 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Open-Vocabulary Multi-Label Classification via Multi-modal Knowledge Transfer
Jul 05, 2022
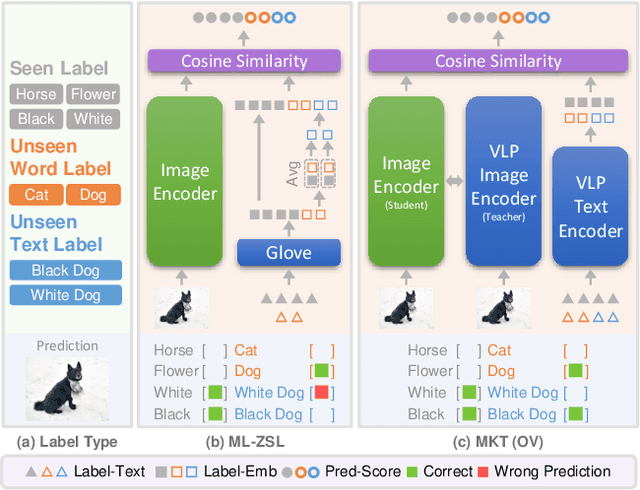



Real-world recognition system often encounters a plenty of unseen labels in practice. To identify such unseen labels, multi-label zero-shot learning (ML-ZSL) focuses on transferring knowledge by a pre-trained textual label embedding (e.g., GloVe). However, such methods only exploit singlemodal knowledge from a language model, while ignoring the rich semantic information inherent in image-text pairs. Instead, recently developed open-vocabulary (OV) based methods succeed in exploiting such information of image-text pairs in object detection, and achieve impressive performance. Inspired by the success of OV-based methods, we propose a novel open-vocabulary framework, named multimodal knowledge transfer (MKT), for multi-label classification. Specifically, our method exploits multi-modal knowledge of image-text pairs based on a vision and language pretraining (VLP) model. To facilitate transferring the imagetext matching ability of VLP model, knowledge distillation is used to guarantee the consistency of image and label embeddings, along with prompt tuning to further update the label embeddings. To further recognize multiple objects, a simple but effective two-stream module is developed to capture both local and global features. Extensive experimental results show that our method significantly outperforms state-of-theart methods on public benchmark datasets. Code will be available at https://github.com/seanhe97/MKT.
Differentially Private Counterfactuals via Functional Mechanism
Aug 04, 2022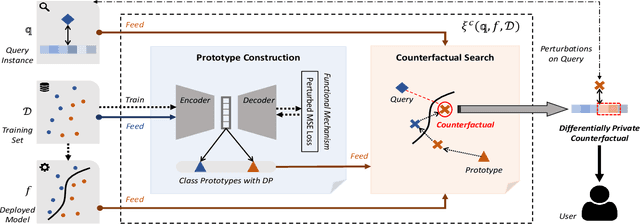
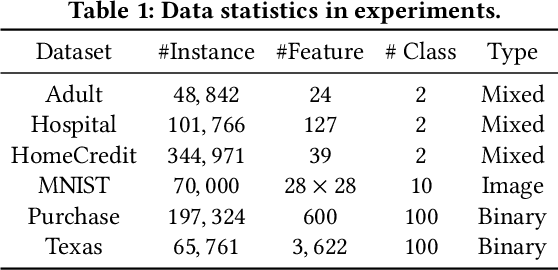
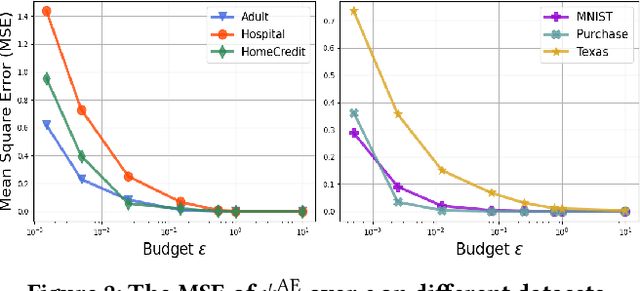
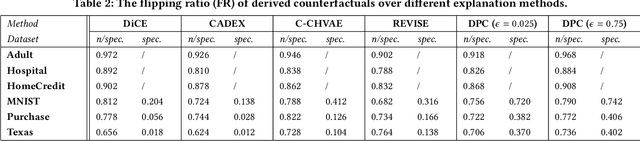
Counterfactual, serving as one emerging type of model explanation, has attracted tons of attentions recently from both industry and academia. Different from the conventional feature-based explanations (e.g., attributions), counterfactuals are a series of hypothetical samples which can flip model decisions with minimal perturbations on queries. Given valid counterfactuals, humans are capable of reasoning under ``what-if'' circumstances, so as to better understand the model decision boundaries. However, releasing counterfactuals could be detrimental, since it may unintentionally leak sensitive information to adversaries, which brings about higher risks on both model security and data privacy. To bridge the gap, in this paper, we propose a novel framework to generate differentially private counterfactual (DPC) without touching the deployed model or explanation set, where noises are injected for protection while maintaining the explanation roles of counterfactual. In particular, we train an autoencoder with the functional mechanism to construct noisy class prototypes, and then derive the DPC from the latent prototypes based on the post-processing immunity of differential privacy. Further evaluations demonstrate the effectiveness of the proposed framework, showing that DPC can successfully relieve the risks on both extraction and inference attacks.
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Jun 23, 2022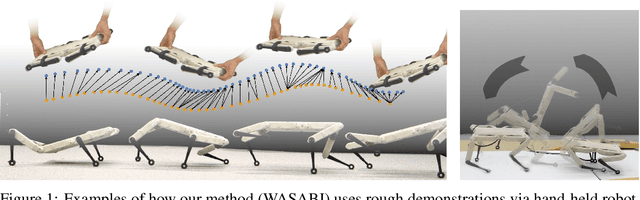
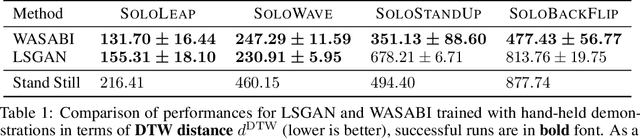
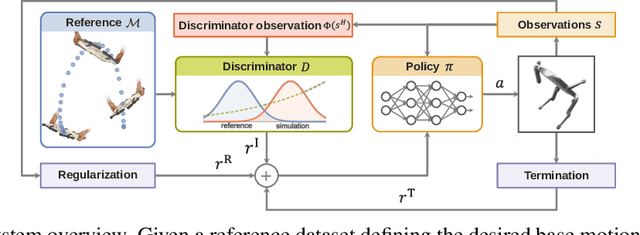

Learning agile skills is one of the main challenges in robotics. To this end, reinforcement learning approaches have achieved impressive results. These methods require explicit task information in terms of a reward function or an expert that can be queried in simulation to provide a target control output, which limits their applicability. In this work, we propose a generative adversarial method for inferring reward functions from partial and potentially physically incompatible demonstrations for successful skill acquirement where reference or expert demonstrations are not easily accessible. Moreover, we show that by using a Wasserstein GAN formulation and transitions from demonstrations with rough and partial information as input, we are able to extract policies that are robust and capable of imitating demonstrated behaviors. Finally, the obtained skills such as a backflip are tested on an agile quadruped robot called Solo 8 and present faithful replication of hand-held human demonstrations.
Estimating Topic Exposure for Under-Represented Users on Social Media
Aug 07, 2022
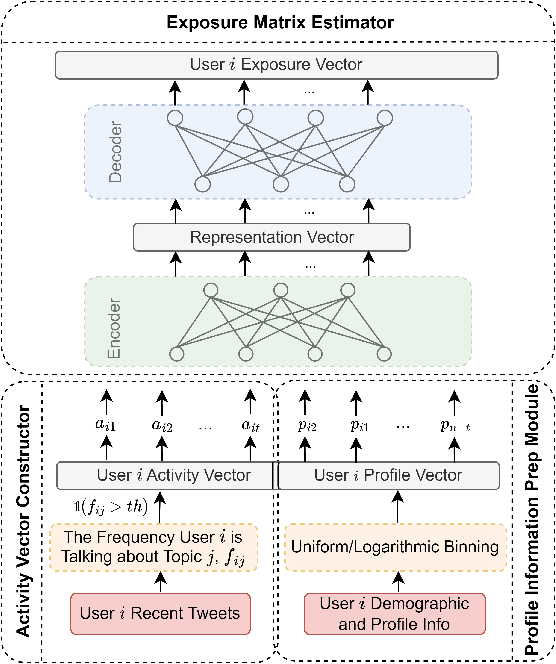
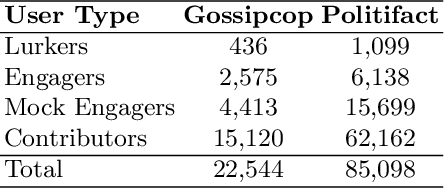

Online Social Networks (OSNs) facilitate access to a variety of data allowing researchers to analyze users' behavior and develop user behavioral analysis models. These models rely heavily on the observed data which is usually biased due to the participation inequality. This inequality consists of three groups of online users: the lurkers - users that solely consume the content, the engagers - users that contribute little to the content creation, and the contributors - users that are responsible for creating the majority of the online content. Failing to consider the contribution of all the groups while interpreting population-level interests or sentiments may yield biased results. To reduce the bias induced by the contributors, in this work, we focus on highlighting the engagers' contributions in the observed data as they are more likely to contribute when compared to lurkers, and they comprise a bigger population as compared to the contributors. The first step in behavioral analysis of these users is to find the topics they are exposed to but did not engage with. To do so, we propose a novel framework that aids in identifying these users and estimates their topic exposure. The exposure estimation mechanism is modeled by incorporating behavioral patterns from similar contributors as well as users' demographic and profile information.
Language Supervised Training for Skeleton-based Action Recognition
Aug 10, 2022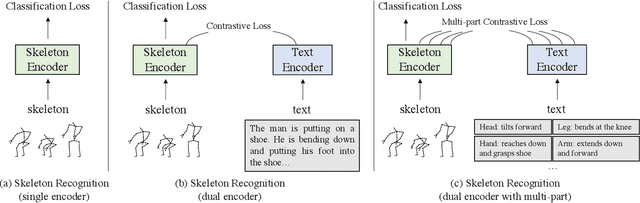
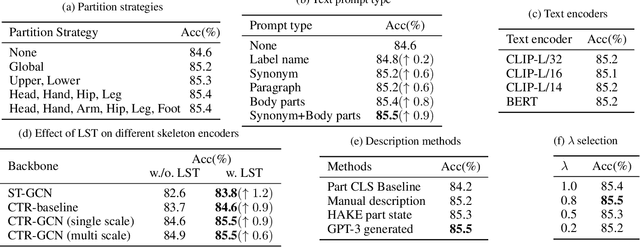
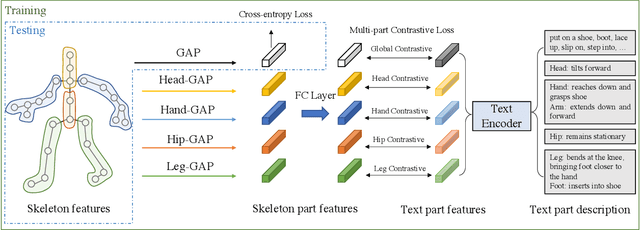
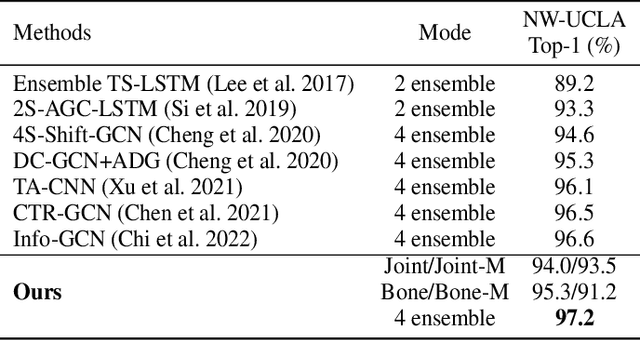
Skeleton-based action recognition has drawn a lot of attention for its computation efficiency and robustness to lighting conditions. Existing skeleton-based action recognition methods are typically formulated as a one-hot classification task without fully utilizing the semantic relations between actions. For example, "make victory sign" and "thumb up" are two actions of hand gestures, whose major difference lies in the movement of hands. This information is agnostic from the categorical one-hot encoding of action classes but could be unveiled in the language description of actions. Therefore, utilizing action language descriptions in training could potentially benefit representation learning. In this work, we propose a Language Supervised Training (LST) approach for skeleton-based action recognition. More specifically, we employ a large-scale language model as the knowledge engine to provide text descriptions for body parts movements of actions, and propose a multi-modal training scheme by utilizing the text encoder to generate feature vectors for different body parts and supervise the skeleton encoder for action representation learning. Experiments show that our proposed LST method achieves noticeable improvements over various baseline models without extra computation cost at inference. LST achieves new state-of-the-arts on popular skeleton-based action recognition benchmarks, including NTU RGB+D, NTU RGB+D 120 and NW-UCLA. The code can be found at https://github.com/MartinXM/LST.
Improving Robustness and Accuracy via Relative Information Encoding in 3D Human Pose Estimation
Jul 29, 2021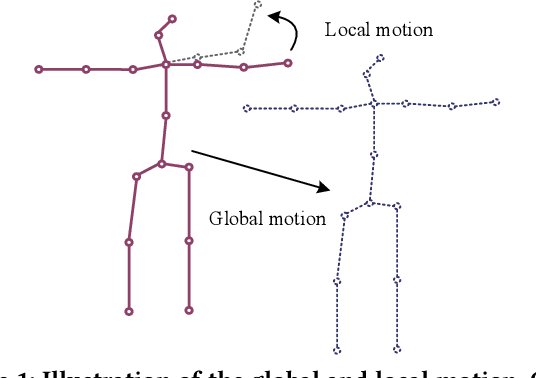
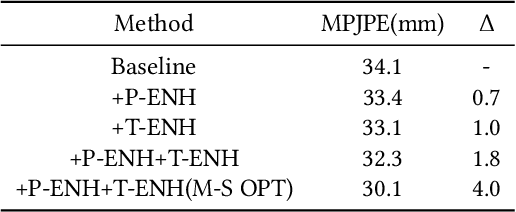
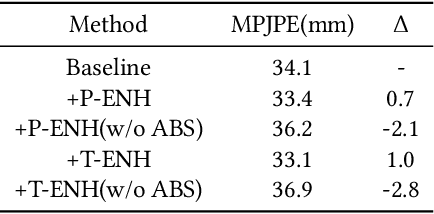
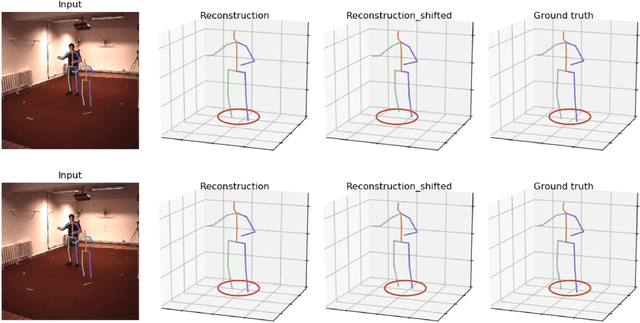
Most of the existing 3D human pose estimation approaches mainly focus on predicting 3D positional relationships between the root joint and other human joints (local motion) instead of the overall trajectory of the human body (global motion). Despite the great progress achieved by these approaches, they are not robust to global motion, and lack the ability to accurately predict local motion with a small movement range. To alleviate these two problems, we propose a relative information encoding method that yields positional and temporal enhanced representations. Firstly, we encode positional information by utilizing relative coordinates of 2D poses to enhance the consistency between the input and output distribution. The same posture with different absolute 2D positions can be mapped to a common representation. It is beneficial to resist the interference of global motion on the prediction results. Second, we encode temporal information by establishing the connection between the current pose and other poses of the same person within a period of time. More attention will be paid to the movement changes before and after the current pose, resulting in better prediction performance on local motion with a small movement range. The ablation studies validate the effectiveness of the proposed relative information encoding method. Besides, we introduce a multi-stage optimization method to the whole framework to further exploit the positional and temporal enhanced representations. Our method outperforms state-of-the-art methods on two public datasets. Code is available at https://github.com/paTRICK-swk/Pose3D-RIE.
TIC: Text-Guided Image Colorization
Aug 04, 2022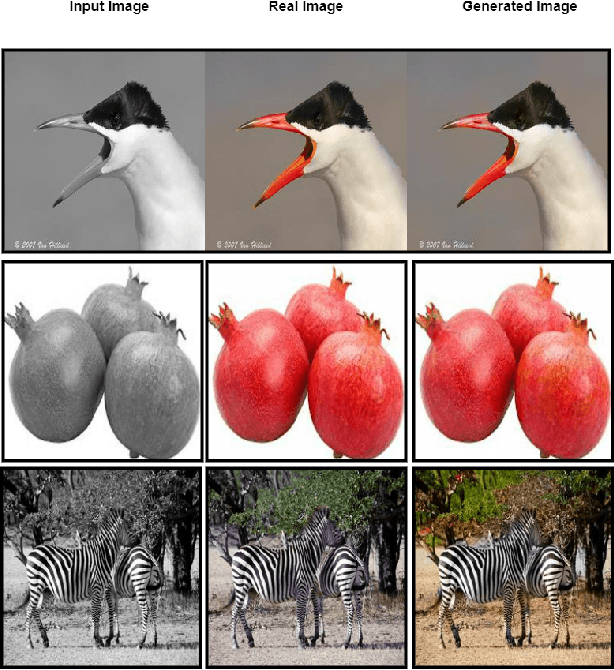

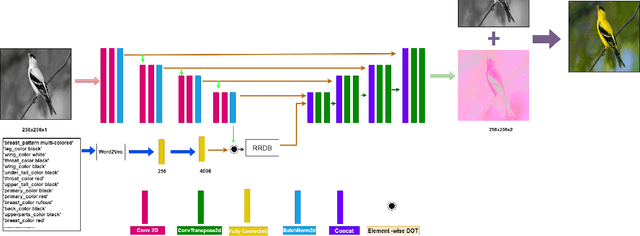
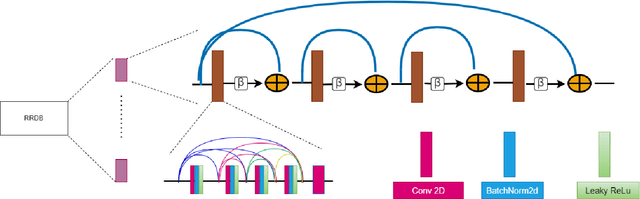
Image colorization is a well-known problem in computer vision. However, due to the ill-posed nature of the task, image colorization is inherently challenging. Though several attempts have been made by researchers to make the colorization pipeline automatic, these processes often produce unrealistic results due to a lack of conditioning. In this work, we attempt to integrate textual descriptions as an auxiliary condition, along with the grayscale image that is to be colorized, to improve the fidelity of the colorization process. To the best of our knowledge, this is one of the first attempts to incorporate textual conditioning in the colorization pipeline. To do so, we have proposed a novel deep network that takes two inputs (the grayscale image and the respective encoded text description) and tries to predict the relevant color gamut. As the respective textual descriptions contain color information of the objects present in the scene, the text encoding helps to improve the overall quality of the predicted colors. We have evaluated our proposed model using different metrics and found that it outperforms the state-of-the-art colorization algorithms both qualitatively and quantitatively.
A Cooperative Perception Environment for Traffic Operations and Control
Aug 04, 2022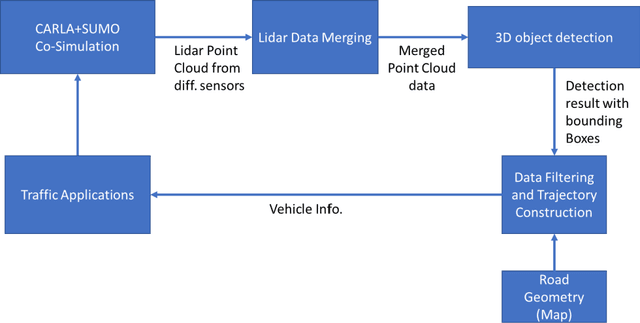

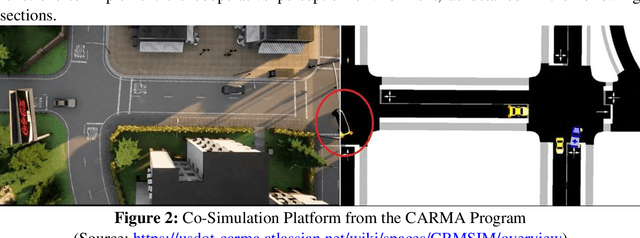

Existing data collection methods for traffic operations and control usually rely on infrastructure-based loop detectors or probe vehicle trajectories. Connected and automated vehicles (CAVs) not only can report data about themselves but also can provide the status of all detected surrounding vehicles. Integration of perception data from multiple CAVs as well as infrastructure sensors (e.g., LiDAR) can provide richer information even under a very low penetration rate. This paper aims to develop a cooperative data collection system, which integrates Lidar point cloud data from both infrastructure and CAVs to create a cooperative perception environment for various transportation applications. The state-of-the-art 3D detection models are applied to detect vehicles in the merged point cloud. We test the proposed cooperative perception environment with the max pressure adaptive signal control model in a co-simulation platform with CARLA and SUMO. Results show that very low penetration rates of CAV plus an infrastructure sensor are sufficient to achieve comparable performance with 30% or higher penetration rates of connected vehicles (CV). We also show the equivalent CV penetration rate (E-CVPR) under different CAV penetration rates to demonstrate the data collection efficiency of the cooperative perception environment.
YOLO-FaceV2: A Scale and Occlusion Aware Face Detector
Aug 04, 2022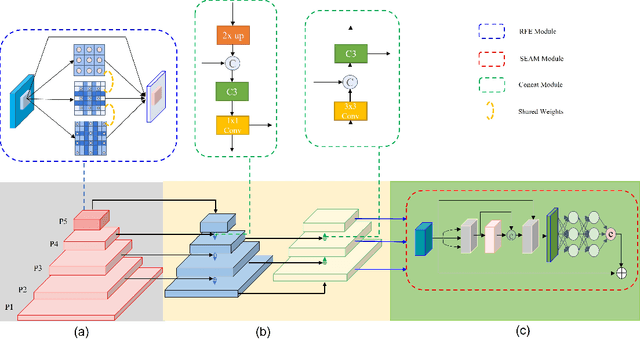
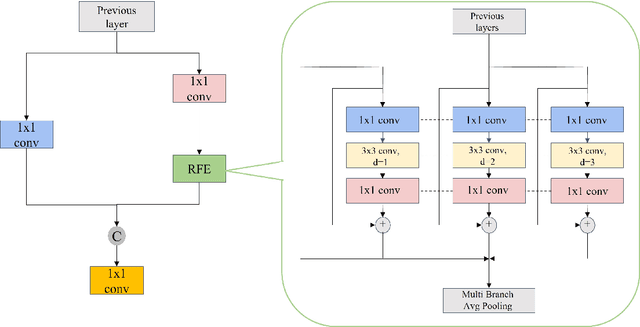
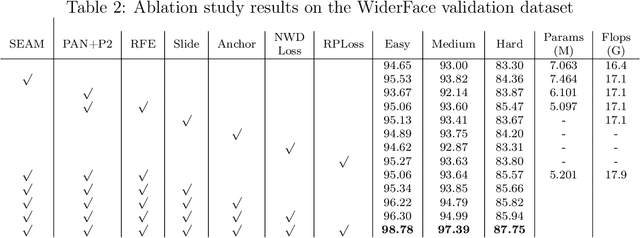
In recent years, face detection algorithms based on deep learning have made great progress. These algorithms can be generally divided into two categories, i.e. two-stage detector like Faster R-CNN and one-stage detector like YOLO. Because of the better balance between accuracy and speed, one-stage detectors have been widely used in many applications. In this paper, we propose a real-time face detector based on the one-stage detector YOLOv5, named YOLO-FaceV2. We design a Receptive Field Enhancement module called RFE to enhance receptive field of small face, and use NWD Loss to make up for the sensitivity of IoU to the location deviation of tiny objects. For face occlusion, we present an attention module named SEAM and introduce Repulsion Loss to solve it. Moreover, we use a weight function Slide to solve the imbalance between easy and hard samples and use the information of the effective receptive field to design the anchor. The experimental results on WiderFace dataset show that our face detector outperforms YOLO and its variants can be find in all easy, medium and hard subsets. Source code in https://github.com/Krasjet-Yu/YOLO-FaceV2
Resilient Active Information Acquisition with Teams of Robots
Mar 17, 2021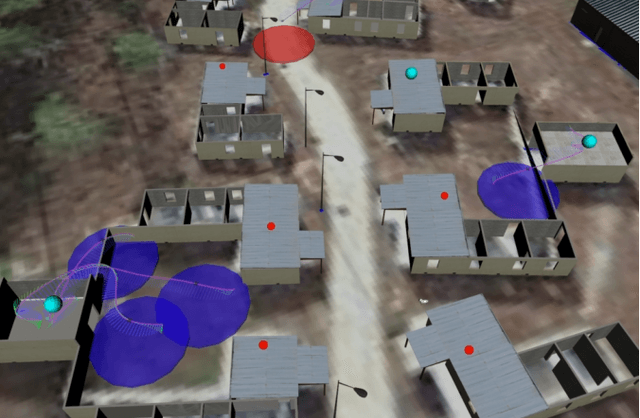
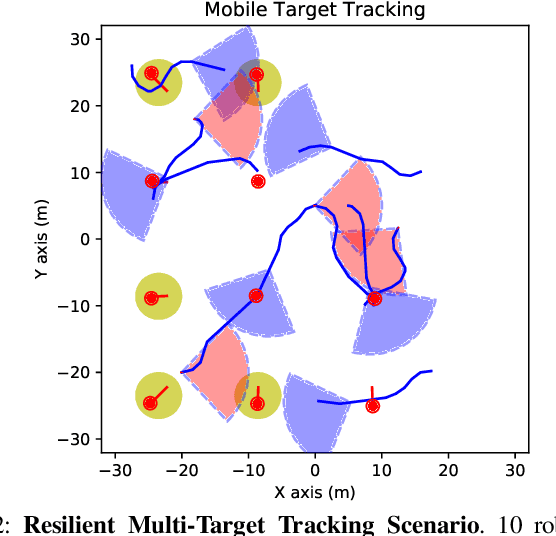
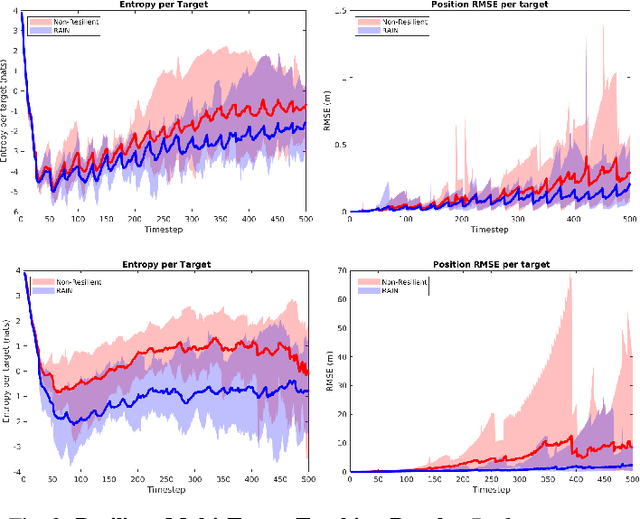
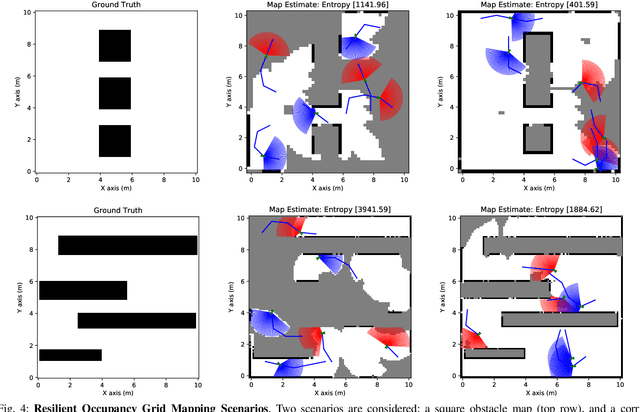
Emerging applications of collaborative autonomy, such as Multi-Target Tracking, Unknown Map Exploration, and Persistent Surveillance, require robots plan paths to navigate an environment while maximizing the information collected via on-board sensors. In this paper, we consider such information acquisition tasks but in adversarial environments, where attacks may temporarily disable the robots' sensors. We propose the first receding horizon algorithm, aiming for robust and adaptive multi-robot planning against any number of attacks, which we call Resilient Active Information acquisitioN (RAIN). RAIN calls, in an online fashion, a Robust Trajectory Planning (RTP) subroutine which plans attack-robust control inputs over a look-ahead planning horizon. We quantify RTP's performance by bounding its suboptimality. We base our theoretical analysis on notions of curvature introduced in combinatorial optimization. We evaluate RAIN in three information acquisition scenarios: Multi-Target Tracking, Occupancy Grid Mapping, and Persistent Surveillance. The scenarios are simulated in C++ and a Unity-based simulator. In all simulations, RAIN runs in real-time, and exhibits superior performance against a state-of-the-art baseline information acquisition algorithm, even in the presence of a high number of attacks. We also demonstrate RAIN's robustness and effectiveness against varying models of attacks (worst-case and random), as well as, varying replanning rates.