 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Shape Prior Non-Uniform Sampling Guided Real-time Stereo 3D Object Detection
Jun 22, 2021
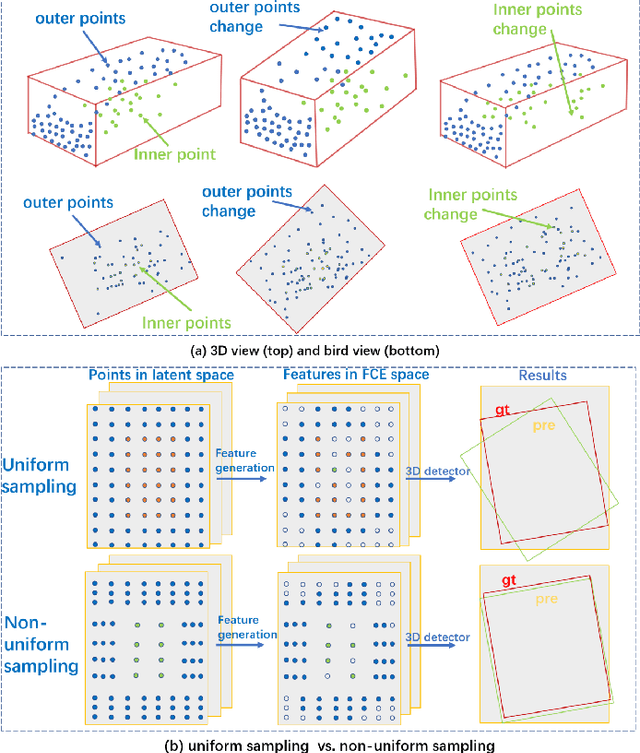
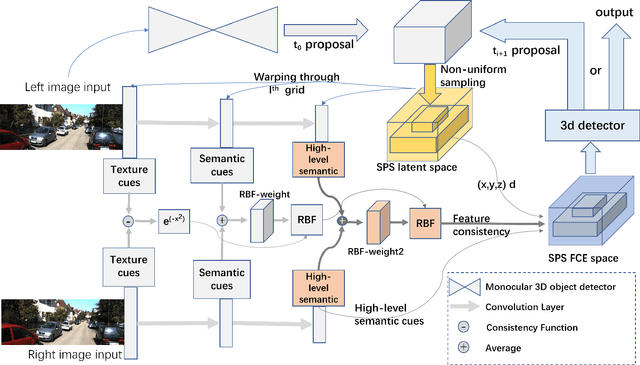
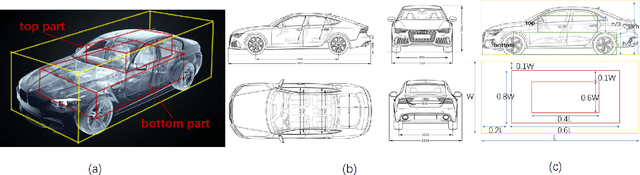
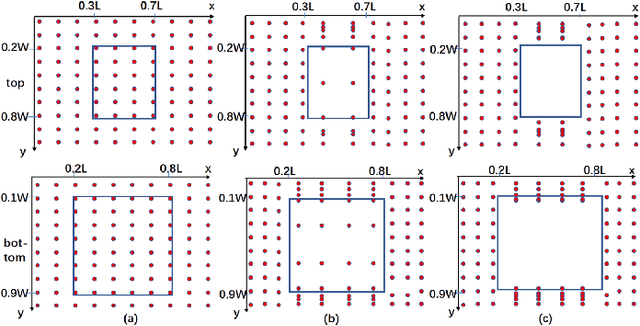
Pseudo-LiDAR based 3D object detectors have gained popularity due to their high accuracy. However, these methods need dense depth supervision and suffer from inferior speed. To solve these two issues, a recently introduced RTS3D builds an efficient 4D Feature-Consistency Embedding (FCE) space for the intermediate representation of object without depth supervision. FCE space splits the entire object region into 3D uniform grid latent space for feature sampling point generation, which ignores the importance of different object regions. However, we argue that, compared with the inner region, the outer region plays a more important role for accurate 3D detection. To encode more information from the outer region, we propose a shape prior non-uniform sampling strategy that performs dense sampling in outer region and sparse sampling in inner region. As a result, more points are sampled from the outer region and more useful features are extracted for 3D detection. Further, to enhance the feature discrimination of each sampling point, we propose a high-level semantic enhanced FCE module to exploit more contextual information and suppress noise better. Experiments on the KITTI dataset are performed to show the effectiveness of the proposed method. Compared with the baseline RTS3D, our proposed method has 2.57% improvement on AP3d almost without extra network parameters. Moreover, our proposed method outperforms the state-of-the-art methods without extra supervision at a real-time speed.
Graph-based Deep Generative Modelling for Document Layout Generation
Jul 09, 2021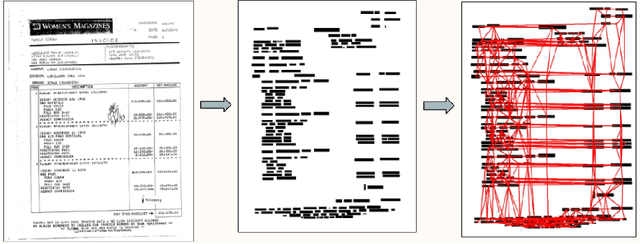

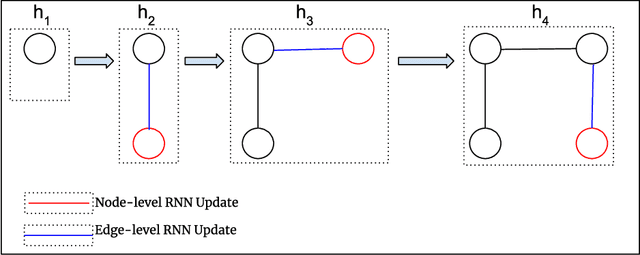
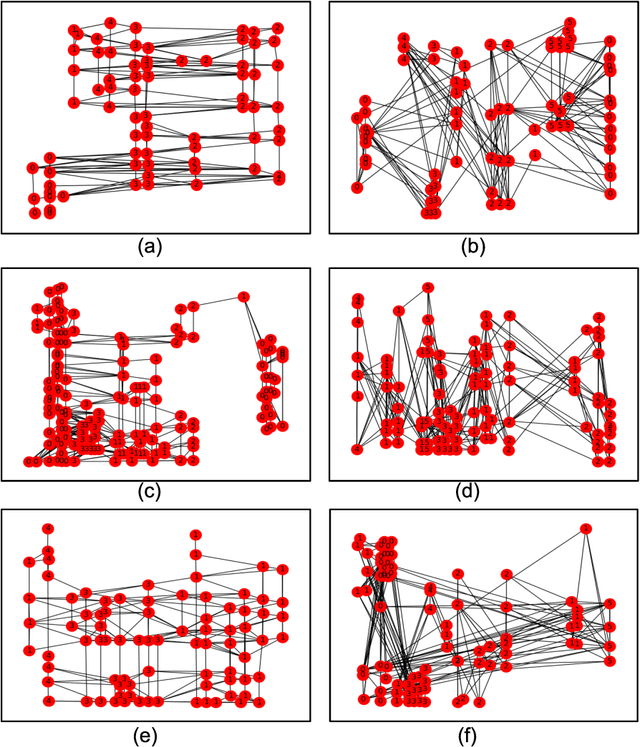
One of the major prerequisites for any deep learning approach is the availability of large-scale training data. When dealing with scanned document images in real world scenarios, the principal information of its content is stored in the layout itself. In this work, we have proposed an automated deep generative model using Graph Neural Networks (GNNs) to generate synthetic data with highly variable and plausible document layouts that can be used to train document interpretation systems, in this case, specially in digital mailroom applications. It is also the first graph-based approach for document layout generation task experimented on administrative document images, in this case, invoices.
Temporal Action Proposal Generation with Transformers
May 25, 2021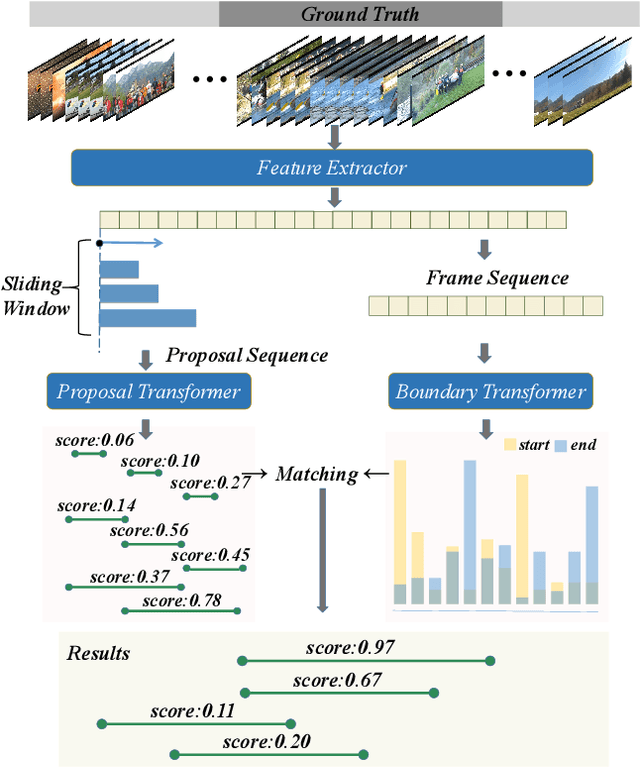
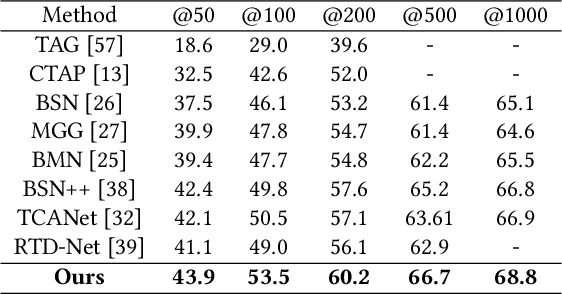
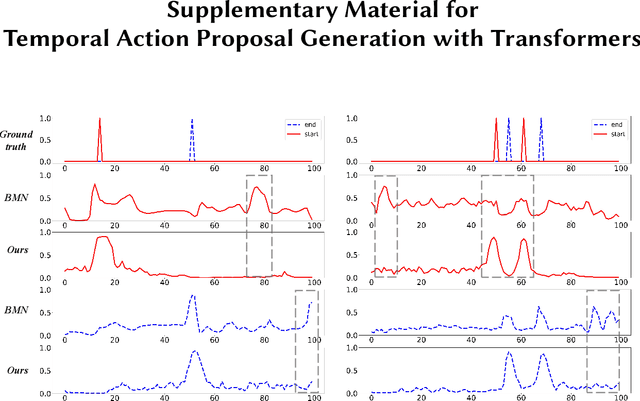
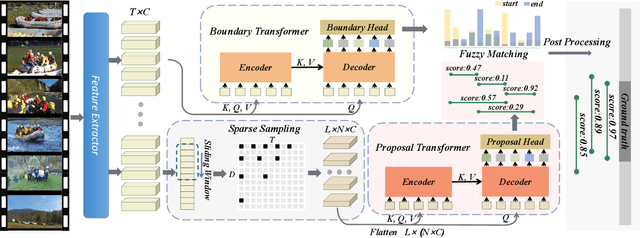
Transformer networks are effective at modeling long-range contextual information and have recently demonstrated exemplary performance in the natural language processing domain. Conventionally, the temporal action proposal generation (TAPG) task is divided into two main sub-tasks: boundary prediction and proposal confidence prediction, which rely on the frame-level dependencies and proposal-level relationships separately. To capture the dependencies at different levels of granularity, this paper intuitively presents a unified temporal action proposal generation framework with original Transformers, called TAPG Transformer, which consists of a Boundary Transformer and a Proposal Transformer. Specifically, the Boundary Transformer captures long-term temporal dependencies to predict precise boundary information and the Proposal Transformer learns the rich inter-proposal relationships for reliable confidence evaluation. Extensive experiments are conducted on two popular benchmarks: ActivityNet-1.3 and THUMOS14, and the results demonstrate that TAPG Transformer outperforms state-of-the-art methods. Equipped with the existing action classifier, our method achieves remarkable performance on the temporal action localization task. Codes and models will be available.
Learning to generate shape from global-local spectra
Aug 04, 2021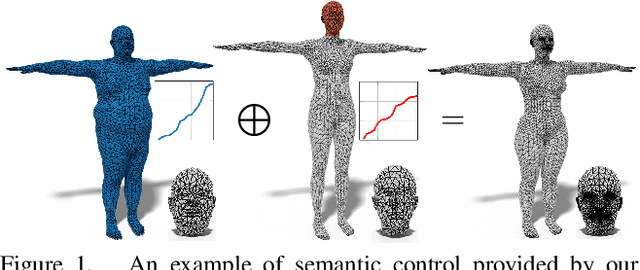
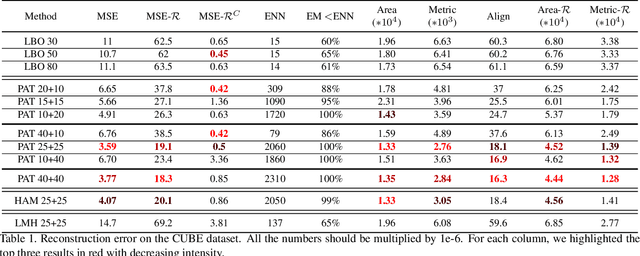
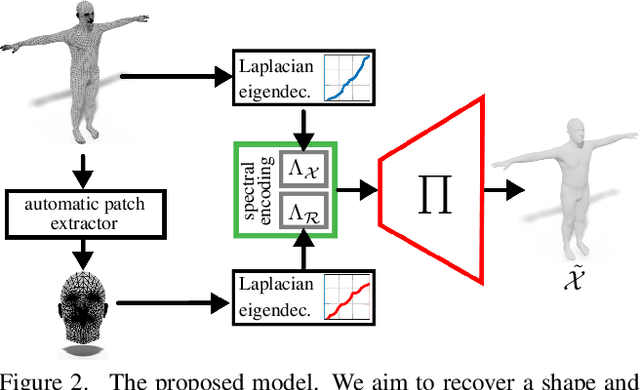
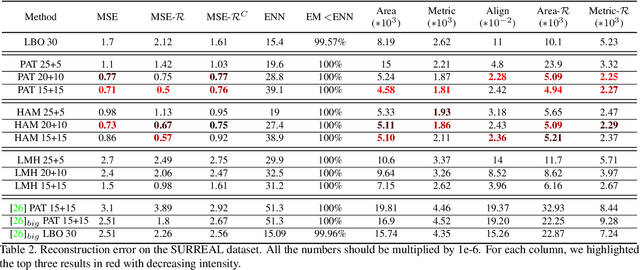
In this work, we present a new learning-based pipeline for the generation of 3D shapes. We build our method on top of recent advances on the so called shape-from-spectrum paradigm, which aims at recovering the full 3D geometric structure of an object only from the eigenvalues of its Laplacian operator. In designing our learning strategy, we consider the spectrum as a natural and ready to use representation to encode variability of the shapes. Therefore, we propose a simple decoder-only architecture that directly maps spectra to 3D embeddings; in particular, we combine information from global and local spectra, the latter being obtained from localized variants of the manifold Laplacian. This combination captures the relations between the full shape and its local parts, leading to more accurate generation of geometric details and an improved semantic control in shape synthesis and novel editing applications. Our results confirm the improvement of the proposed approach in comparison to existing and alternative methods.
Combining Local and Global Viewpoint Planning for Fruit Coverage
Aug 18, 2021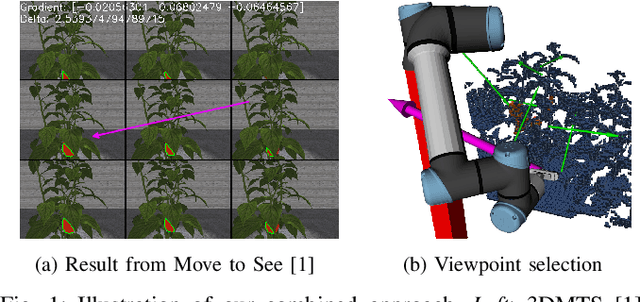
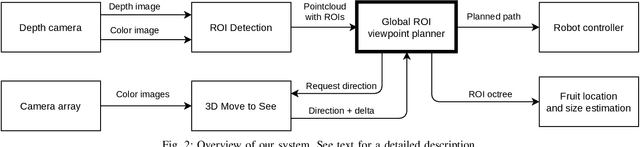
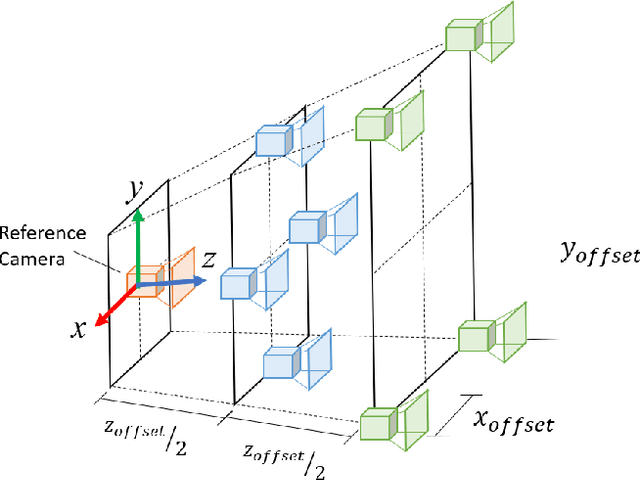
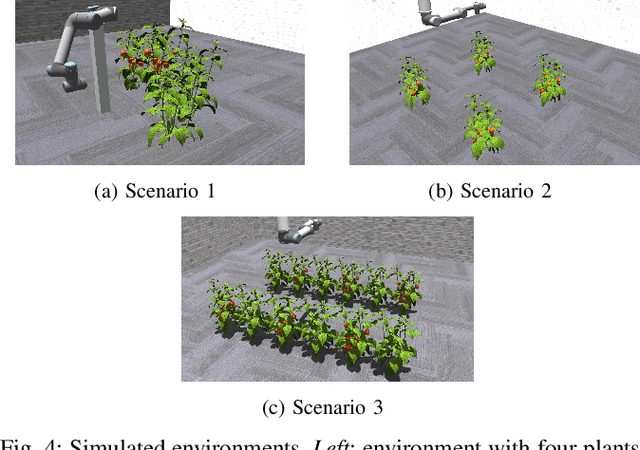
Obtaining 3D sensor data of complete plants or plant parts (e.g., the crop or fruit) is difficult due to their complex structure and a high degree of occlusion. However, especially for the estimation of the position and size of fruits, it is necessary to avoid occlusions as much as possible and acquire sensor information of the relevant parts. Global viewpoint planners exist that suggest a series of viewpoints to cover the regions of interest up to a certain degree, but they usually prioritize global coverage and do not emphasize the avoidance of local occlusions. On the other hand, there are approaches that aim at avoiding local occlusions, but they cannot be used in larger environments since they only reach a local maximum of coverage. In this paper, we therefore propose to combine a local, gradient-based method with global viewpoint planning to enable local occlusion avoidance while still being able to cover large areas. Our simulated experiments with a robotic arm equipped with a camera array as well as an RGB-D camera show that this combination leads to a significantly increased coverage of the regions of interest compared to just applying global coverage planning.
Learning Dynamic Interpolation for Extremely Sparse Light Fields with Wide Baselines
Aug 18, 2021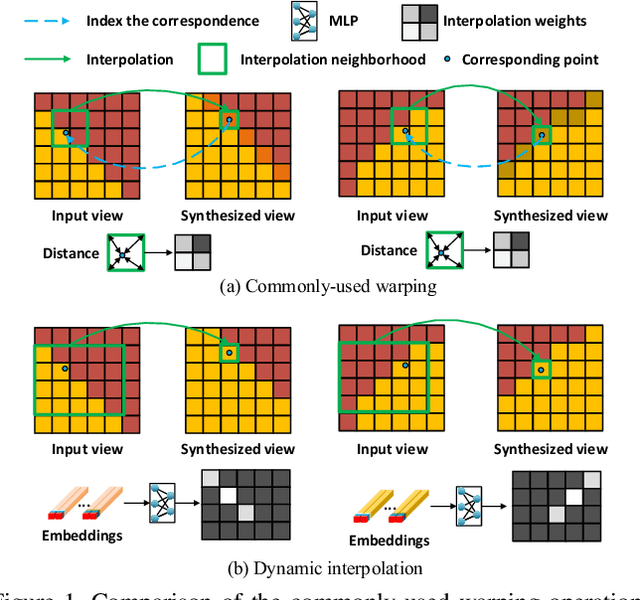
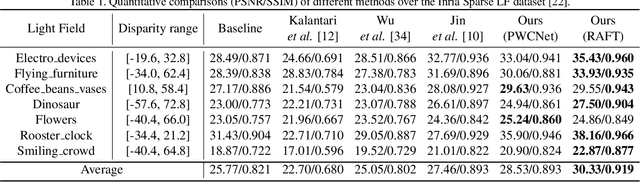
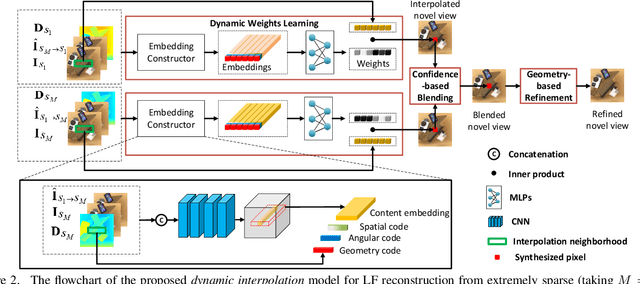
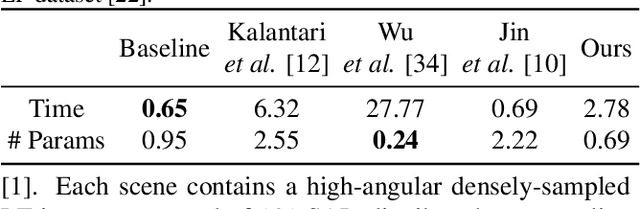
In this paper, we tackle the problem of dense light field (LF) reconstruction from sparsely-sampled ones with wide baselines and propose a learnable model, namely dynamic interpolation, to replace the commonly-used geometry warping operation. Specifically, with the estimated geometric relation between input views, we first construct a lightweight neural network to dynamically learn weights for interpolating neighbouring pixels from input views to synthesize each pixel of novel views independently. In contrast to the fixed and content-independent weights employed in the geometry warping operation, the learned interpolation weights implicitly incorporate the correspondences between the source and novel views and adapt to different image content information. Then, we recover the spatial correlation between the independently synthesized pixels of each novel view by referring to that of input views using a geometry-based spatial refinement module. We also constrain the angular correlation between the novel views through a disparity-oriented LF structure loss. Experimental results on LF datasets with wide baselines show that the reconstructed LFs achieve much higher PSNR/SSIM and preserve the LF parallax structure better than state-of-the-art methods. The source code is publicly available at https://github.com/MantangGuo/DI4SLF.
Multimodal Representation for Neural Code Search
Jul 23, 2021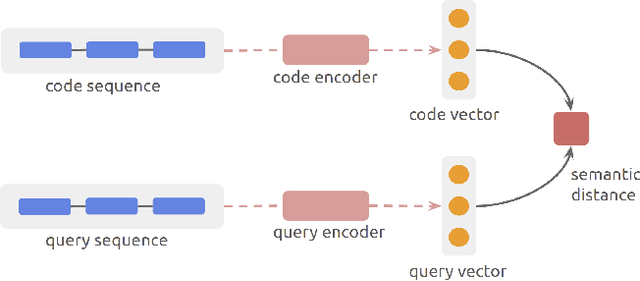
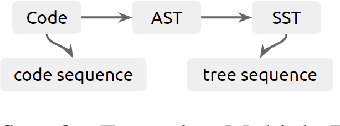
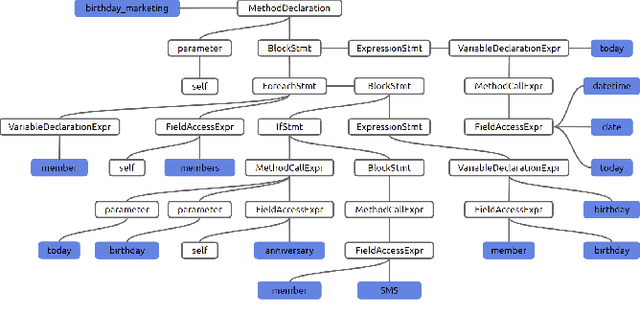
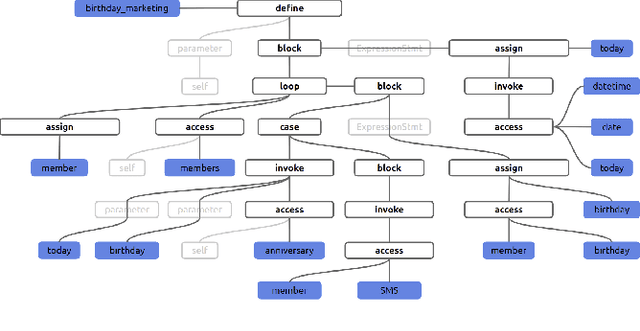
Semantic code search is about finding semantically relevant code snippets for a given natural language query. In the state-of-the-art approaches, the semantic similarity between code and query is quantified as the distance of their representation in the shared vector space. In this paper, to improve the vector space, we introduce tree-serialization methods on a simplified form of AST and build the multimodal representation for the code data. We conduct extensive experiments using a single corpus that is large-scale and multi-language: CodeSearchNet. Our results show that both our tree-serialized representations and multimodal learning model improve the performance of code search. Last, we define intuitive quantification metrics oriented to the completeness of semantic and syntactic information of the code data, to help understand the experimental findings.
Dropout Regularization for Self-Supervised Learning of Transformer Encoder Speech Representation
Jul 09, 2021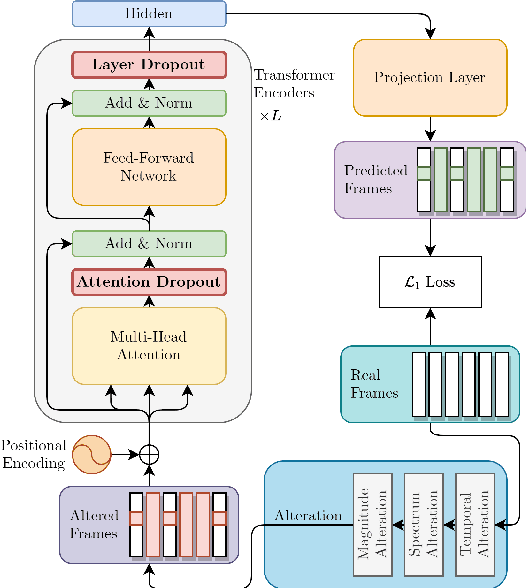
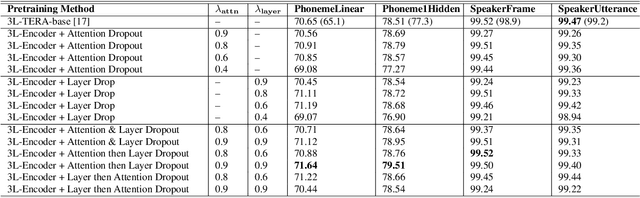

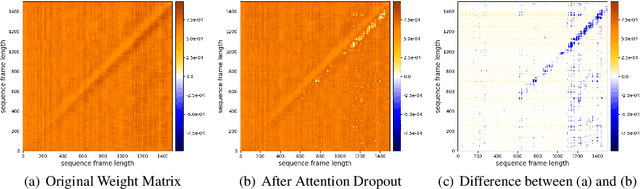
Predicting the altered acoustic frames is an effective way of self-supervised learning for speech representation. However, it is challenging to prevent the pretrained model from overfitting. In this paper, we proposed to introduce two dropout regularization methods into the pretraining of transformer encoder: (1) attention dropout, (2) layer dropout. Both of the two dropout methods encourage the model to utilize global speech information, and avoid just copying local spectrum features when reconstructing the masked frames. We evaluated the proposed methods on phoneme classification and speaker recognition tasks. The experiments demonstrate that our dropout approaches achieve competitive results, and improve the performance of classification accuracy on downstream tasks.
MODETR: Moving Object Detection with Transformers
Jun 21, 2021
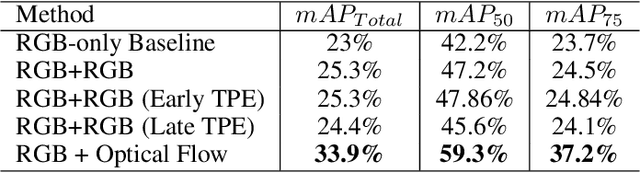

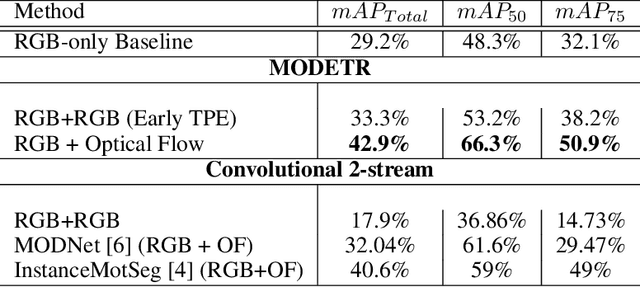
Moving Object Detection (MOD) is a crucial task for the Autonomous Driving pipeline. MOD is usually handled via 2-stream convolutional architectures that incorporates both appearance and motion cues, without considering the inter-relations between the spatial or motion features. In this paper, we tackle this problem through multi-head attention mechanisms, both across the spatial and motion streams. We propose MODETR; a Moving Object DEtection TRansformer network, comprised of multi-stream transformer encoders for both spatial and motion modalities, and an object transformer decoder that produces the moving objects bounding boxes using set predictions. The whole architecture is trained end-to-end using bi-partite loss. Several methods of incorporating motion cues with the Transformer model are explored, including two-stream RGB and Optical Flow (OF) methods, and multi-stream architectures that take advantage of sequence information. To incorporate the temporal information, we propose a new Temporal Positional Encoding (TPE) approach to extend the Spatial Positional Encoding(SPE) in DETR. We explore two architectural choices for that, balancing between speed and time. To evaluate the our network, we perform the MOD task on the KITTI MOD [6] data set. Results show significant 5% mAP of the Transformer network for MOD over the state-of-the art methods. Moreover, the proposed TPE encoding provides 10% mAP improvement over the SPE baseline.
Self-Supervised Graph Learning with Hyperbolic Embedding for Temporal Health Event Prediction
Jun 09, 2021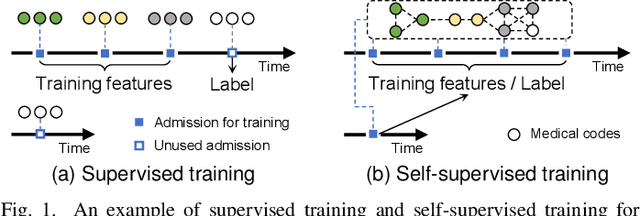
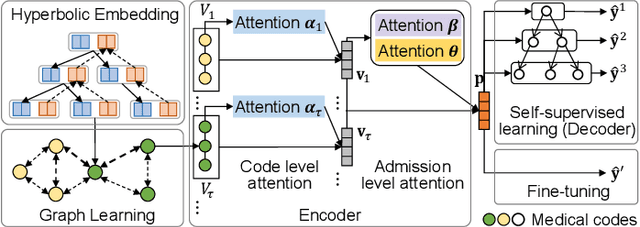
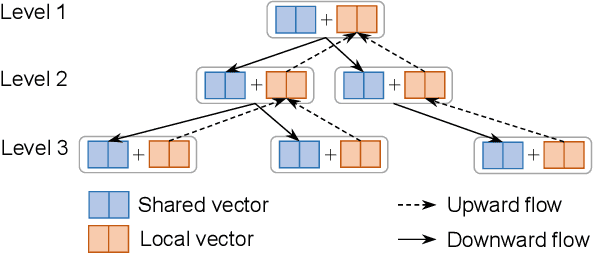
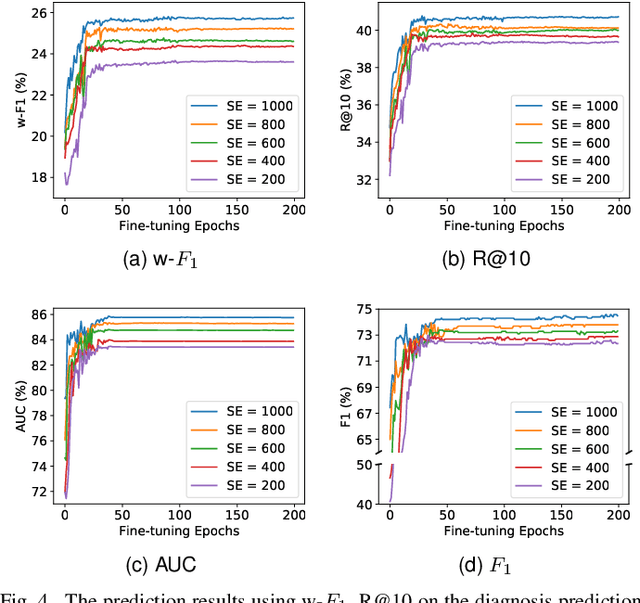
Electronic Health Records (EHR) have been heavily used in modern healthcare systems for recording patients' admission information to hospitals. Many data-driven approaches employ temporal features in EHR for predicting specific diseases, readmission times, or diagnoses of patients. However, most existing predictive models cannot fully utilize EHR data, due to an inherent lack of labels in supervised training for some temporal events. Moreover, it is hard for existing works to simultaneously provide generic and personalized interpretability. To address these challenges, we first propose a hyperbolic embedding method with information flow to pre-train medical code representations in a hierarchical structure. We incorporate these pre-trained representations into a graph neural network to detect disease complications, and design a multi-level attention method to compute the contributions of particular diseases and admissions, thus enhancing personalized interpretability. We present a new hierarchy-enhanced historical prediction proxy task in our self-supervised learning framework to fully utilize EHR data and exploit medical domain knowledge. We conduct a comprehensive set of experiments and case studies on widely used publicly available EHR datasets to verify the effectiveness of our model. The results demonstrate our model's strengths in both predictive tasks and interpretable abilities.