 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Spatial active noise control based on individual kernel interpolation of primary and secondary sound fields
Feb 10, 2022
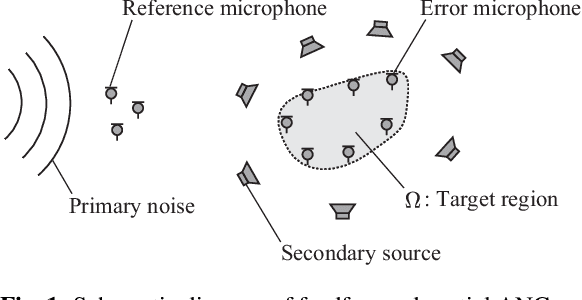
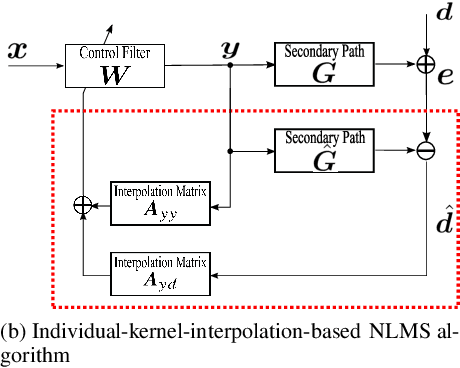
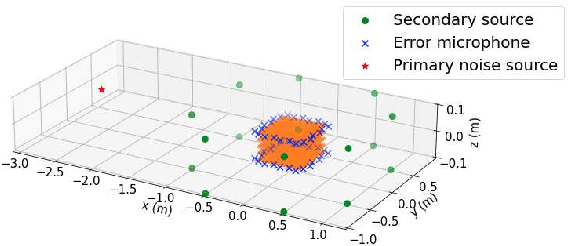
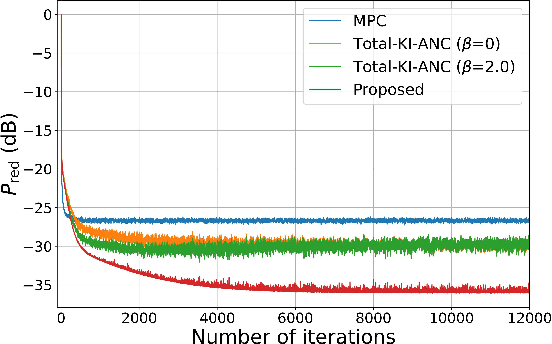
A spatial active noise control (ANC) method based on the individual kernel interpolation of primary and secondary sound fields is proposed. Spatial ANC is aimed at cancelling unwanted primary noise within a continuous region by using multiple secondary sources and microphones. A method based on the kernel interpolation of a sound field makes it possible to attenuate noise over the target region with flexible array geometry. Furthermore, by using the kernel function with directional weighting, prior information on primary noise source directions can be taken into consideration. However, whereas the sound field to be interpolated is a superposition of primary and secondary sound fields, the directional weight for the primary noise source was applied to the total sound field in previous work; therefore, the performance improvement was limited. We propose a method of individually interpolating the primary and secondary sound fields and formulate a normalized least-mean-square algorithm based on this interpolation method. Experimental results indicate that the proposed method outperforms the method based on total kernel interpolation.
Non-Gaussian Component Analysis via Lattice Basis Reduction
Dec 16, 2021Non-Gaussian Component Analysis (NGCA) is the following distribution learning problem: Given i.i.d. samples from a distribution on $\mathbb{R}^d$ that is non-gaussian in a hidden direction $v$ and an independent standard Gaussian in the orthogonal directions, the goal is to approximate the hidden direction $v$. Prior work \cite{DKS17-sq} provided formal evidence for the existence of an information-computation tradeoff for NGCA under appropriate moment-matching conditions on the univariate non-gaussian distribution $A$. The latter result does not apply when the distribution $A$ is discrete. A natural question is whether information-computation tradeoffs persist in this setting. In this paper, we answer this question in the negative by obtaining a sample and computationally efficient algorithm for NGCA in the regime that $A$ is discrete or nearly discrete, in a well-defined technical sense. The key tool leveraged in our algorithm is the LLL method \cite{LLL82} for lattice basis reduction.
Hiding Information in Big Data based on Deep Learning
Dec 31, 2019
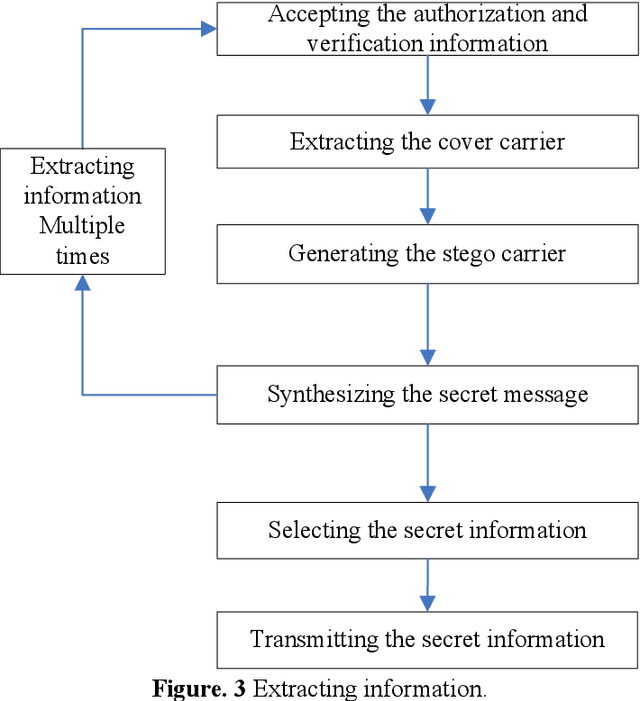
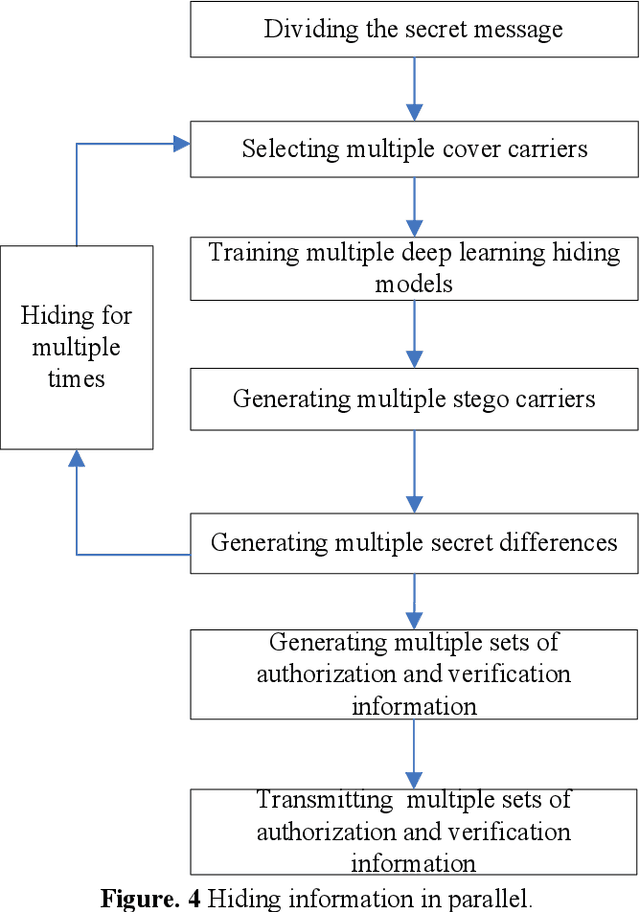
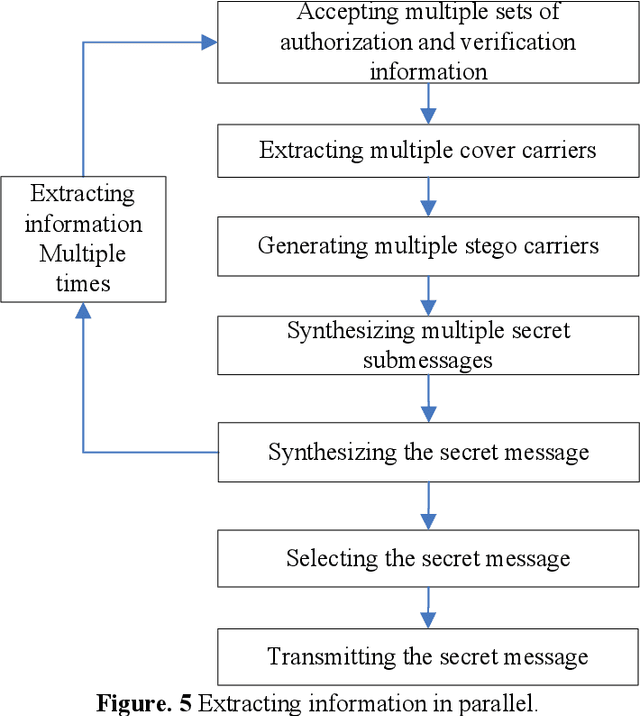
The current approach of information hiding based on deep learning model can not directly use the original data as carriers, which means the approach can not make use of the existing data in big data to hiding information. We proposed a novel method of information hiding in big data based on deep learning. Our method uses the existing data in big data as carriers and uses deep learning models to hide and extract secret messages in big data. The data amount of big data is unlimited and thus the data amount of secret messages hided in big data can also be unlimited. Before opponents want to extract secret messages from carriers, they need to find the carriers, however finding out the carriers from big data is just like finding out a box from the sea. Deep learning models are well known as deep black boxes in which the process from the input to the output is very complex, and thus the deep learning model for information hiding is almost impossible for opponents to reconstruct. The results also show that our method can hide secret messages safely, conveniently, quickly and with no limitation on the data amount.
DeCorus: Hierarchical Multivariate Anomaly Detection at Cloud-Scale
Feb 14, 2022
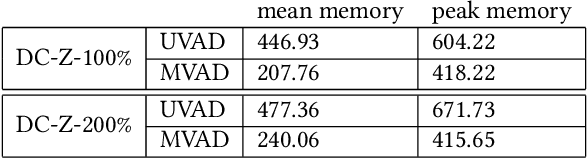
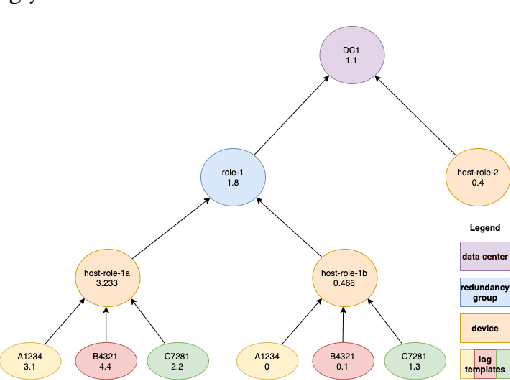
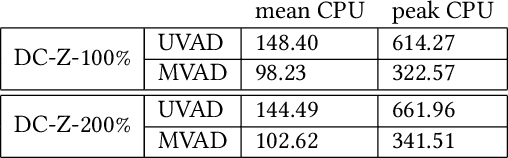
Multivariate anomaly detection can be used to identify outages within large volumes of telemetry data for computing systems. However, developing an efficient anomaly detector that can provide users with relevant information is a challenging problem. We introduce our approach to hierarchical multivariate anomaly detection called DeCorus, a statistical multivariate anomaly detector which achieves linear complexity. It extends standard statistical techniques to improve their ability to find relevant anomalies within noisy signals and makes use of types of domain knowledge that system operators commonly possess to compute system-level anomaly scores. We describe the implementation of DeCorus an online log anomaly detection tool for network device syslog messages deployed at a cloud service provider. We use real-world data sets that consist of $1.5$ billion network device syslog messages and hundreds of incident tickets to characterize the performance of DeCorus and compare its ability to detect incidents with five alternative anomaly detectors. While DeCorus outperforms the other anomaly detectors, all of them are challenged by our data set. We share how DeCorus provides value in the field and how we plan to improve its incident detection accuracy.
Stage-Aware Feature Alignment Network for Real-Time Semantic Segmentation of Street Scenes
Mar 08, 2022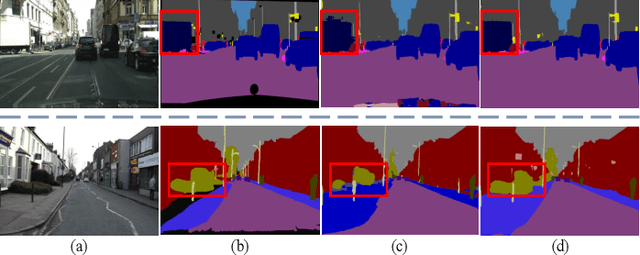
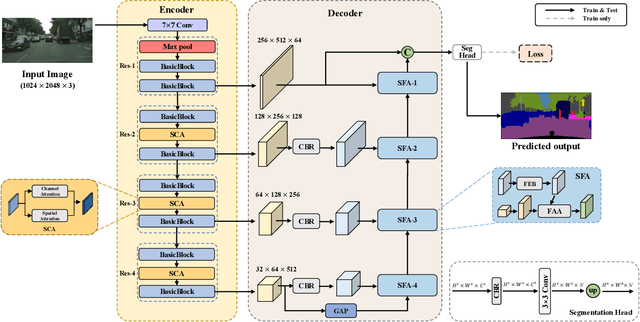
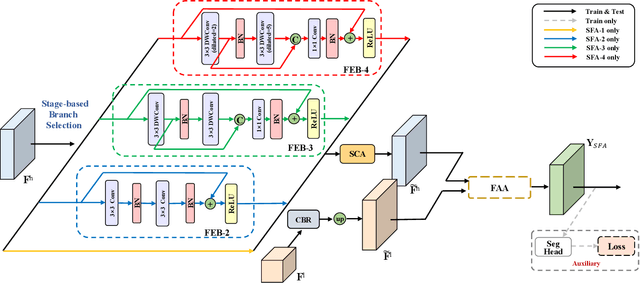
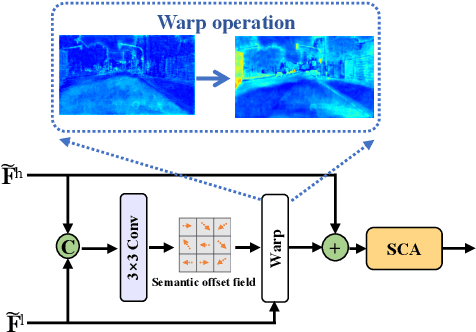
Over the past few years, deep convolutional neural network-based methods have made great progress in semantic segmentation of street scenes. Some recent methods align feature maps to alleviate the semantic gap between them and achieve high segmentation accuracy. However, they usually adopt the feature alignment modules with the same network configuration in the decoder and thus ignore the different roles of stages of the decoder during feature aggregation, leading to a complex decoder structure. Such a manner greatly affects the inference speed. In this paper, we present a novel Stage-aware Feature Alignment Network (SFANet) based on the encoder-decoder structure for real-time semantic segmentation of street scenes. Specifically, a Stage-aware Feature Alignment module (SFA) is proposed to align and aggregate two adjacent levels of feature maps effectively. In the SFA, by taking into account the unique role of each stage in the decoder, a novel stage-aware Feature Enhancement Block (FEB) is designed to enhance spatial details and contextual information of feature maps from the encoder. In this way, we are able to address the misalignment problem with a very simple and efficient multi-branch decoder structure. Moreover, an auxiliary training strategy is developed to explicitly alleviate the multi-scale object problem without bringing additional computational costs during the inference phase. Experimental results show that the proposed SFANet exhibits a good balance between accuracy and speed for real-time semantic segmentation of street scenes. In particular, based on ResNet-18, SFANet respectively obtains 78.1% and 74.7% mean of class-wise Intersection-over-Union (mIoU) at inference speeds of 37 FPS and 96 FPS on the challenging Cityscapes and CamVid test datasets by using only a single GTX 1080Ti GPU.
Sampling Random Group Fair Rankings
Mar 02, 2022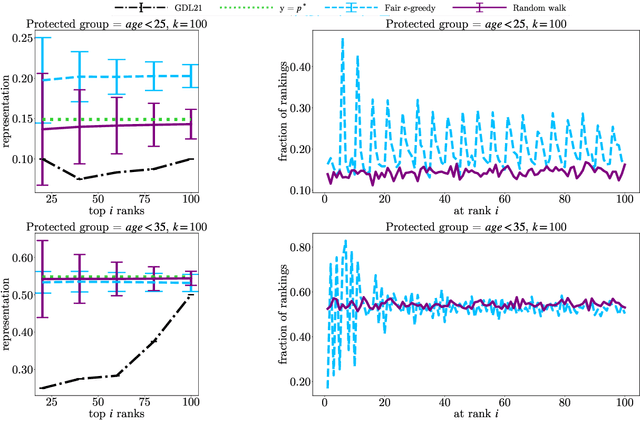
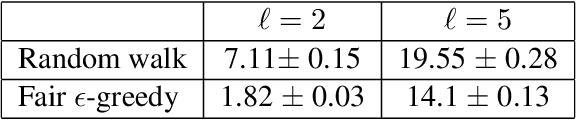
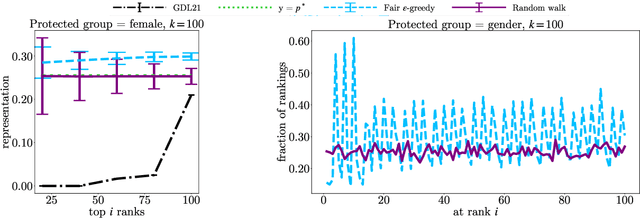
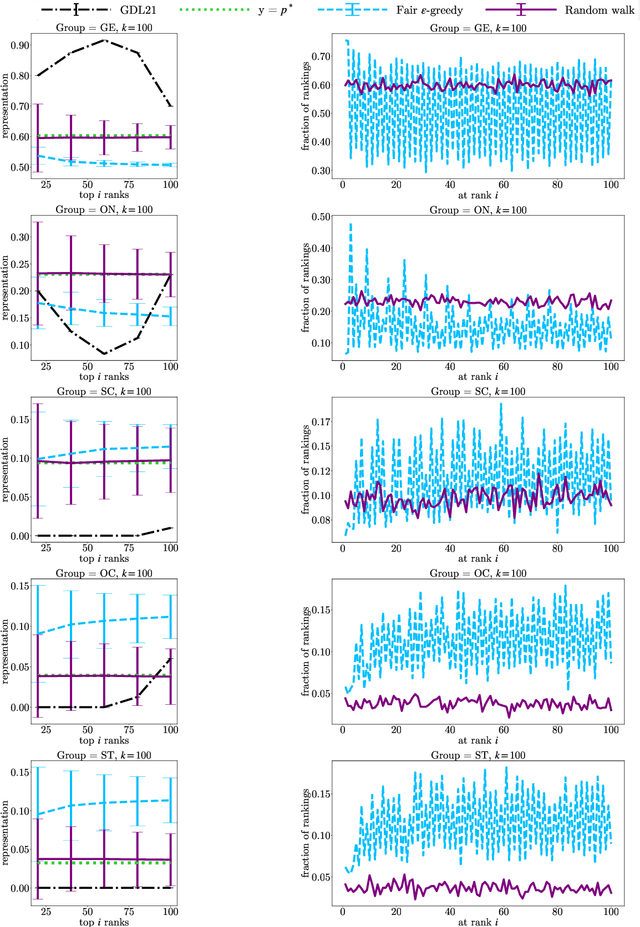
In this paper, we consider the problem of randomized group fair ranking that merges given ranked list of items from different sensitive demographic groups while satisfying given lower and upper bounds on the representation of each group in the top ranks. Our randomized group fair ranking formulation works even when there is implicit bias, incomplete relevance information, or when only ordinal ranking is available instead of relevance scores or utility values. We take an axiomatic approach and show that there is a unique distribution $\mathcal{D}$ to sample a random group fair ranking that satisfies a natural set of consistency and fairness axioms. Moreover, $\mathcal{D}$ satisfies representation constraints for every group at every rank, a characteristic that cannot be satisfied by any deterministic ranking. We propose three algorithms to sample a random group fair ranking from $\mathcal{D}$. Our first algorithm samples rankings from $\mathcal{D}$ exactly, in time exponential in the number of groups. Our second algorithm samples random group fair rankings from $\mathcal{D}$ exactly and is faster than the first algorithm when the gap between upper and lower bounds on the representation for each group is small. Our third algorithm samples rankings from a distribution $\epsilon$-close to $\mathcal{D}$ in total variation distance, and has expected running time polynomial in all input parameters and $1/\epsilon$ when there is a large gap between upper and lower bound representation constraints for all the groups. We experimentally validate the above guarantees of our algorithms for group fairness in top ranks and representation in every rank on real-world data sets.
An experimental study of the vision-bottleneck in VQA
Feb 14, 2022As in many tasks combining vision and language, both modalities play a crucial role in Visual Question Answering (VQA). To properly solve the task, a given model should both understand the content of the proposed image and the nature of the question. While the fusion between modalities, which is another obviously important part of the problem, has been highly studied, the vision part has received less attention in recent work. Current state-of-the-art methods for VQA mainly rely on off-the-shelf object detectors delivering a set of object bounding boxes and embeddings, which are then combined with question word embeddings through a reasoning module. In this paper, we propose an in-depth study of the vision-bottleneck in VQA, experimenting with both the quantity and quality of visual objects extracted from images. We also study the impact of two methods to incorporate the information about objects necessary for answering a question, in the reasoning module directly, and earlier in the object selection stage. This work highlights the importance of vision in the context of VQA, and the interest of tailoring vision methods used in VQA to the task at hand.
Semi-Random Sparse Recovery in Nearly-Linear Time
Mar 08, 2022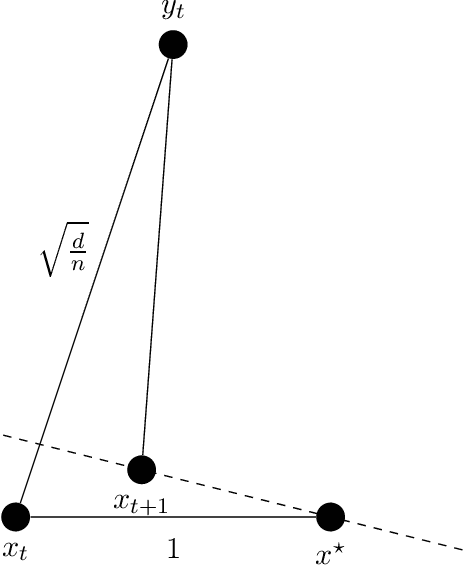
Sparse recovery is one of the most fundamental and well-studied inverse problems. Standard statistical formulations of the problem are provably solved by general convex programming techniques and more practical, fast (nearly-linear time) iterative methods. However, these latter "fast algorithms" have previously been observed to be brittle in various real-world settings. We investigate the brittleness of fast sparse recovery algorithms to generative model changes through the lens of studying their robustness to a "helpful" semi-random adversary, a framework which tests whether an algorithm overfits to input assumptions. We consider the following basic model: let $\mathbf{A} \in \mathbb{R}^{n \times d}$ be a measurement matrix which contains an unknown subset of rows $\mathbf{G} \in \mathbb{R}^{m \times d}$ which are bounded and satisfy the restricted isometry property (RIP), but is otherwise arbitrary. Letting $x^\star \in \mathbb{R}^d$ be $s$-sparse, and given either exact measurements $b = \mathbf{A} x^\star$ or noisy measurements $b = \mathbf{A} x^\star + \xi$, we design algorithms recovering $x^\star$ information-theoretically optimally in nearly-linear time. We extend our algorithm to hold for weaker generative models relaxing our planted RIP assumption to a natural weighted variant, and show that our method's guarantees naturally interpolate the quality of the measurement matrix to, in some parameter regimes, run in sublinear time. Our approach differs from prior fast iterative methods with provable guarantees under semi-random generative models: natural conditions on a submatrix which make sparse recovery tractable are NP-hard to verify. We design a new iterative method tailored to the geometry of sparse recovery which is provably robust to our semi-random model. We hope our approach opens the door to new robust, efficient algorithms for natural statistical inverse problems.
Multi-task head pose estimation in-the-wild
Feb 04, 2022
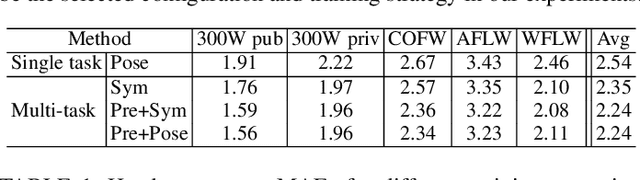

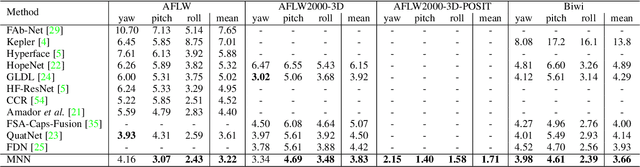
We present a deep learning-based multi-task approach for head pose estimation in images. We contribute with a network architecture and training strategy that harness the strong dependencies among face pose, alignment and visibility, to produce a top performing model for all three tasks. Our architecture is an encoder-decoder CNN with residual blocks and lateral skip connections. We show that the combination of head pose estimation and landmark-based face alignment significantly improve the performance of the former task. Further, the location of the pose task at the bottleneck layer, at the end of the encoder, and that of tasks depending on spatial information, such as visibility and alignment, in the final decoder layer, also contribute to increase the final performance. In the experiments conducted the proposed model outperforms the state-of-the-art in the face pose and visibility tasks. By including a final landmark regression step it also produces face alignment results on par with the state-of-the-art.
Predictive Coding: Towards a Future of Deep Learning beyond Backpropagation?
Feb 18, 2022
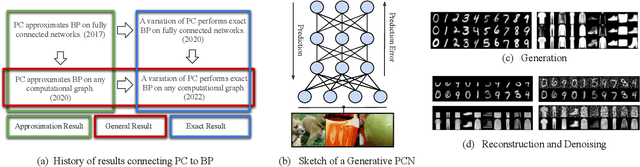
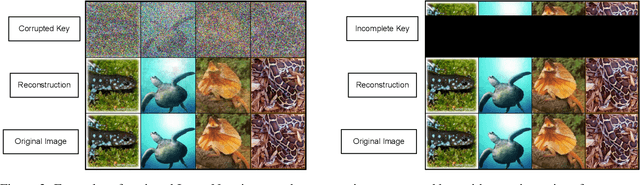
The backpropagation of error algorithm used to train deep neural networks has been fundamental to the successes of deep learning. However, it requires sequential backward updates and non-local computations, which make it challenging to parallelize at scale and is unlike how learning works in the brain. Neuroscience-inspired learning algorithms, however, such as \emph{predictive coding}, which utilize local learning, have the potential to overcome these limitations and advance beyond current deep learning technologies. While predictive coding originated in theoretical neuroscience as a model of information processing in the cortex, recent work has developed the idea into a general-purpose algorithm able to train neural networks using only local computations. In this survey, we review works that have contributed to this perspective and demonstrate the close theoretical connections between predictive coding and backpropagation, as well as works that highlight the multiple advantages of using predictive coding models over backpropagation-trained neural networks. Specifically, we show the substantially greater flexibility of predictive coding networks against equivalent deep neural networks, which can function as classifiers, generators, and associative memories simultaneously, and can be defined on arbitrary graph topologies. Finally, we review direct benchmarks of predictive coding networks on machine learning classification tasks, as well as its close connections to control theory and applications in robotics.