 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Quantifying Uncertainty in Deep Learning Approaches to Radio Galaxy Classification
Jan 24, 2022
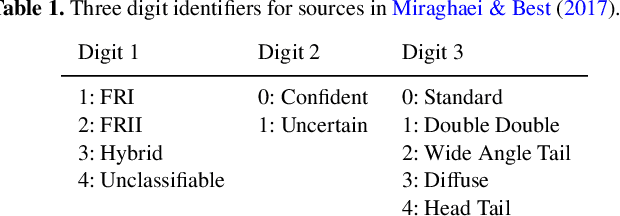
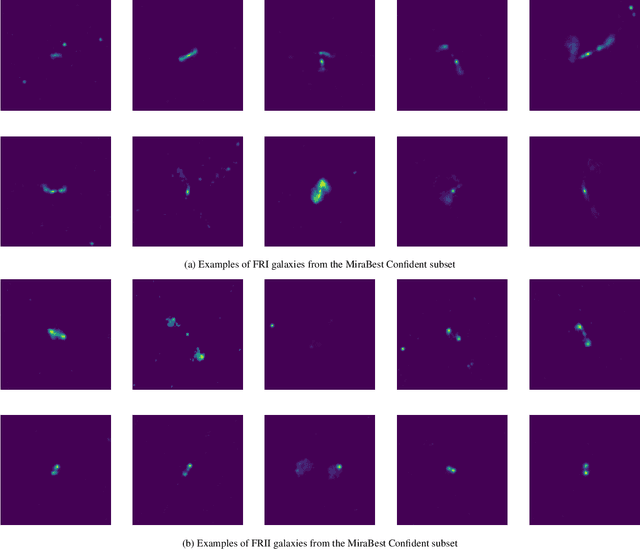
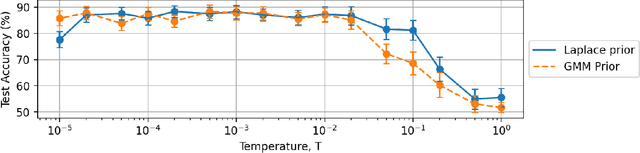
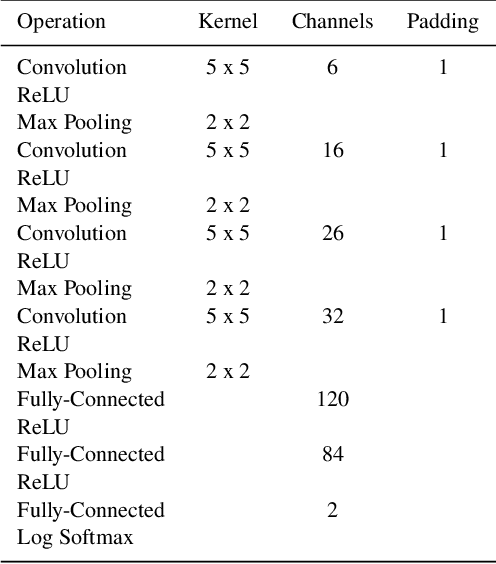
In this work we use variational inference to quantify the degree of uncertainty in deep learning model predictions of radio galaxy classification. We show that the level of model posterior variance for individual test samples is correlated with human uncertainty when labelling radio galaxies. We explore the model performance and uncertainty calibration for different weight priors and suggest that a sparse prior produces more well-calibrated uncertainty estimates. Using the posterior distributions for individual weights, we demonstrate that we can prune 30% of the fully-connected layer weights without significant loss of performance by removing the weights with the lowest signal-to-noise ratio. A larger degree of pruning can be achieved using a Fisher information based ranking, but both pruning methods affect the uncertainty calibration for Fanaroff-Riley type I and type II radio galaxies differently. Like other work in this field, we experience a cold posterior effect, whereby the posterior must be down-weighted to achieve good predictive performance. We examine whether adapting the cost function to accommodate model misspecification can compensate for this effect, but find that it does not make a significant difference. We also examine the effect of principled data augmentation and find that this improves upon the baseline but also does not compensate for the observed effect. We interpret this as the cold posterior effect being due to the overly effective curation of our training sample leading to likelihood misspecification, and raise this as a potential issue for Bayesian deep learning approaches to radio galaxy classification in future.
Reconstructing Training Data from Diverse ML Models by Ensemble Inversion
Nov 05, 2021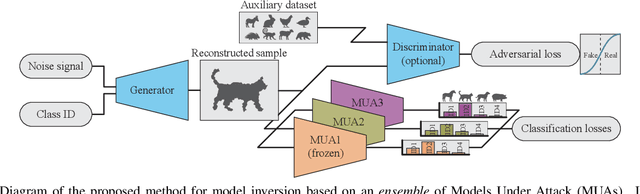
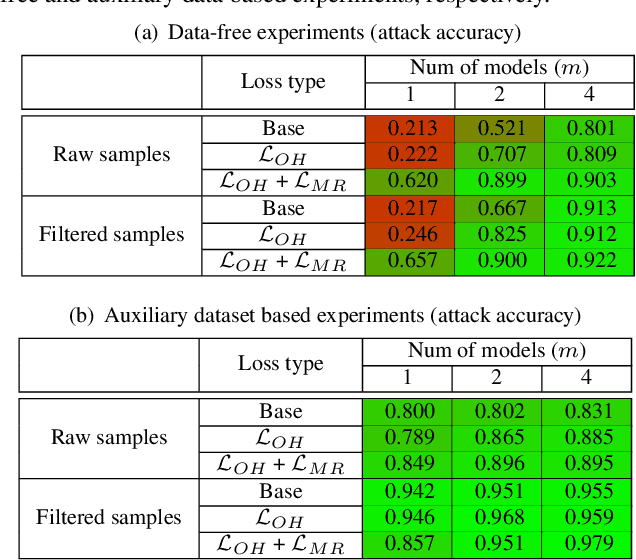
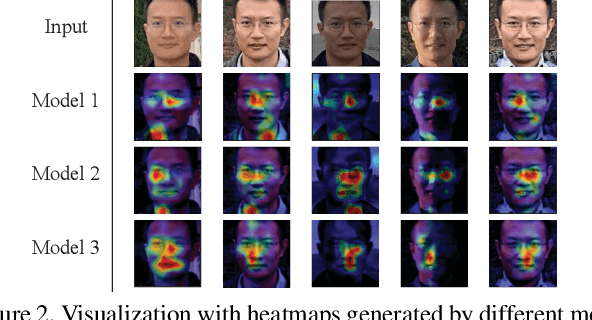
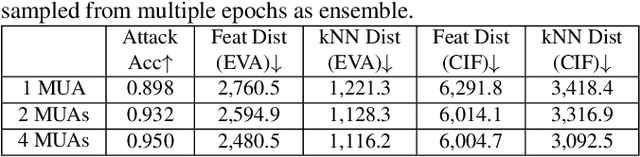
Model Inversion (MI), in which an adversary abuses access to a trained Machine Learning (ML) model attempting to infer sensitive information about its original training data, has attracted increasing research attention. During MI, the trained model under attack (MUA) is usually frozen and used to guide the training of a generator, such as a Generative Adversarial Network (GAN), to reconstruct the distribution of the original training data of that model. This might cause leakage of original training samples, and if successful, the privacy of dataset subjects will be at risk if the training data contains Personally Identifiable Information (PII). Therefore, an in-depth investigation of the potentials of MI techniques is crucial for the development of corresponding defense techniques. High-quality reconstruction of training data based on a single model is challenging. However, existing MI literature does not explore targeting multiple models jointly, which may provide additional information and diverse perspectives to the adversary. We propose the ensemble inversion technique that estimates the distribution of original training data by training a generator constrained by an ensemble (or set) of trained models with shared subjects or entities. This technique leads to noticeable improvements of the quality of the generated samples with distinguishable features of the dataset entities compared to MI of a single ML model. We achieve high quality results without any dataset and show how utilizing an auxiliary dataset that's similar to the presumed training data improves the results. The impact of model diversity in the ensemble is thoroughly investigated and additional constraints are utilized to encourage sharp predictions and high activations for the reconstructed samples, leading to more accurate reconstruction of training images.
EPNet++: Cascade Bi-directional Fusion for Multi-Modal 3D Object Detection
Jan 12, 2022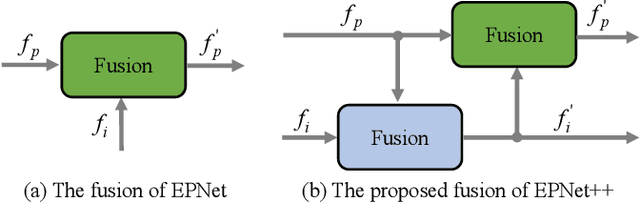
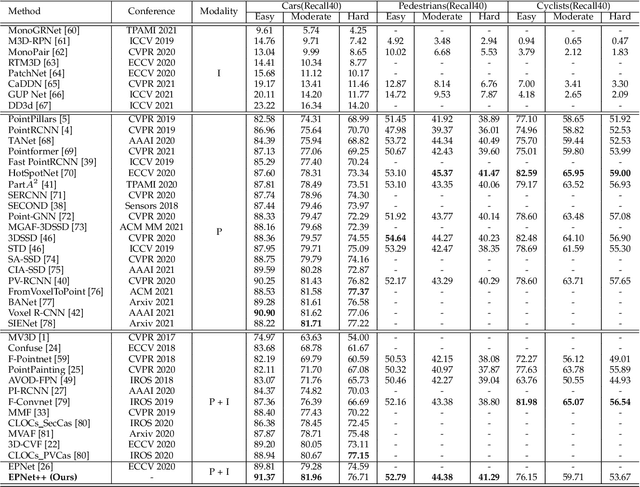
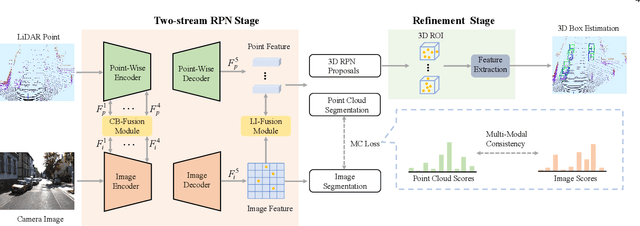
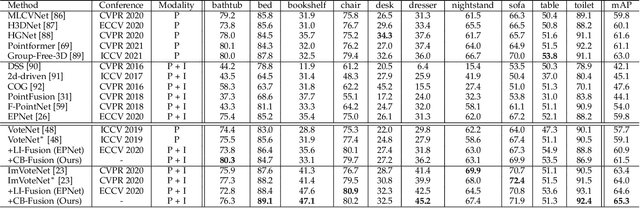
Recently, fusing the LiDAR point cloud and camera image to improve the performance and robustness of 3D object detection has received more and more attention, as these two modalities naturally possess strong complementarity. In this paper, we propose EPNet++ for multi-modal 3D object detection by introducing a novel Cascade Bi-directional Fusion~(CB-Fusion) module and a Multi-Modal Consistency~(MC) loss. More concretely, the proposed CB-Fusion module boosts the plentiful semantic information of point features with the image features in a cascade bi-directional interaction fusion manner, leading to more comprehensive and discriminative feature representations. The MC loss explicitly guarantees the consistency between predicted scores from two modalities to obtain more comprehensive and reliable confidence scores. The experiment results on the KITTI, JRDB and SUN-RGBD datasets demonstrate the superiority of EPNet++ over the state-of-the-art methods. Besides, we emphasize a critical but easily overlooked problem, which is to explore the performance and robustness of a 3D detector in a sparser scene. Extensive experiments present that EPNet++ outperforms the existing SOTA methods with remarkable margins in highly sparse point cloud cases, which might be an available direction to reduce the expensive cost of LiDAR sensors. Code will be released in the future.
Web Search via an Efficient and Effective Brain-Machine Interface
Oct 15, 2021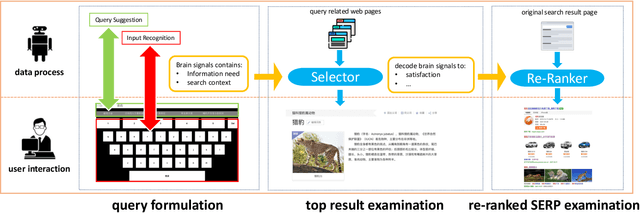


While search technologies have evolved to be robust and ubiquitous, the fundamental interaction paradigm has remained relatively stable for decades. With the maturity of the Brain-Machine Interface, we build an efficient and effective communication system between human beings and search engines based on electroencephalogram(EEG) signals, called Brain-Machine Search Interface(BMSI) system. The BMSI system provides functions including query reformulation and search result interaction. In our system, users can perform search tasks without having to use the mouse and keyboard. Therefore, it is useful for application scenarios in which hand-based interactions are infeasible, e.g, for users with severe neuromuscular disorders. Besides, based on brain signals decoding, our system can provide abundant and valuable user-side context information(e.g., real-time satisfaction feedback, extensive context information, and a clearer description of information needs) to the search engine, which is hard to capture in the previous paradigm. In our implementation, the system can decode user satisfaction from brain signals in real-time during the interaction process and re-rank the search results list based on user satisfaction feedback. The demo video is available at http://www.thuir.cn/group/YQLiu/datasets/BMSISystem.mp4.
Digital RIS (DRIS): The Future of Digital Beam Management in RIS-Assisted OWC Systems
Dec 18, 2021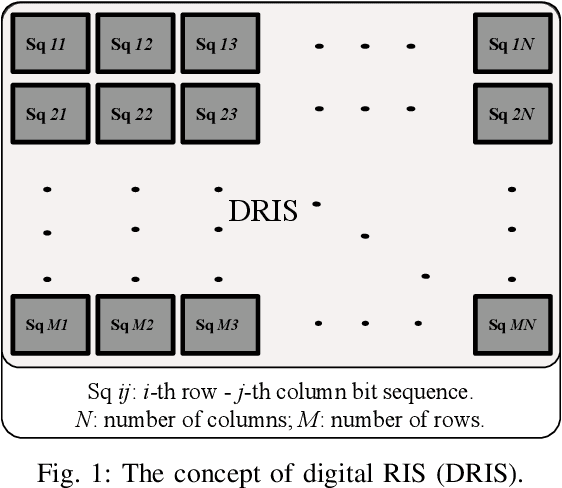
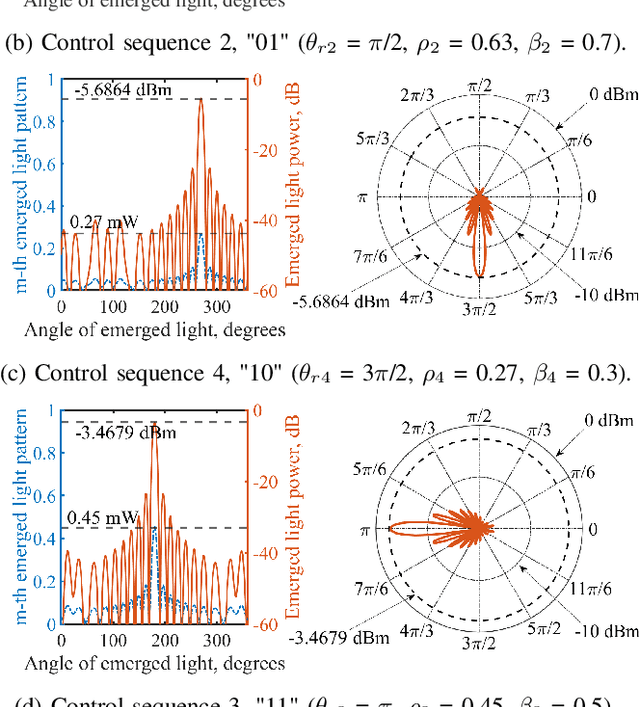
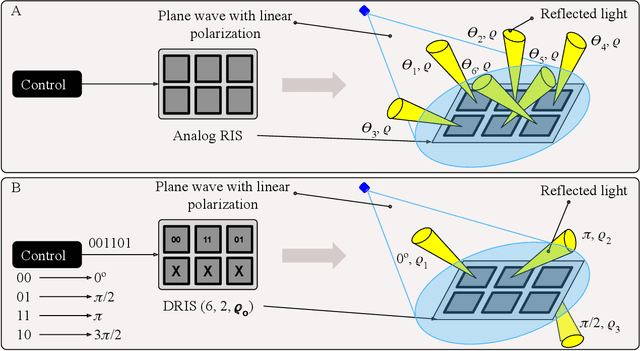
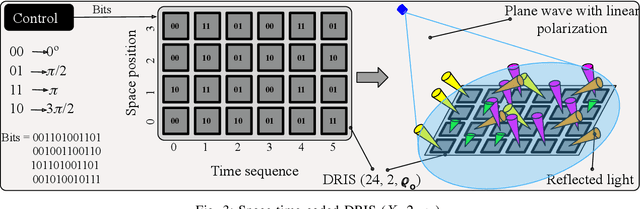
Reconfigurable intelligent surfaces (RIS) have been recently introduced to optical wireless communication (OWC) networks to resolve skip areas and improve the signal-to-noise ratio at the user's end. In OWC networks, RIS are based on mirrors or metasurfaces. Metasurfaces have evolved significantly over the last few years. As a result, coding, digital, programmable, and information metamaterials have been developed. The advantage of these materials is that they can enable digital signal processing (DSP) techniques. For the first time, this paper proposes the use of digital RIS (DRIS) in OWC systems. We discuss the concept of DRIS and the application of DSP methods to the physical material. In addition, we examine metamaterials for optical DRIS with liquid crystals serving as the front row material. Finally, we present a design example and discuss future research directions.
Neural Function Modules with Sparse Arguments: A Dynamic Approach to Integrating Information across Layers
Oct 15, 2020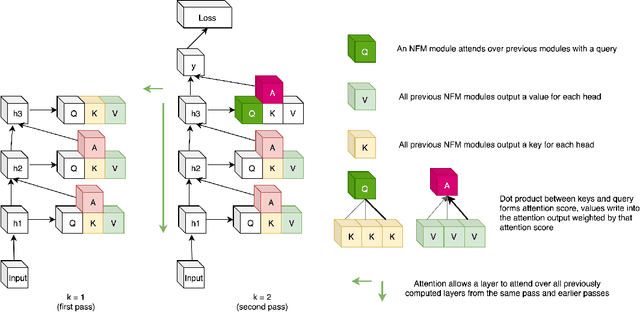

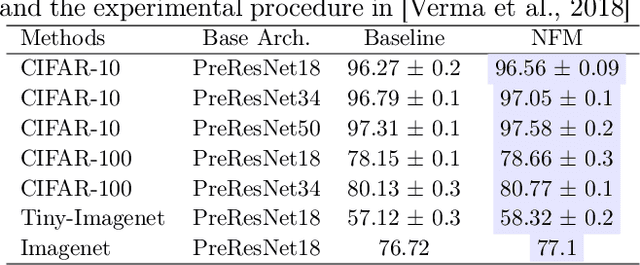
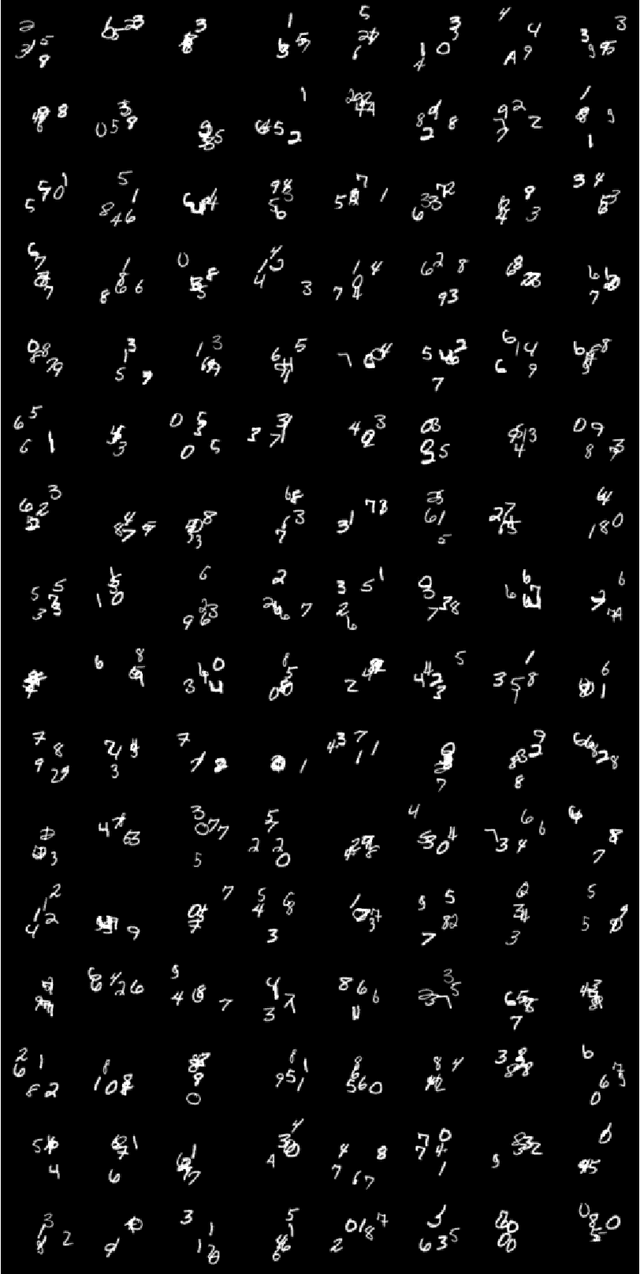
Feed-forward neural networks consist of a sequence of layers, in which each layer performs some processing on the information from the previous layer. A downside to this approach is that each layer (or module, as multiple modules can operate in parallel) is tasked with processing the entire hidden state, rather than a particular part of the state which is most relevant for that module. Methods which only operate on a small number of input variables are an essential part of most programming languages, and they allow for improved modularity and code re-usability. Our proposed method, Neural Function Modules (NFM), aims to introduce the same structural capability into deep learning. Most of the work in the context of feed-forward networks combining top-down and bottom-up feedback is limited to classification problems. The key contribution of our work is to combine attention, sparsity, top-down and bottom-up feedback, in a flexible algorithm which, as we show, improves the results in standard classification, out-of-domain generalization, generative modeling, and learning representations in the context of reinforcement learning.
Learning with latent group sparsity via heat flow dynamics on networks
Jan 20, 2022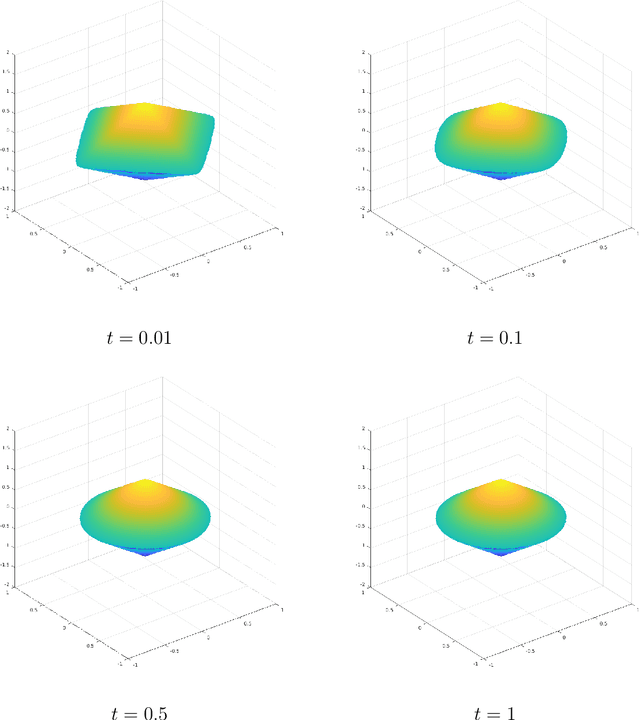
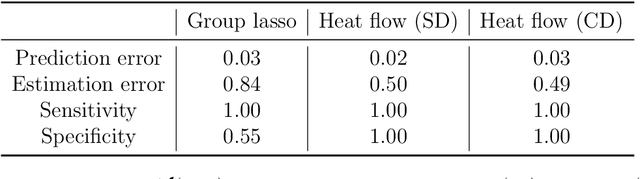
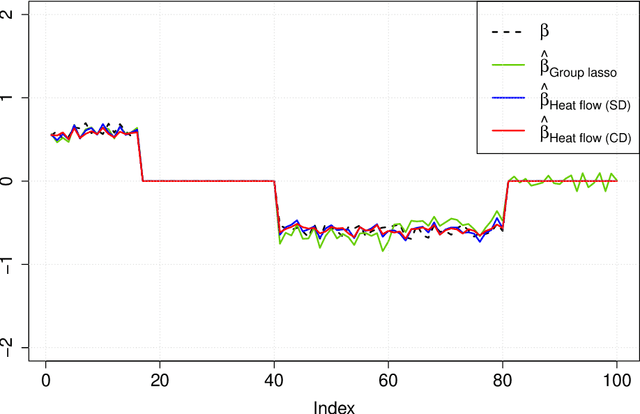
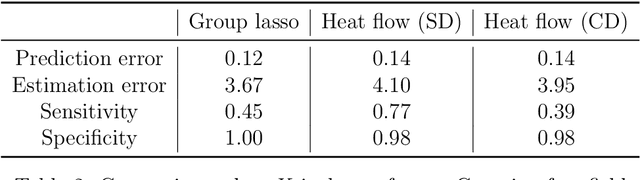
Group or cluster structure on explanatory variables in machine learning problems is a very general phenomenon, which has attracted broad interest from practitioners and theoreticians alike. In this work we contribute an approach to learning under such group structure, that does not require prior information on the group identities. Our paradigm is motivated by the Laplacian geometry of an underlying network with a related community structure, and proceeds by directly incorporating this into a penalty that is effectively computed via a heat flow-based local network dynamics. In fact, we demonstrate a procedure to construct such a network based on the available data. Notably, we dispense with computationally intensive pre-processing involving clustering of variables, spectral or otherwise. Our technique is underpinned by rigorous theorems that guarantee its effective performance and provide bounds on its sample complexity. In particular, in a wide range of settings, it provably suffices to run the heat flow dynamics for time that is only logarithmic in the problem dimensions. We explore in detail the interfaces of our approach with key statistical physics models in network science, such as the Gaussian Free Field and the Stochastic Block Model. We validate our approach by successful applications to real-world data from a wide array of application domains, including computer science, genetics, climatology and economics. Our work raises the possibility of applying similar diffusion-based techniques to classical learning tasks, exploiting the interplay between geometric, dynamical and stochastic structures underlying the data.
Block Modeling-Guided Graph Convolutional Neural Networks
Dec 28, 2021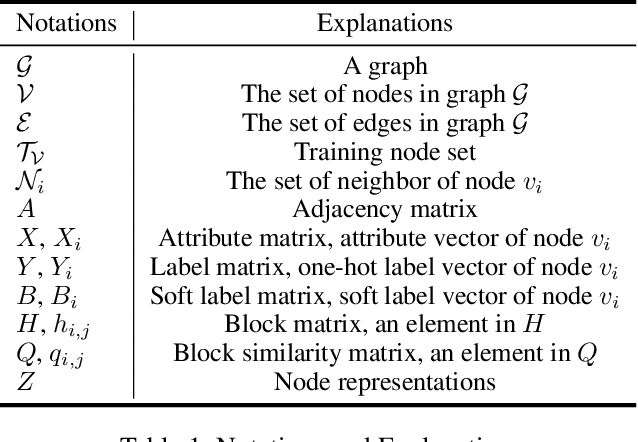
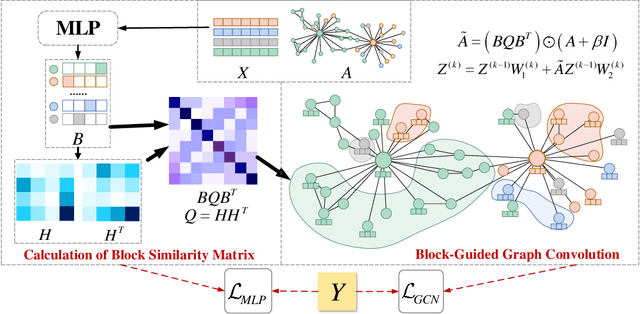
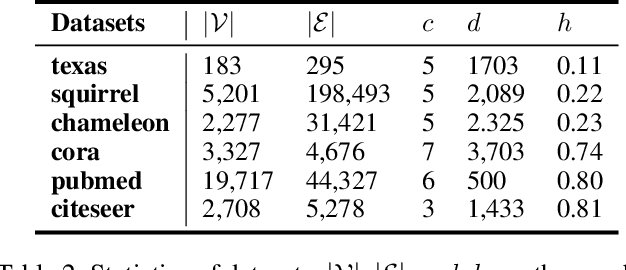
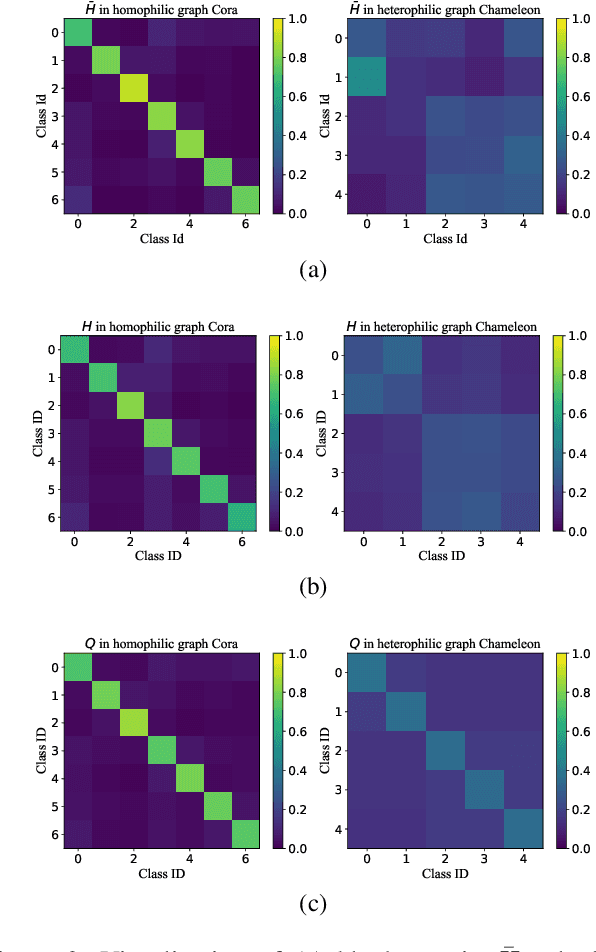
Graph Convolutional Network (GCN) has shown remarkable potential of exploring graph representation. However, the GCN aggregating mechanism fails to generalize to networks with heterophily where most nodes have neighbors from different classes, which commonly exists in real-world networks. In order to make the propagation and aggregation mechanism of GCN suitable for both homophily and heterophily (or even their mixture), we introduce block modeling into the framework of GCN so that it can realize "block-guided classified aggregation", and automatically learn the corresponding aggregation rules for neighbors of different classes. By incorporating block modeling into the aggregation process, GCN is able to aggregate information from homophilic and heterophilic neighbors discriminately according to their homophily degree. We compared our algorithm with state-of-art methods which deal with the heterophily problem. Empirical results demonstrate the superiority of our new approach over existing methods in heterophilic datasets while maintaining a competitive performance in homophilic datasets.
Doing More with Less: Overcoming Data Scarcity for POI Recommendation via Cross-Region Transfer
Jan 16, 2022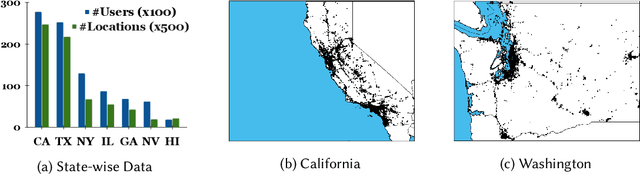
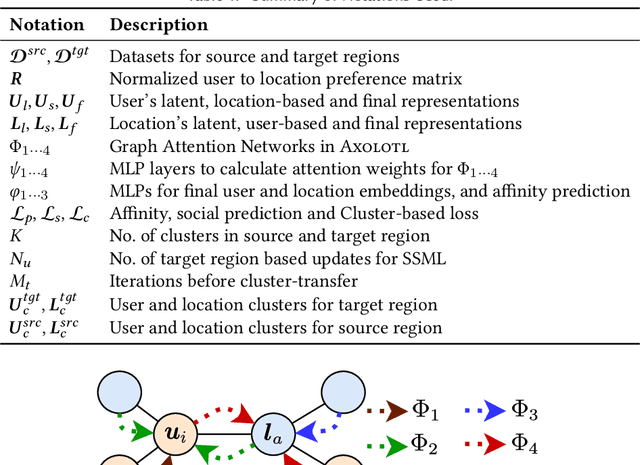
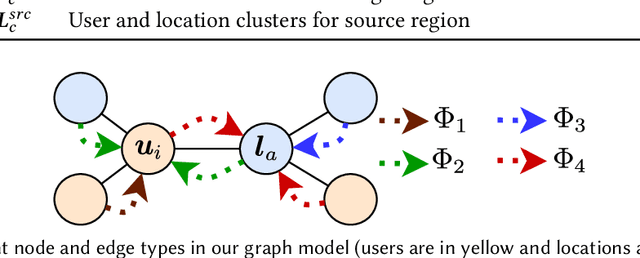

Variability in social app usage across regions results in a high skew of the quantity and the quality of check-in data collected, which in turn is a challenge for effective location recommender systems. In this paper, we present Axolotl (Automated cross Location-network Transfer Learning), a novel method aimed at transferring location preference models learned in a data-rich region to significantly boost the quality of recommendations in a data-scarce region. Axolotl predominantly deploys two channels for information transfer, (1) a meta-learning based procedure learned using location recommendation as well as social predictions, and (2) a lightweight unsupervised cluster-based transfer across users and locations with similar preferences. Both of these work together synergistically to achieve improved accuracy of recommendations in data-scarce regions without any prerequisite of overlapping users and with minimal fine-tuning. We build Axolotl on top of a twin graph-attention neural network model used for capturing the user- and location-conditioned influences in a user-mobility graph for each region. We conduct extensive experiments on 12 user mobility datasets across the U.S., Japan, and Germany, using 3 as source regions and 9 of them (that have much sparsely recorded mobility data) as target regions. Empirically, we show that Axolotl achieves up to 18% better recommendation performance than the existing state-of-the-art methods across all metrics.
Temporal Shuffling for Defending Deep Action Recognition Models against Adversarial Attacks
Dec 15, 2021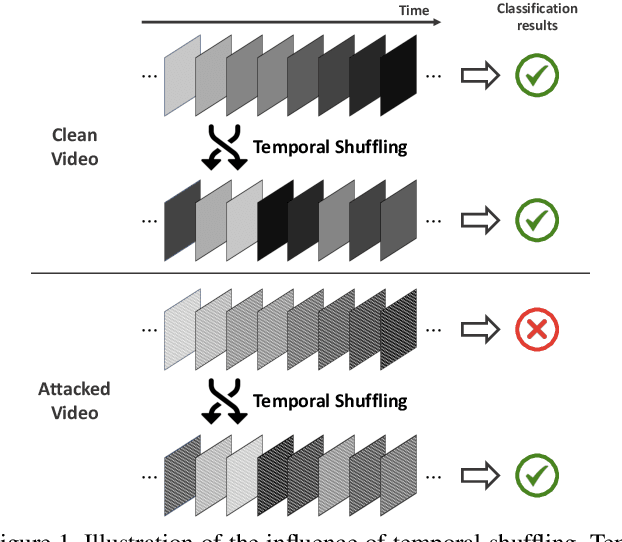
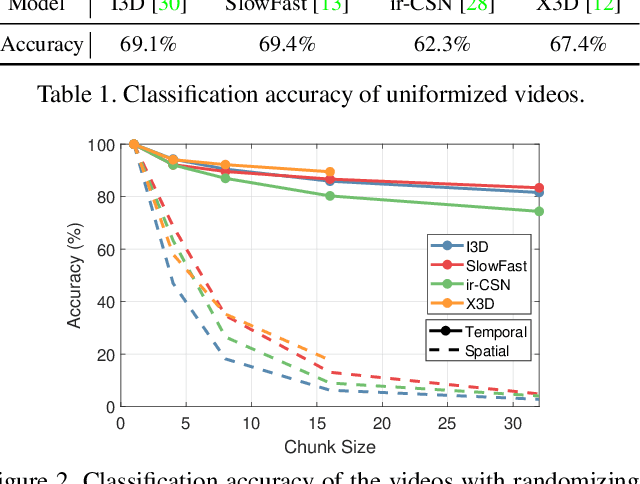
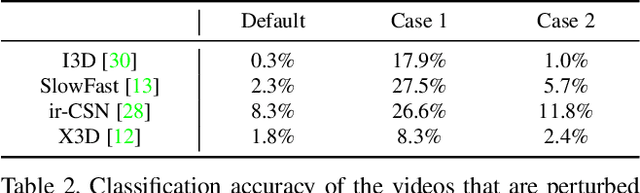
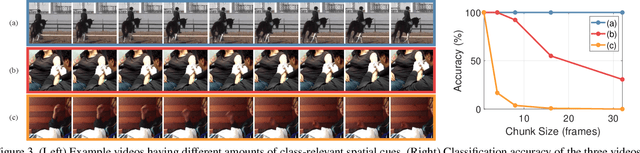
Recently, video-based action recognition methods using convolutional neural networks (CNNs) achieve remarkable recognition performance. However, there is still lack of understanding about the generalization mechanism of action recognition models. In this paper, we suggest that action recognition models rely on the motion information less than expected, and thus they are robust to randomization of frame orders. Based on this observation, we develop a novel defense method using temporal shuffling of input videos against adversarial attacks for action recognition models. Another observation enabling our defense method is that adversarial perturbations on videos are sensitive to temporal destruction. To the best of our knowledge, this is the first attempt to design a defense method specific to video-based action recognition models.