 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Direct evaluation of progression or regression of disease burden in brain metastatic disease with Deep Neuroevolution
Mar 24, 2022
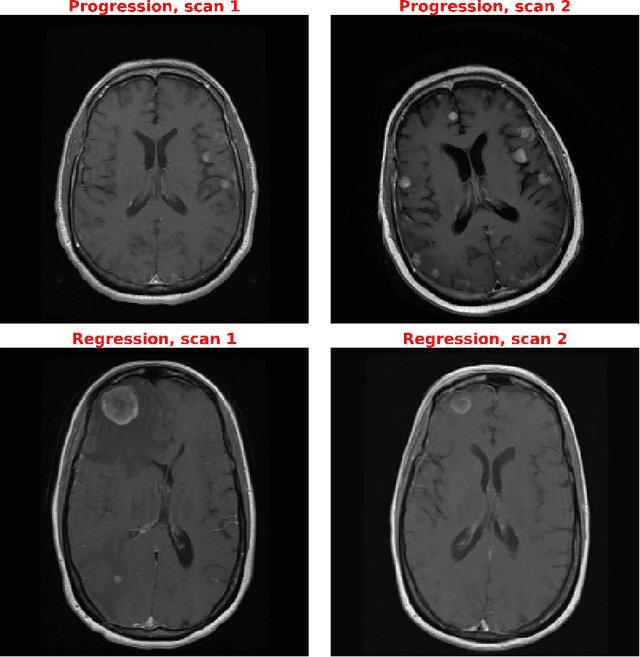
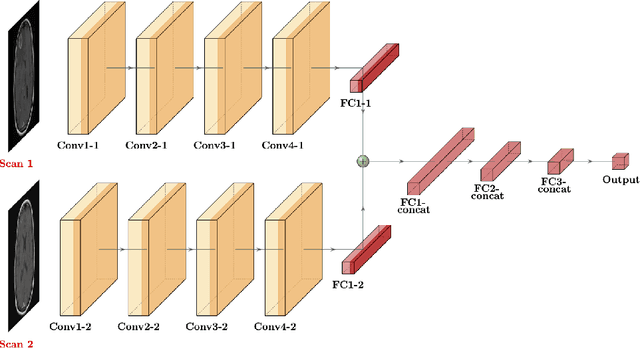
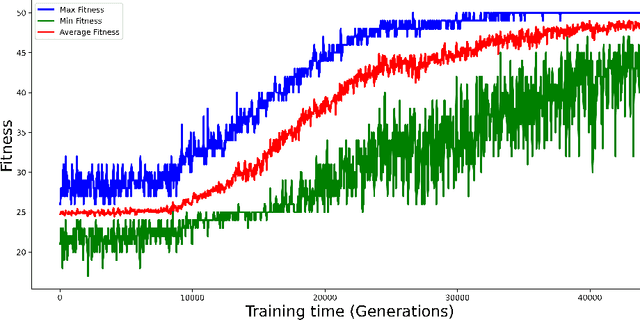
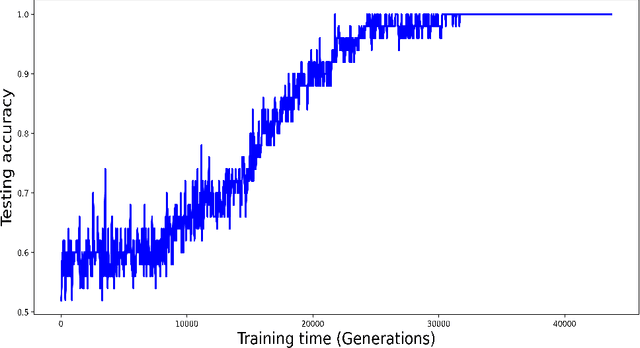
Purpose: A core component of advancing cancer treatment research is assessing response to therapy. Doing so by hand, for example as per RECIST or RANO criteria, is tedious, time-consuming, and can miss important tumor response information; most notably, they exclude non-target lesions. We wish to assess change in a holistic fashion that includes all lesions, obtaining simple, informative, and automated assessments of tumor progression or regression. Due to often low patient enrolments in clinical trials, we wish to make response assessments with small training sets. Deep neuroevolution (DNE) can produce radiology artificial intelligence (AI) that performs well on small training sets. Here we use DNE for function approximation that predicts progression versus regression of metastatic brain disease. Methods: We analyzed 50 pairs of MRI contrast-enhanced images as our training set. Half of these pairs, separated in time, qualified as disease progression, while the other 25 images constituted regression. We trained the parameters of a relatively small CNN via mutations that consisted of random CNN weight adjustments and mutation fitness. We then incorporated the best mutations into the next generations CNN, repeating this process for approximately 50,000 generations. We applied the CNNs to our training set, as well as a separate testing set with the same class balance of 25 progression and 25 regression images. Results: DNE achieved monotonic convergence to 100% training set accuracy. DNE also converged monotonically to 100% testing set accuracy. Conclusion: DNE can accurately classify brain-metastatic disease progression versus regression. Future work will extend the input from 2D image slices to full 3D volumes, and include the category of no change. We believe that an approach such as our could ultimately provide a useful adjunct to RANO/RECIST assessment.
Competing in a Complex Hidden Role Game with Information Set Monte Carlo Tree Search
May 14, 2020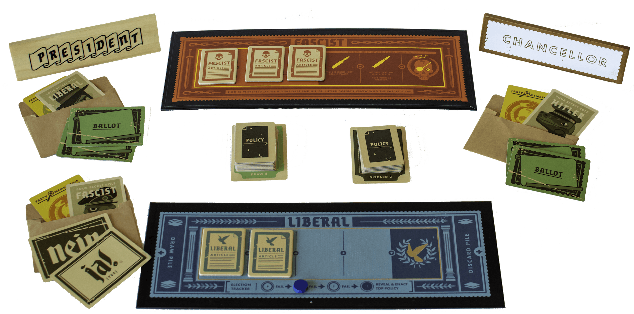
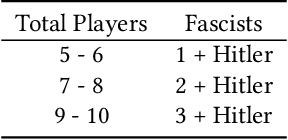
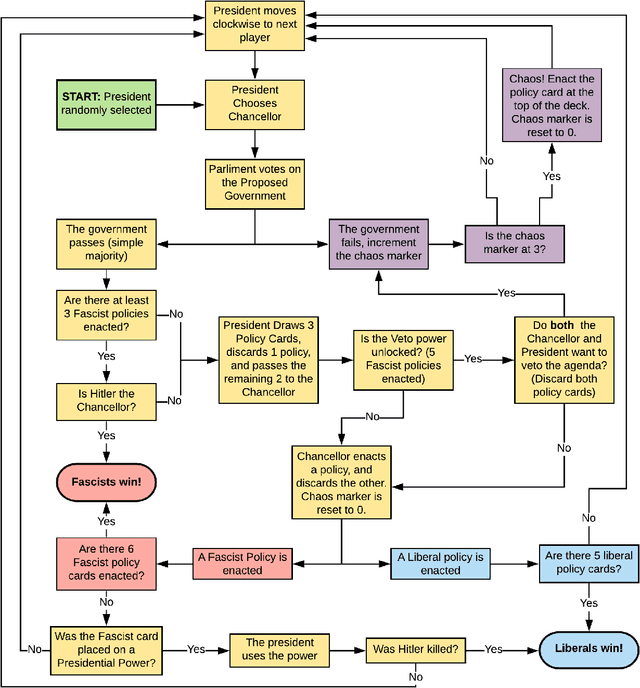
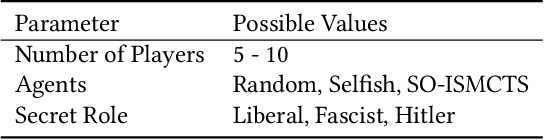
Advances in intelligent game playing agents have led to successes in perfect information games like Go and imperfect information games like Poker. The Information Set Monte Carlo Tree Search (ISMCTS) family of algorithms outperforms previous algorithms using Monte Carlo methods in imperfect information games. In this paper, Single Observer Information Set Monte Carlo Tree Search (SO-ISMCTS) is applied to Secret Hitler, a popular social deduction board game that combines traditional hidden role mechanics with the randomness of a card deck. This combination leads to a more complex information model than the hidden role and card deck mechanics alone. It is shown in 10108 simulated games that SO-ISMCTS plays as well as simpler rule based agents, and demonstrates the potential of ISMCTS algorithms in complicated information set domains.
Sectioning of Biomedical Abstracts: A Sequence of Sequence Classification Task
Jan 18, 2022Rapid growth of the biomedical literature has led to many advances in the biomedical text mining field. Among the vast amount of information, biomedical article abstracts are the easily accessible sources. However, the number of the structured abstracts, describing the rhetorical sections with one of Background, Objective, Method, Result and Conclusion categories is still not considerable. Exploration of valuable information in the biomedical abstracts can be expedited with the improvements in the sequential sentence classification task. Deep learning based models has great performance/potential in achieving significant results in this task. However, they can often be overly complex and overfit to specific data. In this project, we study a state-of-the-art deep learning model, which we called SSN-4 model here. We investigate different components of the SSN-4 model to study the trade-off between the performance and complexity. We explore how well this model generalizes to a new data set beyond Randomized Controlled Trials (RCT) dataset. We address the question that whether word embeddings can be adjusted to the task to improve the performance. Furthermore, we develop a second model that addresses the confusion pairs in the first model. Results show that SSN-4 model does not appear to generalize well beyond RCT dataset.
Maximizing Conditional Independence for Unsupervised Domain Adaptation
Mar 07, 2022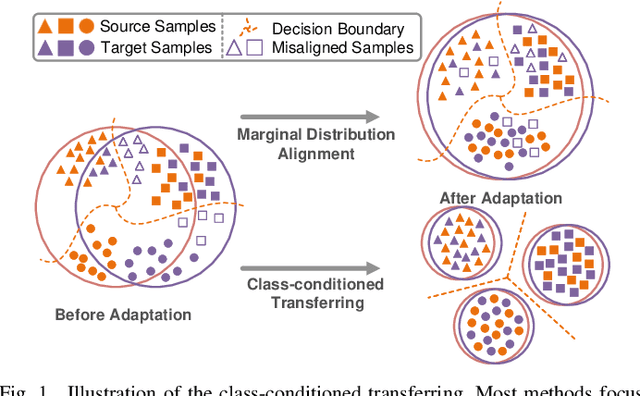
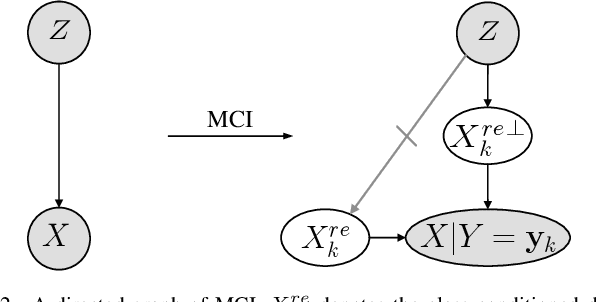
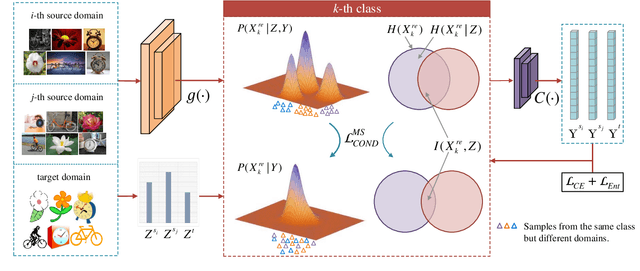
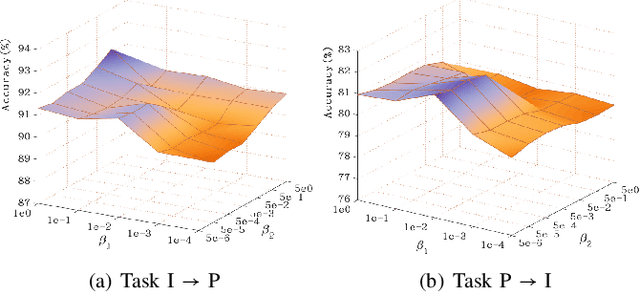
Unsupervised domain adaptation studies how to transfer a learner from a labeled source domain to an unlabeled target domain with different distributions. Existing methods mainly focus on matching the marginal distributions of the source and target domains, which probably lead a misalignment of samples from the same class but different domains. In this paper, we deal with this misalignment by achieving the class-conditioned transferring from a new perspective. We aim to maximize the conditional independence of feature and domain given class in the reproducing kernel Hilbert space. The optimization of the conditional independence measure can be viewed as minimizing a surrogate of a certain mutual information between feature and domain. An interpretable empirical estimation of the conditional dependence is deduced and connected with the unconditional case. Besides, we provide an upper bound on the target error by taking the class-conditional distribution into account, which provides a new theoretical insight for most class-conditioned transferring methods. In addition to unsupervised domain adaptation, we extend our method to the multi-source scenario in a natural and elegant way. Extensive experiments on four benchmarks validate the effectiveness of the proposed models in both unsupervised domain adaptation and multiple source domain adaptation.
Federated Remote Physiological Measurement with Imperfect Data
Mar 11, 2022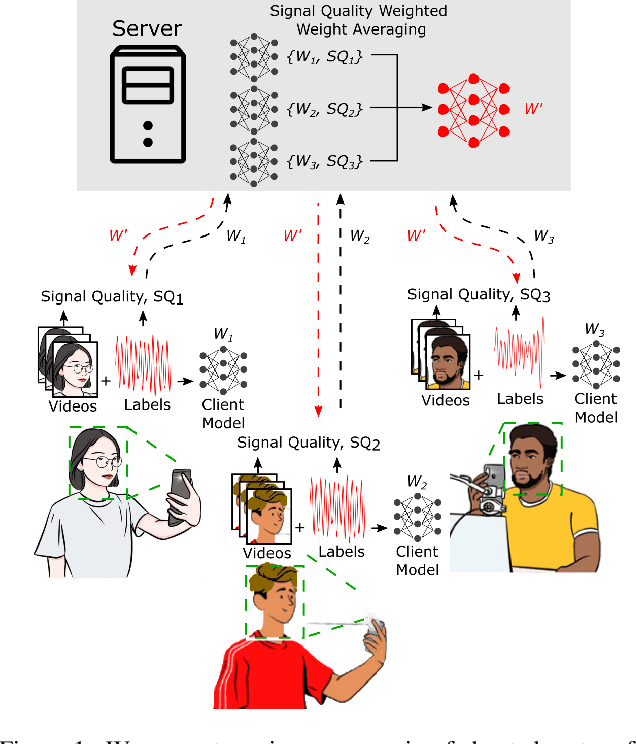
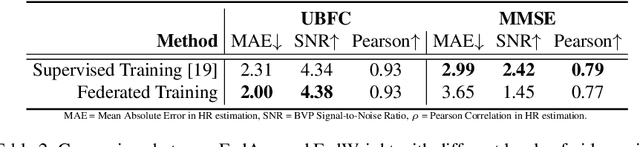
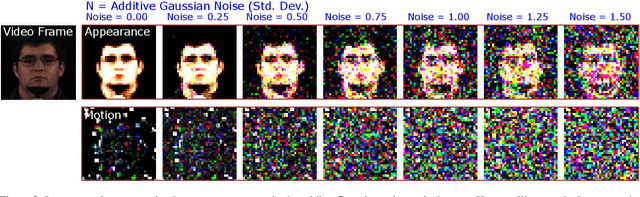
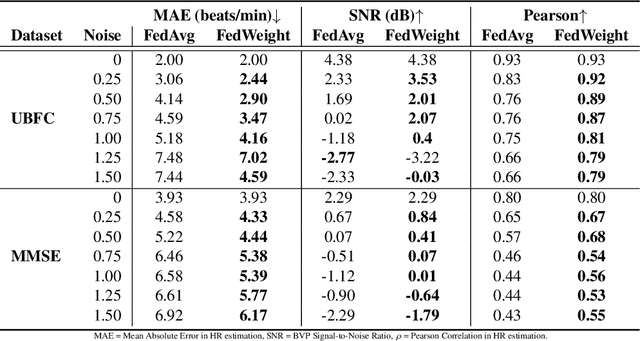
The growing need for technology that supports remote healthcare is being acutely highlighted by an aging population and the COVID-19 pandemic. In health-related machine learning applications the ability to learn predictive models without data leaving a private device is attractive, especially when these data might contain features (e.g., photographs or videos of the body) that make identifying a subject trivial and/or the training data volume is large (e.g., uncompressed video). Camera-based remote physiological sensing facilitates scalable and low-cost measurement, but is a prime example of a task that involves analysing high bit-rate videos containing identifiable images and sensitive health information. Federated learning enables privacy-preserving decentralized training which has several properties beneficial for camera-based sensing. We develop the first mobile federated learning camera-based sensing system and show that it can perform competitively with traditional state-of-the-art supervised approaches. However, in the presence of corrupted data (e.g., video or label noise) from a few devices the performance of weight averaging quickly degrades. To address this, we leverage knowledge about the expected noise profile within the video to intelligently adjust how the model weights are averaged on the server. Our results show that this significantly improves upon the robustness of models even when the signal-to-noise ratio is low
Towards an AI-Driven Universal Anti-Jamming Solution with Convolutional Interference Cancellation Network
Mar 18, 2022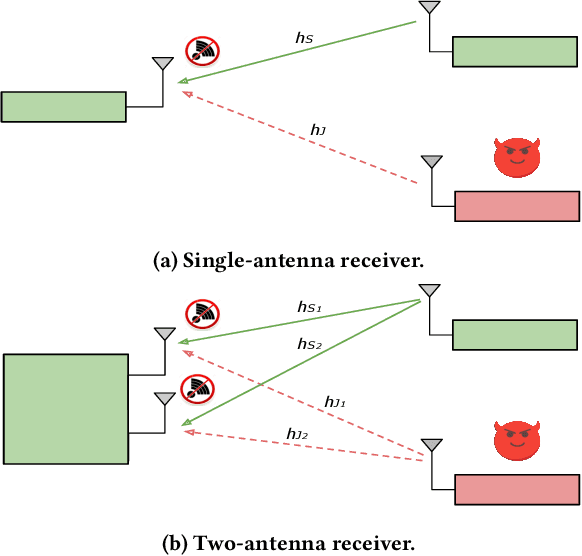
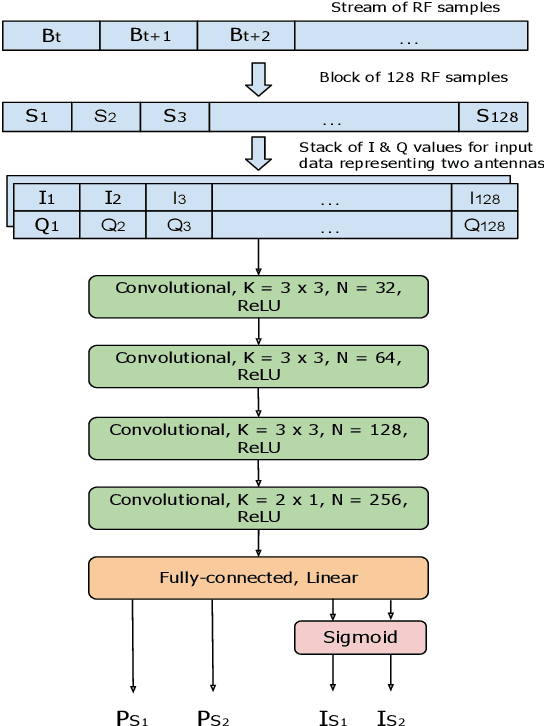


Wireless links are increasingly used to deliver critical services, while intentional interference (jamming) remains a very serious threat to such services. In this paper, we are concerned with the design and evaluation of a universal anti-jamming building block, that is agnostic to the specifics of the communication link and can therefore be combined with existing technologies. We believe that such a block should not require explicit probes, sounding, training sequences, channel estimation, or even the cooperation of the transmitter. To meet these requirements, we propose an approach that relies on advances in Machine Learning, and the promises of neural accelerators and software defined radios. We identify and address multiple challenges, resulting in a convolutional neural network architecture and models for a multi-antenna system to infer the existence of interference, the number of interfering emissions and their respective phases. This information is continuously fed into an algorithm that cancels the interfering signal. We develop a two-antenna prototype system and evaluate our jamming cancellation approach in various environment settings and modulation schemes using Software Defined Radio platforms. We demonstrate that the receiving node equipped with our approach can detect a jammer with over 99% of accuracy and achieve a Bit Error Rate (BER) as low as $10^{-6}$ even when the jammer power is nearly two orders of magnitude (18 dB) higher than the legitimate signal, and without requiring modifications to the link modulation. In non-adversarial settings, our approach can have other advantages such as detecting and mitigating collisions.
Generation of data on discontinuous manifolds via continuous stochastic non-invertible networks
Dec 17, 2021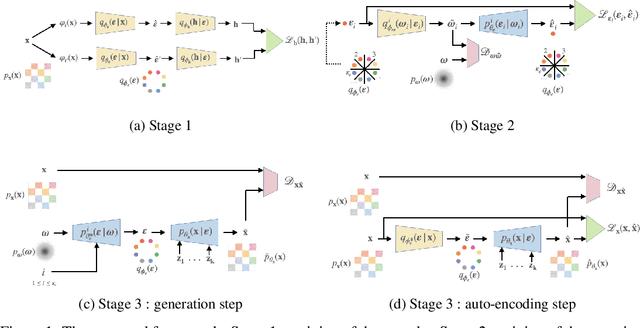
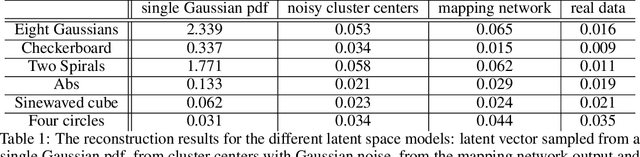
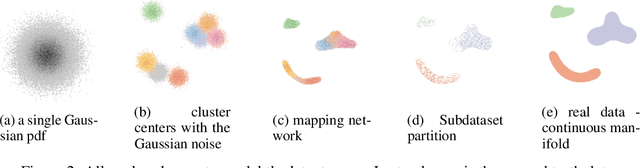

The generation of discontinuous distributions is a difficult task for most known frameworks such as generative autoencoders and generative adversarial networks. Generative non-invertible models are unable to accurately generate such distributions, require long training and often are subject to mode collapse. Variational autoencoders (VAEs), which are based on the idea of keeping the latent space to be Gaussian for the sake of a simple sampling, allow an accurate reconstruction, while they experience significant limitations at generation task. In this work, instead of trying to keep the latent space to be Gaussian, we use a pre-trained contrastive encoder to obtain a clustered latent space. Then, for each cluster, representing a unimodal submanifold, we train a dedicated low complexity network to generate this submanifold from the Gaussian distribution. The proposed framework is based on the information-theoretic formulation of mutual information maximization between the input data and latent space representation. We derive a link between the cost functions and the information-theoretic formulation. We apply our approach to synthetic 2D distributions to demonstrate both reconstruction and generation of discontinuous distributions using continuous stochastic networks.
VISTA: Boosting 3D Object Detection via Dual Cross-VIew SpaTial Attention
Mar 18, 2022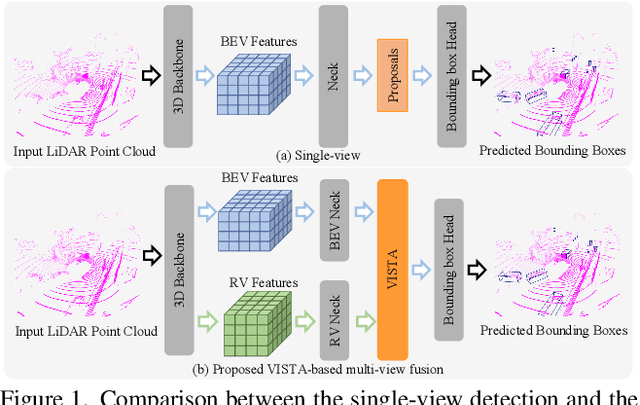
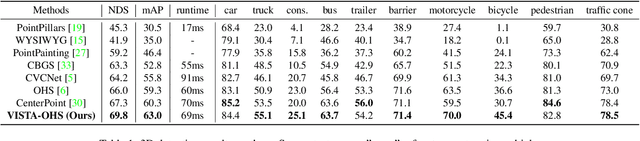
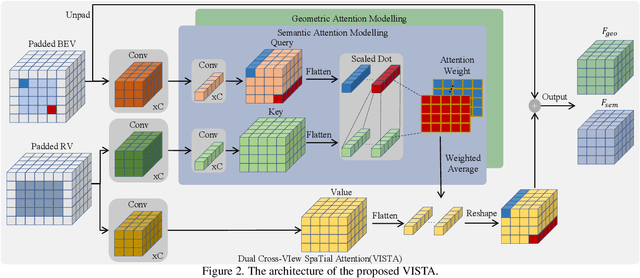
Detecting objects from LiDAR point clouds is of tremendous significance in autonomous driving. In spite of good progress, accurate and reliable 3D detection is yet to be achieved due to the sparsity and irregularity of LiDAR point clouds. Among existing strategies, multi-view methods have shown great promise by leveraging the more comprehensive information from both bird's eye view (BEV) and range view (RV). These multi-view methods either refine the proposals predicted from single view via fused features, or fuse the features without considering the global spatial context; their performance is limited consequently. In this paper, we propose to adaptively fuse multi-view features in a global spatial context via Dual Cross-VIew SpaTial Attention (VISTA). The proposed VISTA is a novel plug-and-play fusion module, wherein the multi-layer perceptron widely adopted in standard attention modules is replaced with a convolutional one. Thanks to the learned attention mechanism, VISTA can produce fused features of high quality for prediction of proposals. We decouple the classification and regression tasks in VISTA, and an additional constraint of attention variance is applied that enables the attention module to focus on specific targets instead of generic points. We conduct thorough experiments on the benchmarks of nuScenes and Waymo; results confirm the efficacy of our designs. At the time of submission, our method achieves 63.0% in overall mAP and 69.8% in NDS on the nuScenes benchmark, outperforming all published methods by up to 24% in safety-crucial categories such as cyclist. The source code in PyTorch is available at https://github.com/Gorilla-Lab-SCUT/VISTA
Toward Fully Automated Robotic Platform for Remote Auscultation
Jan 14, 2022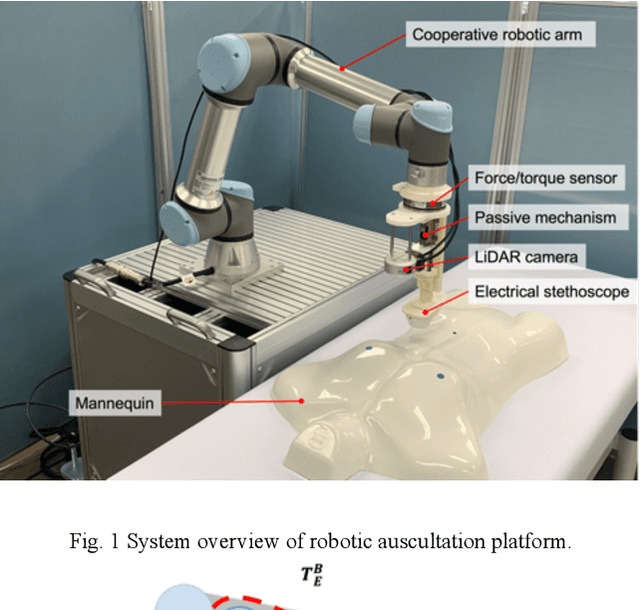
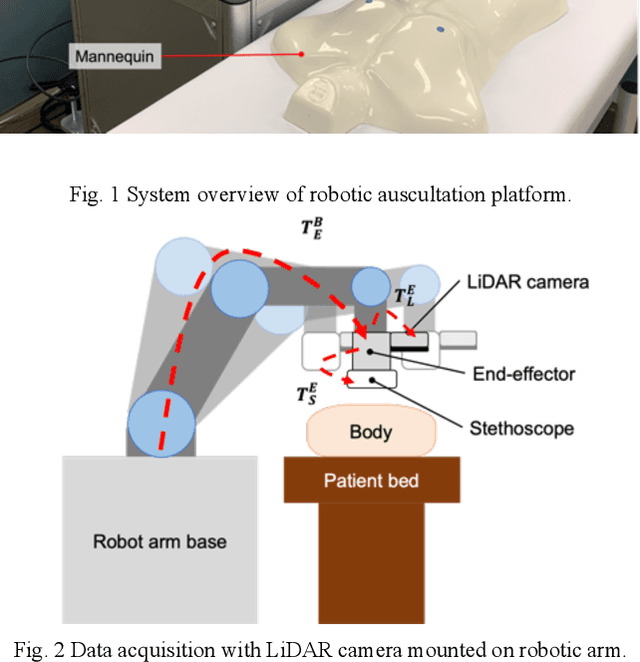
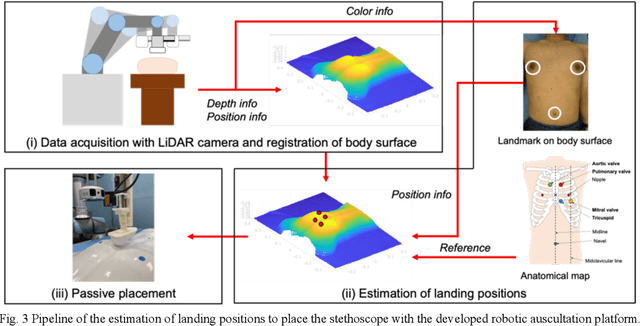
Since most developed countries are facing an increase in the number of patients per healthcare worker due to a declining birth rate and an aging population, relatively simple and safe diagnosis tasks may need to be performed using robotics and automation technologies, without specialists and hospitals. This study presents an automated robotic platform for remote auscultation, which is a highly cost-effective screening tool for detecting abnormal clinical signs. The developed robotic platform is composed of a 6-degree-of-freedom cooperative robotic arm, light detection and ranging (LiDAR) camera, and a spring-based mechanism holding an electric stethoscope. The platform enables autonomous stethoscope positioning based on external body information acquired using the LiDAR camera-based multi-way registration; the platform also ensures safe and flexible contact, maintaining the contact force within a certain range through the passive mechanism. Our preliminary results confirm that the robotic platform enables estimation of the landing positions required for cardiac examinations based on the depth and landmark information of the body surface. It also handles the stethoscope while maintaining the contact force without relying on the push-in displacement by the robotic arm.
HiSTGNN: Hierarchical Spatio-temporal Graph Neural Networks for Weather Forecasting
Jan 22, 2022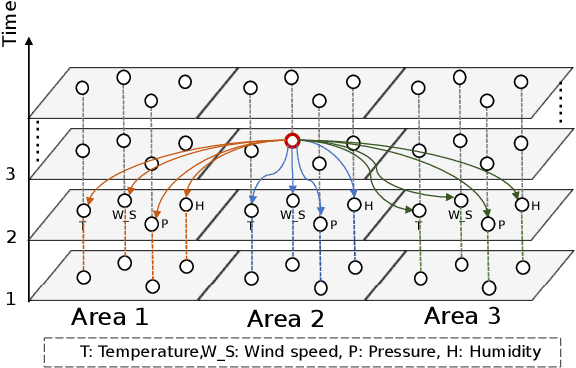
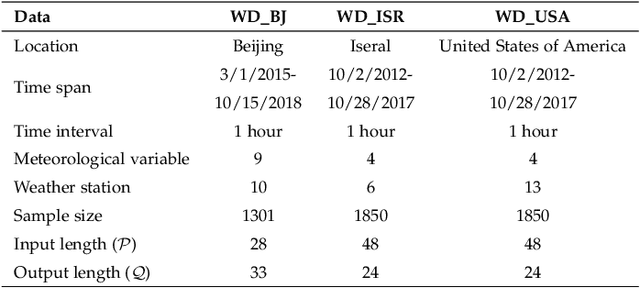
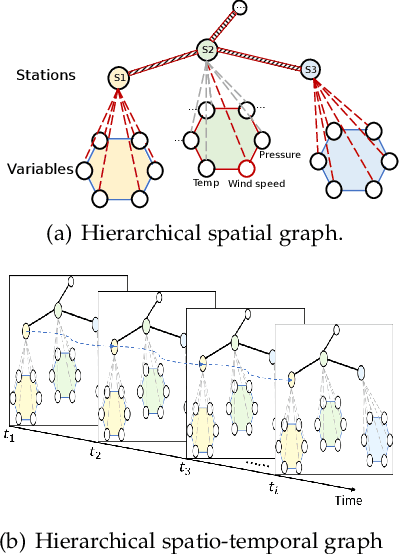
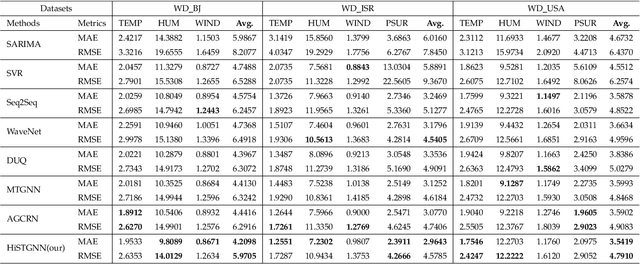
Weather Forecasting is an attractive challengeable task due to its influence on human life and complexity in atmospheric motion. Supported by massive historical observed time series data, the task is suitable for data-driven approaches, especially deep neural networks. Recently, the Graph Neural Networks (GNNs) based methods have achieved excellent performance for spatio-temporal forecasting. However, the canonical GNNs-based methods only individually model the local graph of meteorological variables per station or the global graph of whole stations, lacking information interaction between meteorological variables in different stations. In this paper, we propose a novel Hierarchical Spatio-Temporal Graph Neural Network (HiSTGNN) to model cross-regional spatio-temporal correlations among meteorological variables in multiple stations. An adaptive graph learning layer and spatial graph convolution are employed to construct self-learning graph and study hidden dependency among nodes of variable-level and station-level graph. For capturing temporal pattern, the dilated inception as the backbone of gate temporal convolution is designed to model long and various meteorological trends. Moreover, a dynamic interaction learning is proposed to build bidirectional information passing in hierarchical graph. Experimental results on three real-world meteorological datasets demonstrate the superior performance of HiSTGNN beyond 7 baselines and it reduces the errors by 4.2% to 11.6% especially compared to state-of-the-art weather forecasting method.