 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
AutoSpeed: A Linked Autoencoder Approach for Pulse-Echo Speed-of-Sound Imaging for Medical Ultrasound
Jul 04, 2022
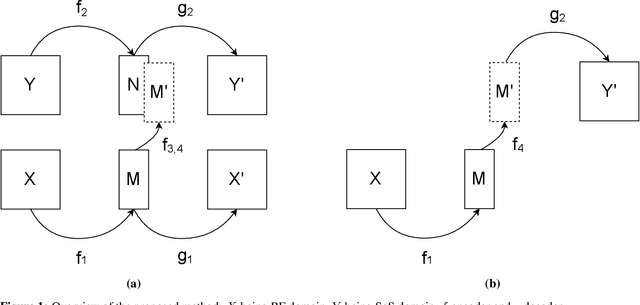
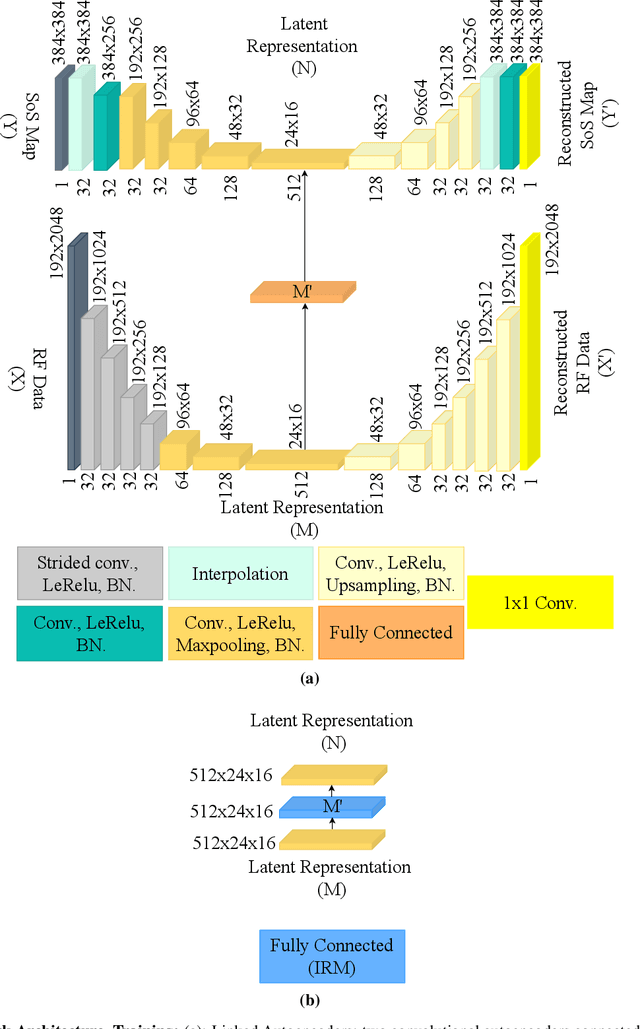
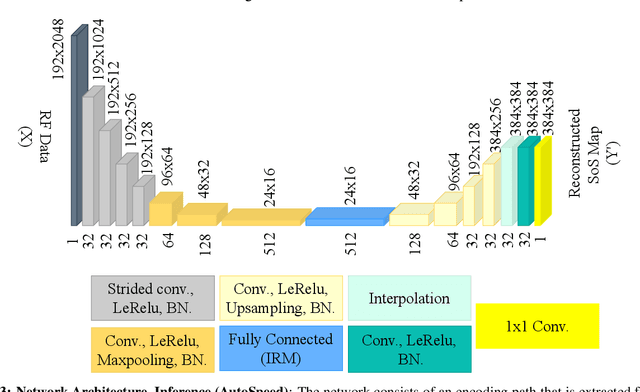
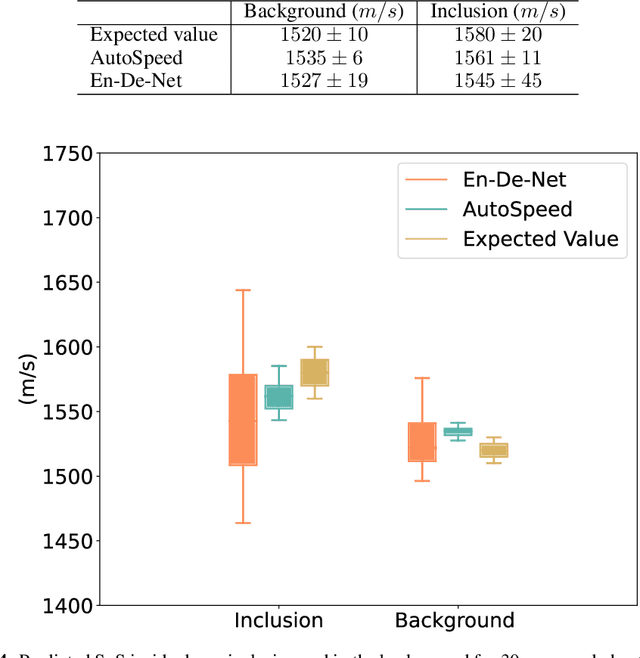
Quantitative ultrasound, e.g., speed-of-sound (SoS) in tissues, provides information about tissue properties that have diagnostic value. Recent studies showed the possibility of extracting SoS information from pulse-echo ultrasound raw data (a.k.a. RF data) using deep neural networks that are fully trained on simulated data. These methods take sensor domain data, i.e., RF data, as input and train a network in an end-to-end fashion to learn the implicit mapping between the RF data domain and SoS domain. However, such networks are prone to overfitting to simulated data which results in poor performance and instability when tested on measured data. We propose a novel method for SoS mapping employing learned representations from two linked autoencoders. We test our approach on simulated and measured data acquired from human breast mimicking phantoms. We show that SoS mapping is possible using linked autoencoders. The proposed method has a Mean Absolute Percentage Error (MAPE) of 2.39% on the simulated data. On the measured data, the predictions of the proposed method are close to the expected values with MAPE of 1.1%. Compared to an end-to-end trained network, the proposed method shows higher stability and reproducibility.
Partially Distributed Beamforming Design for RIS-Aided Cell-Free Networks
Aug 10, 2022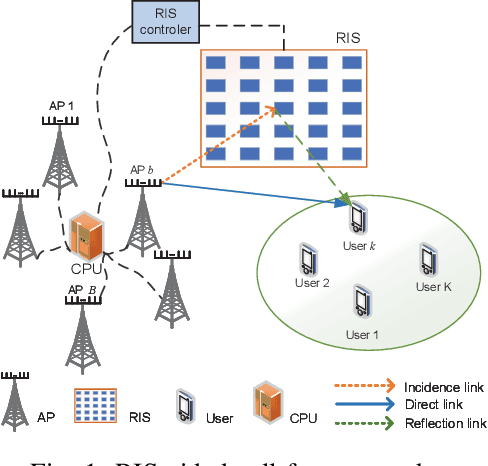
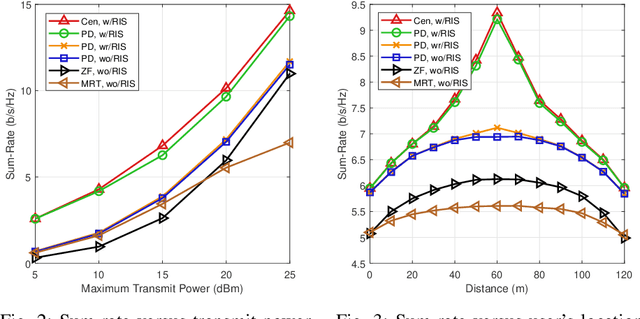
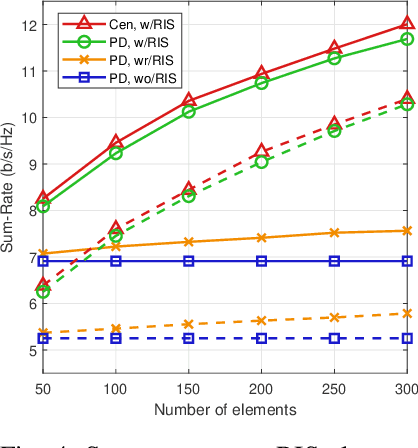
Cell-free networks are regarded as a promising technology to meet higher rate requirements for beyond fifth-generation (5G) communications. Most works on cell-free networks focus on either fully centralized beamforming to maximally enhance system performance, or fully distributed beamforming to avoid extensive channel state information (CSI) exchange among access points (APs). In order to achieve both network capacity improvement and CSI exchange reduction, we propose a partially distributed beamforming design algorithm for reconfigurable intelligent surface (RIS)-aided cell-free networks. We aim at maximizing the weighted sum-rate of all users by designing active and passive beamforming subject to transmit power constraints of APs and unit-modulus constraints of RIS elements. The weighted sum-rate maximization problem is first transformed into an equivalent weighted sum-mean-square-error (sum-MSE) minimization problem, and then alternating optimization (AO) approach is adopted to iteratively design active and passive beamformer. Specifically, active beamforming vectors are obtained by local APs and passive beamforming vector is optimized by central processing unit (CPU). Numerical results not only illustrate the proposed partially distributed algorithm achieves the remarkable performance improvement compared with conventional local beamforming methods, but also further show the considerable potential of deploying RIS in cell-free networks.
Physical Computing for Materials Acceleration Platforms
Aug 17, 2022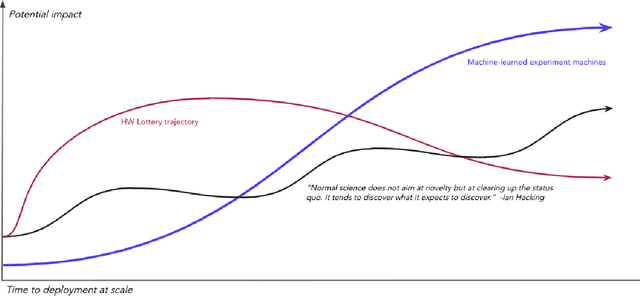
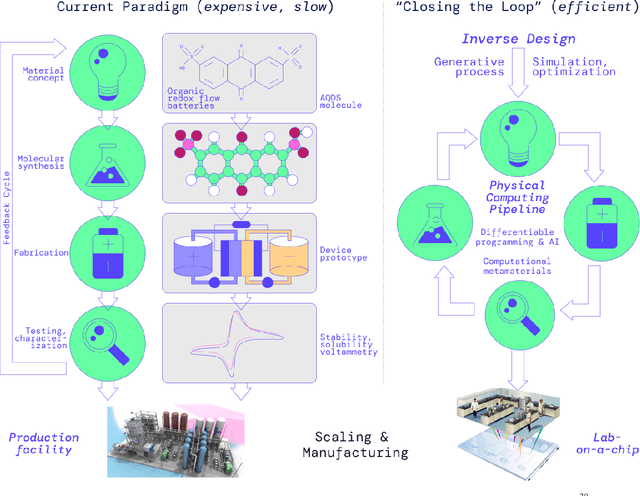
A ''technology lottery'' describes a research idea or technology succeeding over others because it is suited to the available software and hardware, not necessarily because it is superior to alternative directions--examples abound, from the synergies of deep learning and GPUs to the disconnect of urban design and autonomous vehicles. The nascent field of Self-Driving Laboratories (SDL), particularly those implemented as Materials Acceleration Platforms (MAPs), is at risk of an analogous pitfall: the next logical step for building MAPs is to take existing lab equipment and workflows and mix in some AI and automation. In this whitepaper, we argue that the same simulation and AI tools that will accelerate the search for new materials, as part of the MAPs research program, also make possible the design of fundamentally new computing mediums. We need not be constrained by existing biases in science, mechatronics, and general-purpose computing, but rather we can pursue new vectors of engineering physics with advances in cyber-physical learning and closed-loop, self-optimizing systems. Here we outline a simulation-based MAP program to design computers that use physics itself to solve optimization problems. Such systems mitigate the hardware-software-substrate-user information losses present in every other class of MAPs and they perfect alignment between computing problems and computing mediums eliminating any technology lottery. We offer concrete steps toward early ''Physical Computing (PC) -MAP'' advances and the longer term cyber-physical R&D which we expect to introduce a new era of innovative collaboration between materials researchers and computer scientists.
One-Shot Medical Landmark Localization by Edge-Guided Transform and Noisy Landmark Refinement
Jul 31, 2022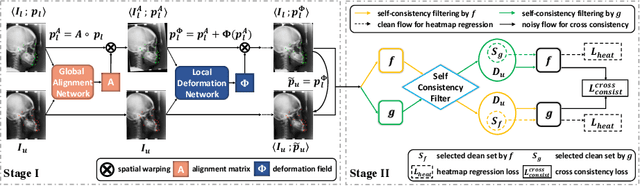
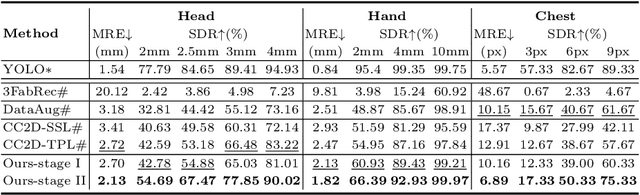
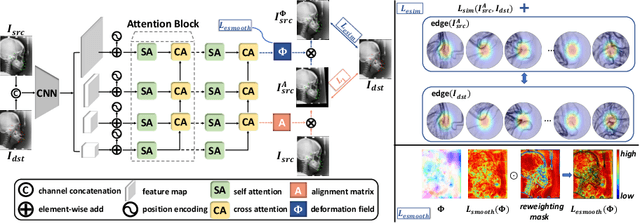
As an important upstream task for many medical applications, supervised landmark localization still requires non-negligible annotation costs to achieve desirable performance. Besides, due to cumbersome collection procedures, the limited size of medical landmark datasets impacts the effectiveness of large-scale self-supervised pre-training methods. To address these challenges, we propose a two-stage framework for one-shot medical landmark localization, which first infers landmarks by unsupervised registration from the labeled exemplar to unlabeled targets, and then utilizes these noisy pseudo labels to train robust detectors. To handle the significant structure variations, we learn an end-to-end cascade of global alignment and local deformations, under the guidance of novel loss functions which incorporate edge information. In stage II, we explore self-consistency for selecting reliable pseudo labels and cross-consistency for semi-supervised learning. Our method achieves state-of-the-art performances on public datasets of different body parts, which demonstrates its general applicability.
Where is VALDO? VAscular Lesions Detection and segmentatiOn challenge at MICCAI 2021
Aug 15, 2022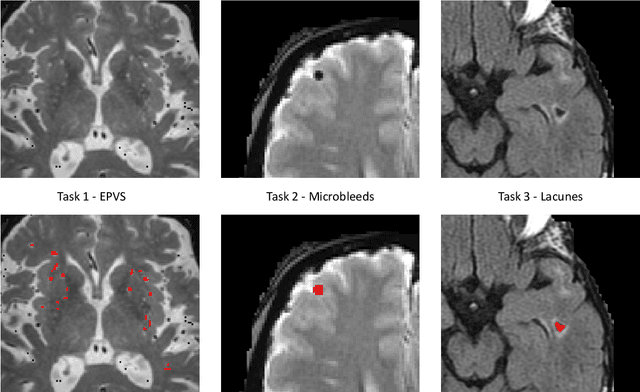
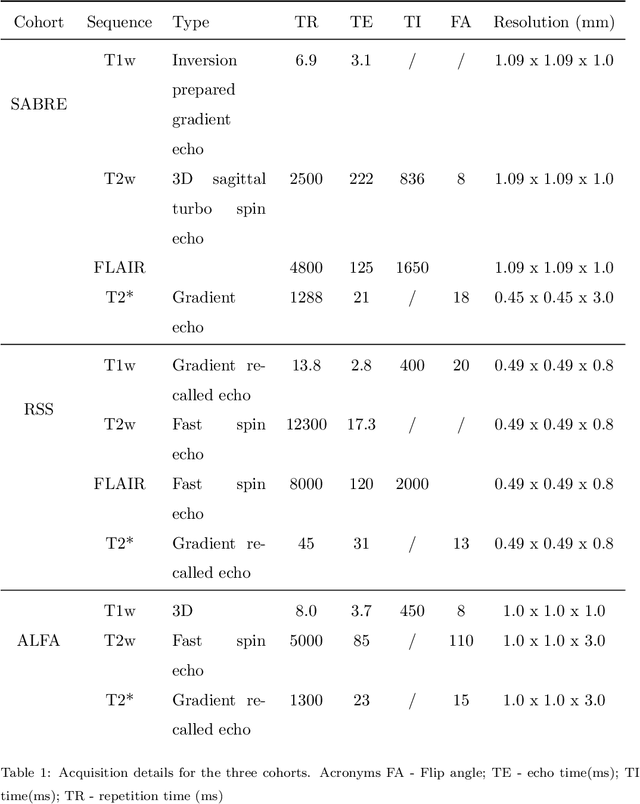
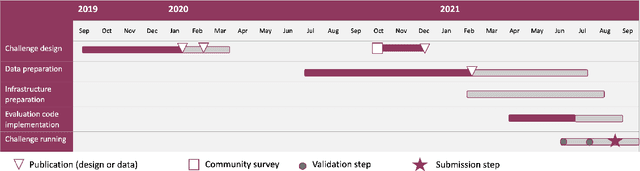
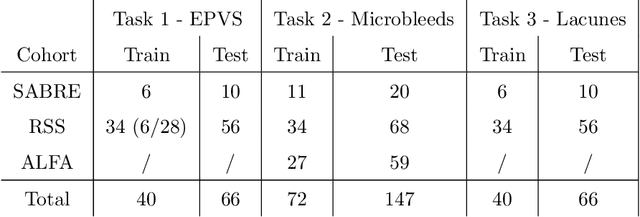
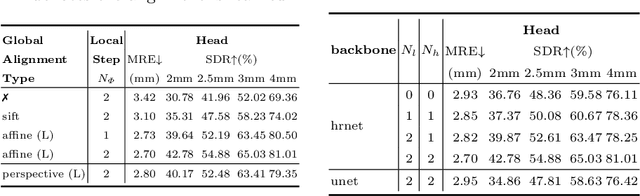
Imaging markers of cerebral small vessel disease provide valuable information on brain health, but their manual assessment is time-consuming and hampered by substantial intra- and interrater variability. Automated rating may benefit biomedical research, as well as clinical assessment, but diagnostic reliability of existing algorithms is unknown. Here, we present the results of the \textit{VAscular Lesions DetectiOn and Segmentation} (\textit{Where is VALDO?}) challenge that was run as a satellite event at the international conference on Medical Image Computing and Computer Aided Intervention (MICCAI) 2021. This challenge aimed to promote the development of methods for automated detection and segmentation of small and sparse imaging markers of cerebral small vessel disease, namely enlarged perivascular spaces (EPVS) (Task 1), cerebral microbleeds (Task 2) and lacunes of presumed vascular origin (Task 3) while leveraging weak and noisy labels. Overall, 12 teams participated in the challenge proposing solutions for one or more tasks (4 for Task 1 - EPVS, 9 for Task 2 - Microbleeds and 6 for Task 3 - Lacunes). Multi-cohort data was used in both training and evaluation. Results showed a large variability in performance both across teams and across tasks, with promising results notably for Task 1 - EPVS and Task 2 - Microbleeds and not practically useful results yet for Task 3 - Lacunes. It also highlighted the performance inconsistency across cases that may deter use at an individual level, while still proving useful at a population level.
PVO: Panoptic Visual Odometry
Jul 04, 2022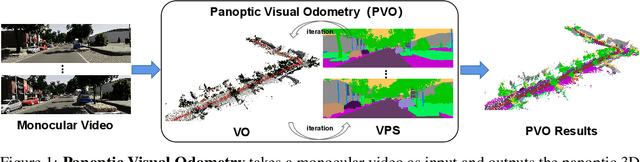
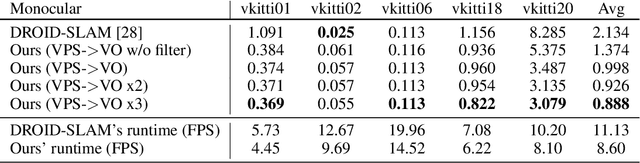
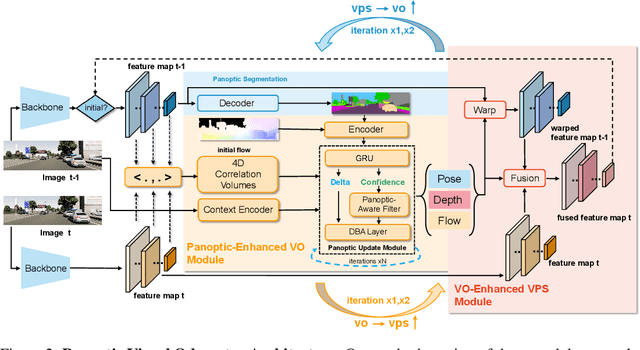

We present a novel panoptic visual odometry framework, termed PVO, to achieve a more comprehensive modeling of the scene's motion, geometry, and panoptic segmentation information. PVO models visual odometry (VO) and video panoptic segmentation (VPS) in a unified view, enabling the two tasks to facilitate each other. Specifically, we introduce a panoptic update module into the VO module, which operates on the image panoptic segmentation. This Panoptic-Enhanced VO module can trim the interference of dynamic objects in the camera pose estimation by adjusting the weights of optimized camera poses. On the other hand, the VO-Enhanced VPS module improves the segmentation accuracy by fusing the panoptic segmentation result of the current frame on the fly to the adjacent frames, using geometric information such as camera pose, depth, and optical flow obtained from the VO module. These two modules contribute to each other through a recurrent iterative optimization. Extensive experiments demonstrate that PVO outperforms state-of-the-art methods in both visual odometry and video panoptic segmentation tasks. Code and data are available on the project webpage: \urlstyle{tt} \textcolor{url_color}{\url{https://zju3dv.github.io/pvo/}}.
Contrastive Learning of Features between Images and LiDAR
Jun 24, 2022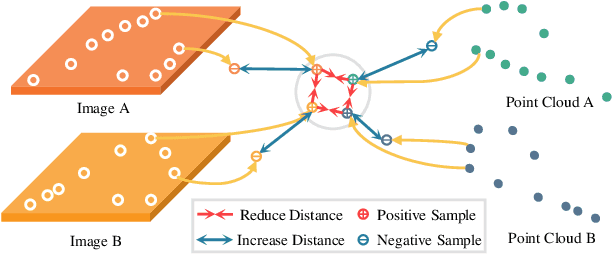
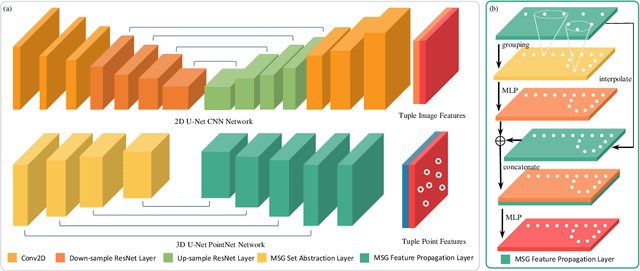

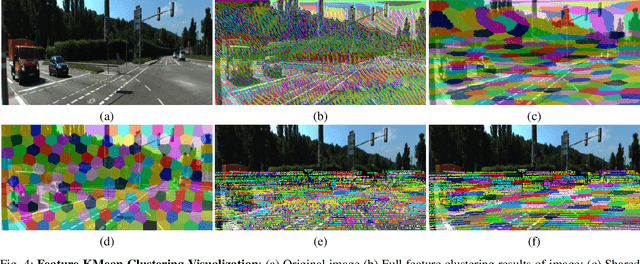
Image and Point Clouds provide different information for robots. Finding the correspondences between data from different sensors is crucial for various tasks such as localization, mapping, and navigation. Learning-based descriptors have been developed for single sensors; there is little work on cross-modal features. This work treats learning cross-modal features as a dense contrastive learning problem. We propose a Tuple-Circle loss function for cross-modality feature learning. Furthermore, to learn good features and not lose generality, we developed a variant of widely used PointNet++ architecture for point cloud and U-Net CNN architecture for images. Moreover, we conduct experiments on a real-world dataset to show the effectiveness of our loss function and network structure. We show that our models indeed learn information from both images as well as LiDAR by visualizing the features.
TagRec++: Hierarchical Label Aware Attention Network for Question Categorization
Aug 10, 2022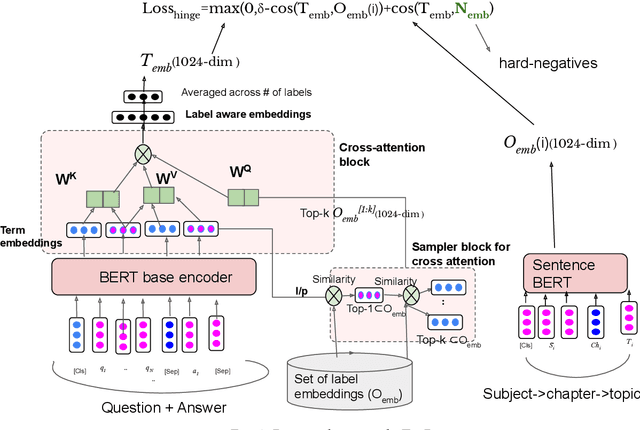
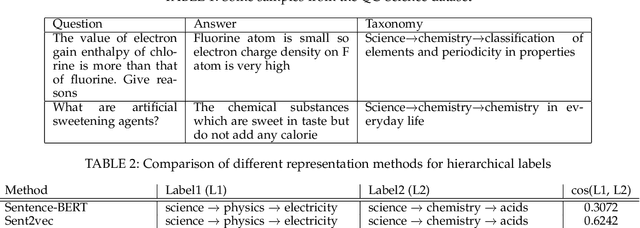
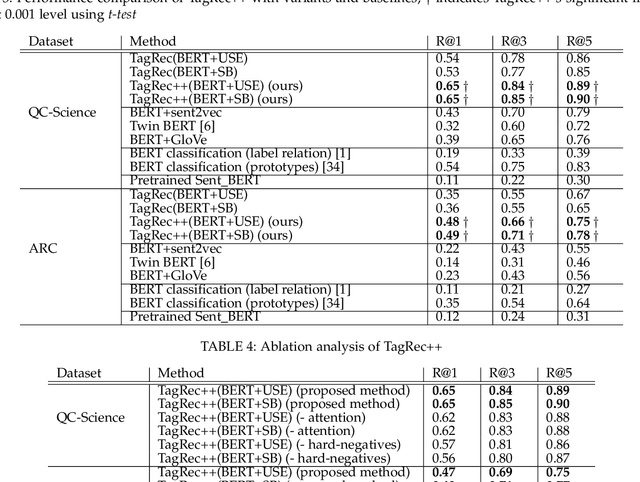
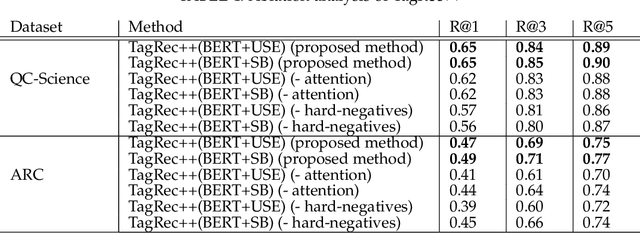
Online learning systems have multiple data repositories in the form of transcripts, books and questions. To enable ease of access, such systems organize the content according to a well defined taxonomy of hierarchical nature (subject-chapter-topic). The task of categorizing inputs to the hierarchical labels is usually cast as a flat multi-class classification problem. Such approaches ignore the semantic relatedness between the terms in the input and the tokens in the hierarchical labels. Alternate approaches also suffer from class imbalance when they only consider leaf level nodes as labels. To tackle the issues, we formulate the task as a dense retrieval problem to retrieve the appropriate hierarchical labels for each content. In this paper, we deal with categorizing questions. We model the hierarchical labels as a composition of their tokens and use an efficient cross-attention mechanism to fuse the information with the term representations of the content. We also propose an adaptive in-batch hard negative sampling approach which samples better negatives as the training progresses. We demonstrate that the proposed approach \textit{TagRec++} outperforms existing state-of-the-art approaches on question datasets as measured by Recall@k. In addition, we demonstrate zero-shot capabilities of \textit{TagRec++} and ability to adapt to label changes.
Deep Reinforcement Learning for Dynamic Recommendation with Model-agnostic Counterfactual Policy Synthesis
Aug 10, 2022
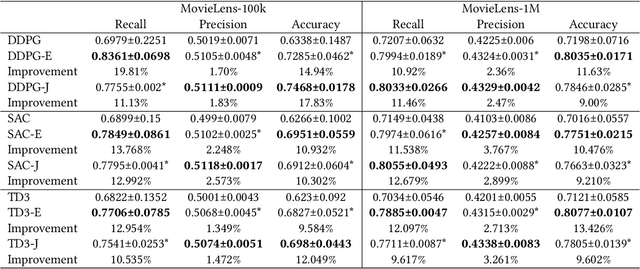
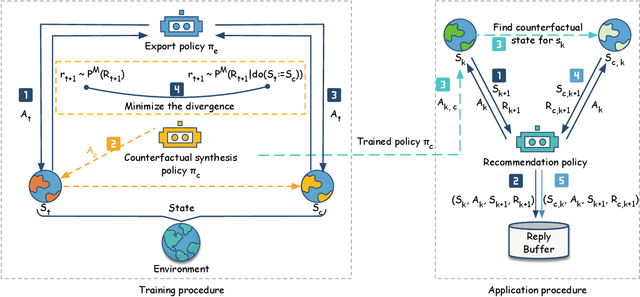
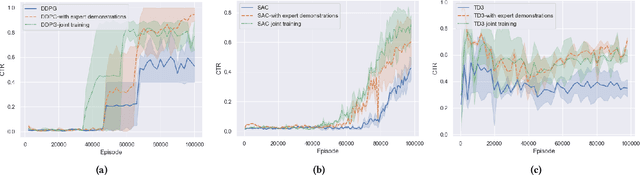
Recent advances in recommender systems have proved the potential of Reinforcement Learning (RL) to handle the dynamic evolution processes between users and recommender systems. However, learning to train an optimal RL agent is generally impractical with commonly sparse user feedback data in the context of recommender systems. To circumvent the lack of interaction of current RL-based recommender systems, we propose to learn a general Model-agnostic Counterfactual Synthesis Policy for counterfactual user interaction data augmentation. The counterfactual synthesis policy aims to synthesise counterfactual states while preserving significant information in the original state relevant to the user's interests, building upon two different training approaches we designed: learning with expert demonstrations and joint training. As a result, the synthesis of each counterfactual data is based on the current recommendation agent interaction with the environment to adapt to users' dynamic interests. We integrate the proposed policy Deep Deterministic Policy Gradient (DDPG), Soft Actor Critic (SAC) and Twin Delayed DDPG in an adaptive pipeline with a recommendation agent that can generate counterfactual data to improve the performance of recommendation. The empirical results on both online simulation and offline datasets demonstrate the effectiveness and generalisation of our counterfactual synthesis policy and verify that it improves the performance of RL recommendation agents.
SemMAE: Semantic-Guided Masking for Learning Masked Autoencoders
Jun 21, 2022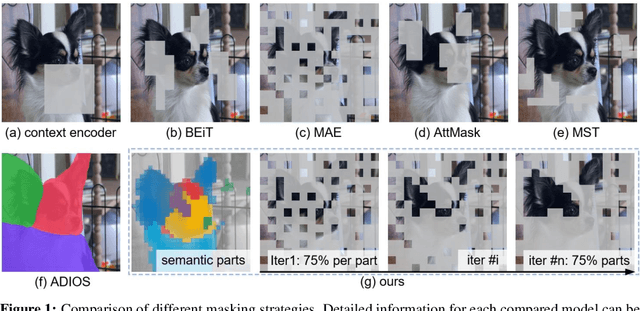

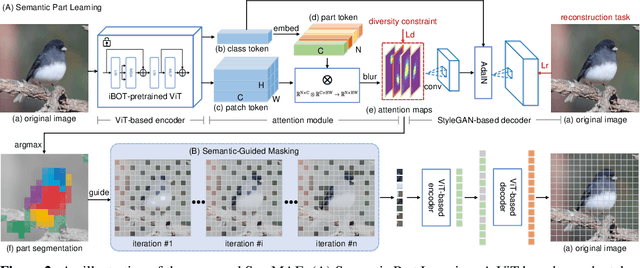
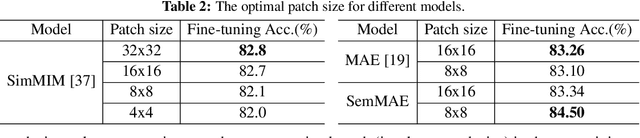
Recently, significant progress has been made in masked image modeling to catch up to masked language modeling. However, unlike words in NLP, the lack of semantic decomposition of images still makes masked autoencoding (MAE) different between vision and language. In this paper, we explore a potential visual analogue of words, i.e., semantic parts, and we integrate semantic information into the training process of MAE by proposing a Semantic-Guided Masking strategy. Compared to widely adopted random masking, our masking strategy can gradually guide the network to learn various information, i.e., from intra-part patterns to inter-part relations. In particular, we achieve this in two steps. 1) Semantic part learning: we design a self-supervised part learning method to obtain semantic parts by leveraging and refining the multi-head attention of a ViT-based encoder. 2) Semantic-guided MAE (SemMAE) training: we design a masking strategy that varies from masking a portion of patches in each part to masking a portion of (whole) parts in an image. Extensive experiments on various vision tasks show that SemMAE can learn better image representation by integrating semantic information. In particular, SemMAE achieves 84.5% fine-tuning accuracy on ImageNet-1k, which outperforms the vanilla MAE by 1.4%. In the semantic segmentation and fine-grained recognition tasks, SemMAE also brings significant improvements and yields the state-of-the-art performance.