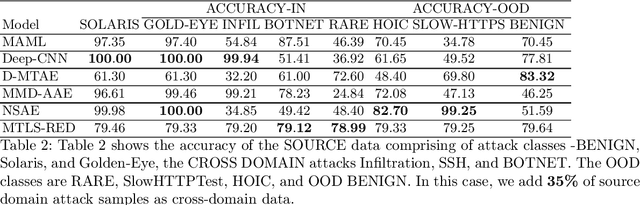
Domain generalization focuses on leveraging knowledge from multiple related domains with ample training data and labels to enhance inference on unseen in-distribution (IN) and out-of-distribution (OOD) domains. In our study, we introduce a two-phase representation learning technique using multi-task learning. This approach aims to cultivate a latent space from features spanning multiple domains, encompassing both native and cross-domains, to amplify generalization to IN and OOD territories. Additionally, we attempt to disentangle the latent space by minimizing the mutual information between the prior and latent space, effectively de-correlating spurious feature correlations. Collectively, the joint optimization will facilitate domain-invariant feature learning. We assess the model's efficacy across multiple cybersecurity datasets, using standard classification metrics on both unseen IN and OOD sets, and juxtapose the results with contemporary domain generalization methods.
NID-SLAM: Neural Implicit Representation-based RGB-D SLAM in dynamic environments
Jan 02, 2024Neural implicit representations have been explored to enhance visual SLAM algorithms, especially in providing high-fidelity dense map. Existing methods operate robustly in static scenes but struggle with the disruption caused by moving objects. In this paper we present NID-SLAM, which significantly improves the performance of neural SLAM in dynamic environments. We propose a new approach to enhance inaccurate regions in semantic masks, particularly in marginal areas. Utilizing the geometric information present in depth images, this method enables accurate removal of dynamic objects, thereby reducing the probability of camera drift. Additionally, we introduce a keyframe selection strategy for dynamic scenes, which enhances camera tracking robustness against large-scale objects and improves the efficiency of mapping. Experiments on publicly available RGB-D datasets demonstrate that our method outperforms competitive neural SLAM approaches in tracking accuracy and mapping quality in dynamic environments.
Distilling Local Texture Features for Colorectal Tissue Classification in Low Data Regimes
Jan 02, 2024Multi-class colorectal tissue classification is a challenging problem that is typically addressed in a setting, where it is assumed that ample amounts of training data is available. However, manual annotation of fine-grained colorectal tissue samples of multiple classes, especially the rare ones like stromal tumor and anal cancer is laborious and expensive. To address this, we propose a knowledge distillation-based approach, named KD-CTCNet, that effectively captures local texture information from few tissue samples, through a distillation loss, to improve the standard CNN features. The resulting enriched feature representation achieves improved classification performance specifically in low data regimes. Extensive experiments on two public datasets of colorectal tissues reveal the merits of the proposed contributions, with a consistent gain achieved over different approaches across low data settings. The code and models are publicly available on GitHub.
BIRB: A Generalization Benchmark for Information Retrieval in Bioacoustics
Dec 13, 2023The ability for a machine learning model to cope with differences in training and deployment conditions--e.g. in the presence of distribution shift or the generalization to new classes altogether--is crucial for real-world use cases. However, most empirical work in this area has focused on the image domain with artificial benchmarks constructed to measure individual aspects of generalization. We present BIRB, a complex benchmark centered on the retrieval of bird vocalizations from passively-recorded datasets given focal recordings from a large citizen science corpus available for training. We propose a baseline system for this collection of tasks using representation learning and a nearest-centroid search. Our thorough empirical evaluation and analysis surfaces open research directions, suggesting that BIRB fills the need for a more realistic and complex benchmark to drive progress on robustness to distribution shifts and generalization of ML models.