 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
FRANS: Automatic Feature Extraction for Time Series Forecasting
Sep 15, 2022
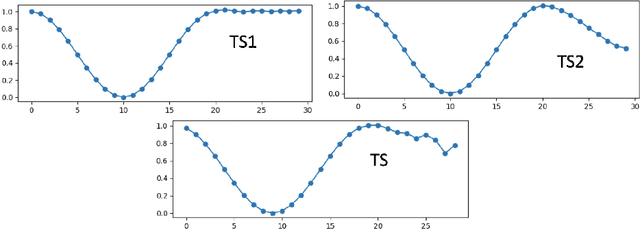
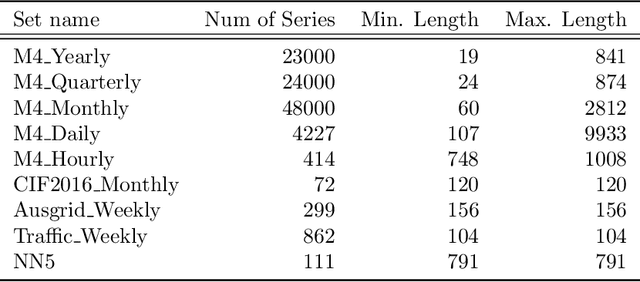
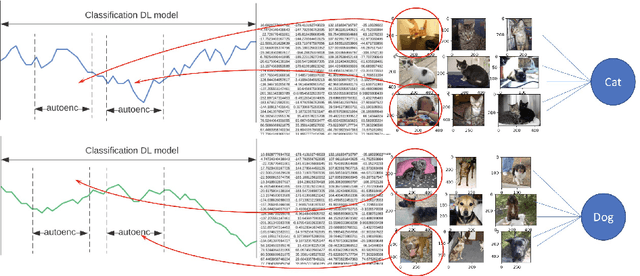
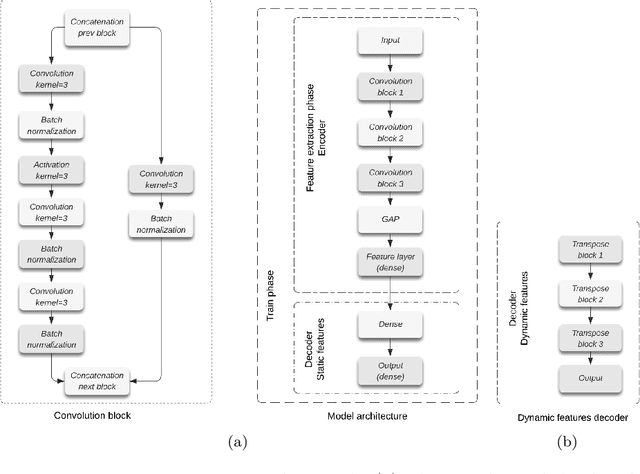
Feature extraction methods help in dimensionality reduction and capture relevant information. In time series forecasting (TSF), features can be used as auxiliary information to achieve better accuracy. Traditionally, features used in TSF are handcrafted, which requires domain knowledge and significant data-engineering work. In this research, we first introduce a notion of static and dynamic features, which then enables us to develop our autonomous Feature Retrieving Autoregressive Network for Static features (FRANS) that does not require domain knowledge. The method is based on a CNN classifier that is trained to create for each series a collective and unique class representation either from parts of the series or, if class labels are available, from a set of series of the same class. It allows to discriminate series with similar behaviour but from different classes and makes the features extracted from the classifier to be maximally discriminatory. We explore the interpretability of our features, and evaluate the prediction capabilities of the method within the forecasting meta-learning environment FFORMA. Our results show that our features lead to improvement in accuracy in most situations. Once trained our approach creates features orders of magnitude faster than statistical methods.
Predicting the Next Action by Modeling the Abstract Goal
Sep 12, 2022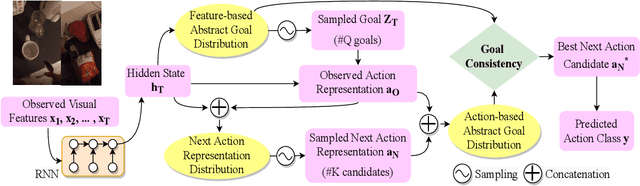
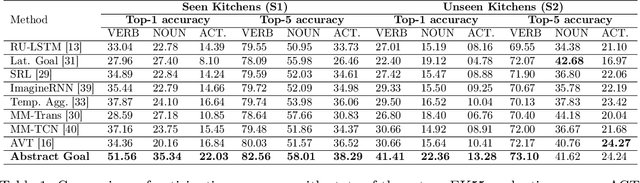
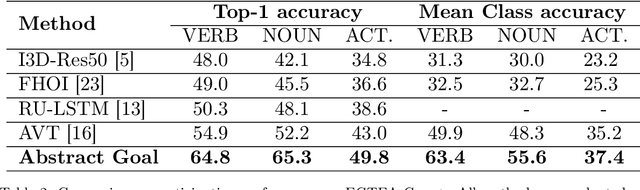
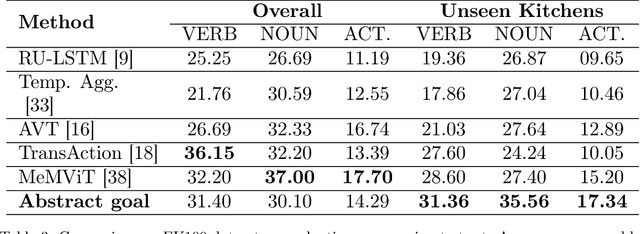
The problem of anticipating human actions is an inherently uncertain one. However, we can reduce this uncertainty if we have a sense of the goal that the actor is trying to achieve. Here, we present an action anticipation model that leverages goal information for the purpose of reducing the uncertainty in future predictions. Since we do not possess goal information or the observed actions during inference, we resort to visual representation to encapsulate information about both actions and goals. Through this, we derive a novel concept called abstract goal which is conditioned on observed sequences of visual features for action anticipation. We design the abstract goal as a distribution whose parameters are estimated using a variational recurrent network. We sample multiple candidates for the next action and introduce a goal consistency measure to determine the best candidate that follows from the abstract goal. Our method obtains impressive results on the very challenging Epic-Kitchens55 (EK55), EK100, and EGTEA Gaze+ datasets. We obtain absolute improvements of +13.69, +11.24, and +5.19 for Top-1 verb, Top-1 noun, and Top-1 action anticipation accuracy respectively over prior state-of-the-art methods for seen kitchens (S1) of EK55. Similarly, we also obtain significant improvements in the unseen kitchens (S2) set for Top-1 verb (+10.75), noun (+5.84) and action (+2.87) anticipation. Similar trend is observed for EGTEA Gaze+ dataset, where absolute improvement of +9.9, +13.1 and +6.8 is obtained for noun, verb, and action anticipation. It is through the submission of this paper that our method is currently the new state-of-the-art for action anticipation in EK55 and EGTEA Gaze+ https://competitions.codalab.org/competitions/20071#results Code available at https://github.com/debadityaroy/Abstract_Goal
Partial sequence labeling with structured Gaussian Processes
Sep 20, 2022
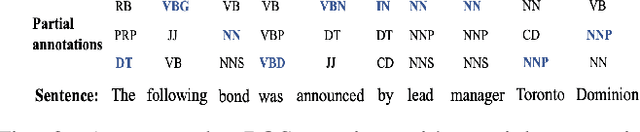
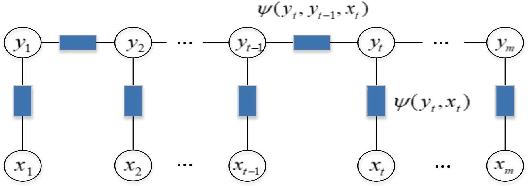
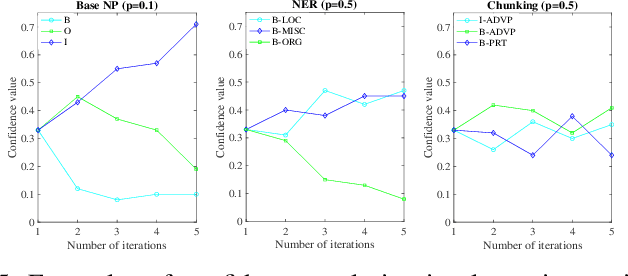
Existing partial sequence labeling models mainly focus on max-margin framework which fails to provide an uncertainty estimation of the prediction. Further, the unique ground truth disambiguation strategy employed by these models may include wrong label information for parameter learning. In this paper, we propose structured Gaussian Processes for partial sequence labeling (SGPPSL), which encodes uncertainty in the prediction and does not need extra effort for model selection and hyperparameter learning. The model employs factor-as-piece approximation that divides the linear-chain graph structure into the set of pieces, which preserves the basic Markov Random Field structure and effectively avoids handling large number of candidate output sequences generated by partially annotated data. Then confidence measure is introduced in the model to address different contributions of candidate labels, which enables the ground-truth label information to be utilized in parameter learning. Based on the derived lower bound of the variational lower bound of the proposed model, variational parameters and confidence measures are estimated in the framework of alternating optimization. Moreover, weighted Viterbi algorithm is proposed to incorporate confidence measure to sequence prediction, which considers label ambiguity arose from multiple annotations in the training data and thus helps improve the performance. SGPPSL is evaluated on several sequence labeling tasks and the experimental results show the effectiveness of the proposed model.
Deep Molecular Representation Learning via Fusing Physical and Chemical Information
Nov 28, 2021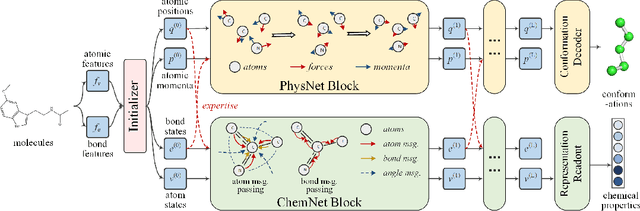
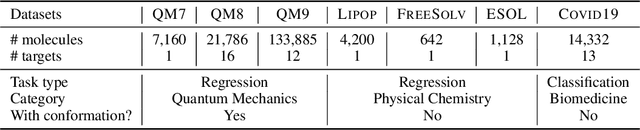
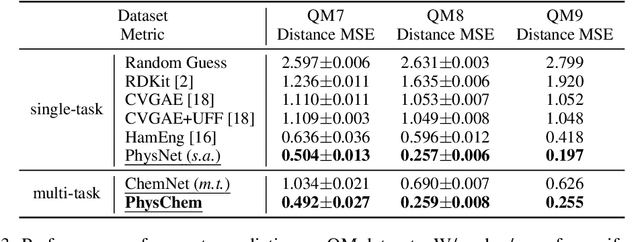
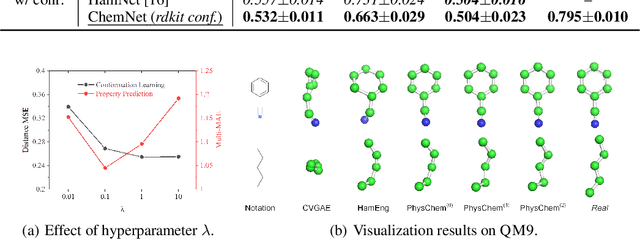
Molecular representation learning is the first yet vital step in combining deep learning and molecular science. To push the boundaries of molecular representation learning, we present PhysChem, a novel neural architecture that learns molecular representations via fusing physical and chemical information of molecules. PhysChem is composed of a physicist network (PhysNet) and a chemist network (ChemNet). PhysNet is a neural physical engine that learns molecular conformations through simulating molecular dynamics with parameterized forces; ChemNet implements geometry-aware deep message-passing to learn chemical / biomedical properties of molecules. Two networks specialize in their own tasks and cooperate by providing expertise to each other. By fusing physical and chemical information, PhysChem achieved state-of-the-art performances on MoleculeNet, a standard molecular machine learning benchmark. The effectiveness of PhysChem was further corroborated on cutting-edge datasets of SARS-CoV-2.
Self-improving Multiplane-to-layer Images for Novel View Synthesis
Oct 04, 2022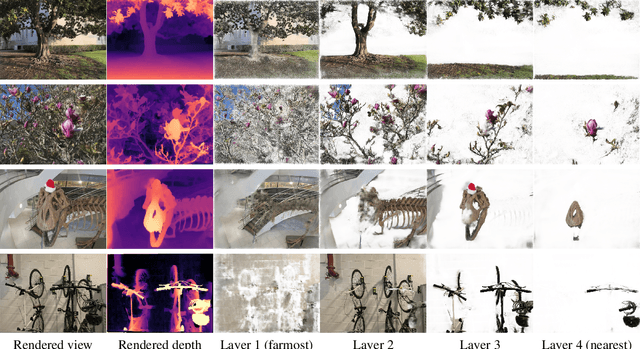
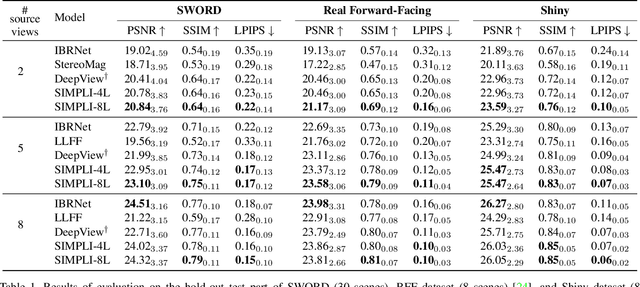
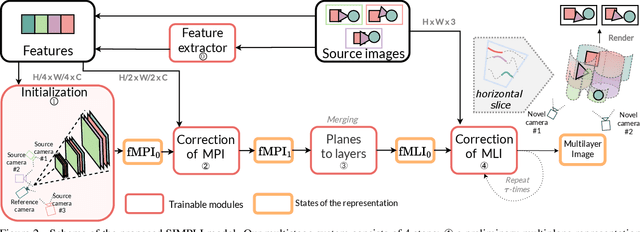
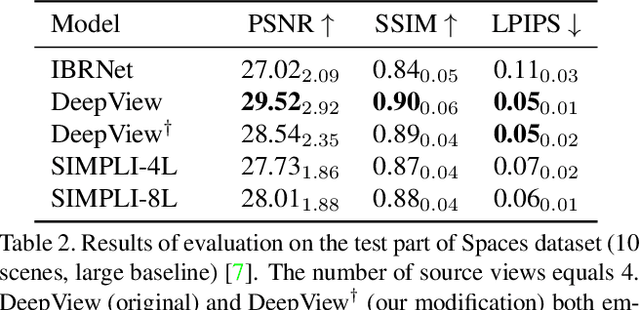
We present a new method for lightweight novel-view synthesis that generalizes to an arbitrary forward-facing scene. Recent approaches are computationally expensive, require per-scene optimization, or produce a memory-expensive representation. We start by representing the scene with a set of fronto-parallel semitransparent planes and afterward convert them to deformable layers in an end-to-end manner. Additionally, we employ a feed-forward refinement procedure that corrects the estimated representation by aggregating information from input views. Our method does not require fine-tuning when a new scene is processed and can handle an arbitrary number of views without restrictions. Experimental results show that our approach surpasses recent models in terms of common metrics and human evaluation, with the noticeable advantage in inference speed and compactness of the inferred layered geometry, see https://samsunglabs.github.io/MLI
Zeroth-Order Negative Curvature Finding: Escaping Saddle Points without Gradients
Oct 04, 2022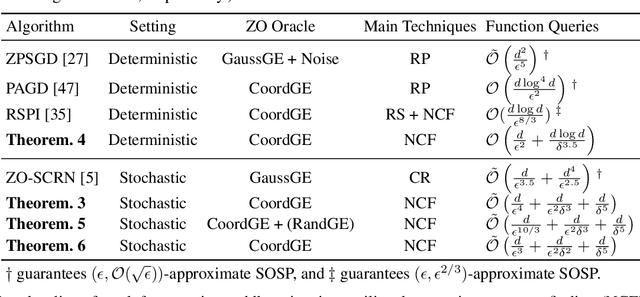
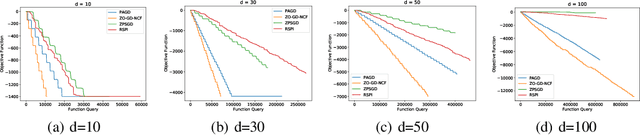
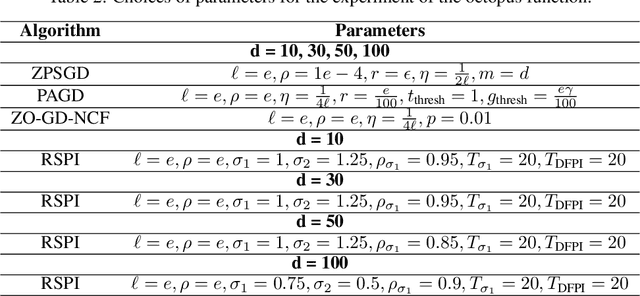
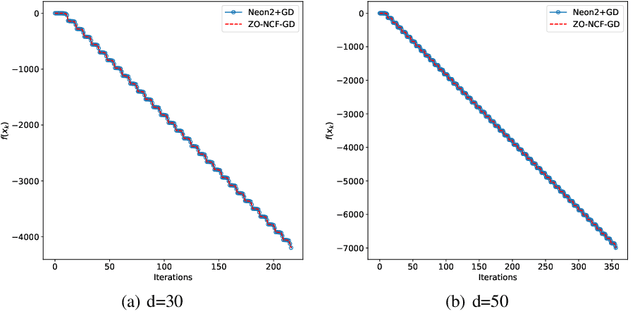
We consider escaping saddle points of nonconvex problems where only the function evaluations can be accessed. Although a variety of works have been proposed, the majority of them require either second or first-order information, and only a few of them have exploited zeroth-order methods, particularly the technique of negative curvature finding with zeroth-order methods which has been proven to be the most efficient method for escaping saddle points. To fill this gap, in this paper, we propose two zeroth-order negative curvature finding frameworks that can replace Hessian-vector product computations without increasing the iteration complexity. We apply the proposed frameworks to ZO-GD, ZO-SGD, ZO-SCSG, ZO-SPIDER and prove that these ZO algorithms can converge to $(\epsilon,\delta)$-approximate second-order stationary points with less query complexity compared with prior zeroth-order works for finding local minima.
SCAM! Transferring humans between images with Semantic Cross Attention Modulation
Oct 10, 2022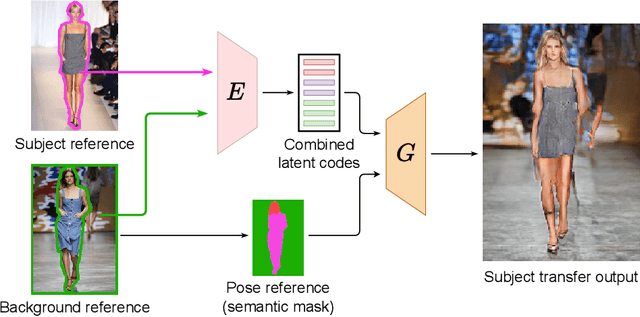

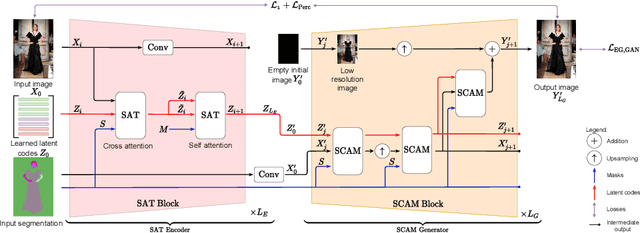
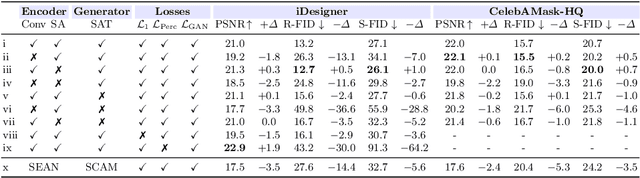
A large body of recent work targets semantically conditioned image generation. Most such methods focus on the narrower task of pose transfer and ignore the more challenging task of subject transfer that consists in not only transferring the pose but also the appearance and background. In this work, we introduce SCAM (Semantic Cross Attention Modulation), a system that encodes rich and diverse information in each semantic region of the image (including foreground and background), thus achieving precise generation with emphasis on fine details. This is enabled by the Semantic Attention Transformer Encoder that extracts multiple latent vectors for each semantic region, and the corresponding generator that exploits these multiple latents by using semantic cross attention modulation. It is trained only using a reconstruction setup, while subject transfer is performed at test time. Our analysis shows that our proposed architecture is successful at encoding the diversity of appearance in each semantic region. Extensive experiments on the iDesigner and CelebAMask-HD datasets show that SCAM outperforms SEAN and SPADE; moreover, it sets the new state of the art on subject transfer.
Quantification of Pollen Viability in Lantana camara By Digital Holographic Microscopy
Oct 10, 2022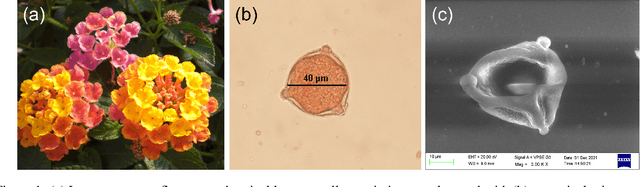

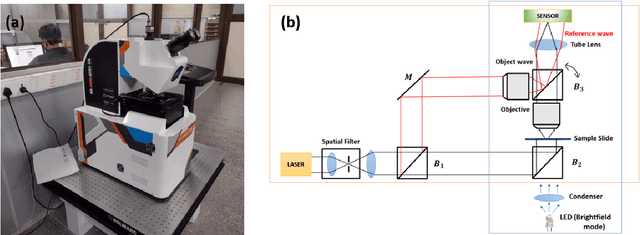
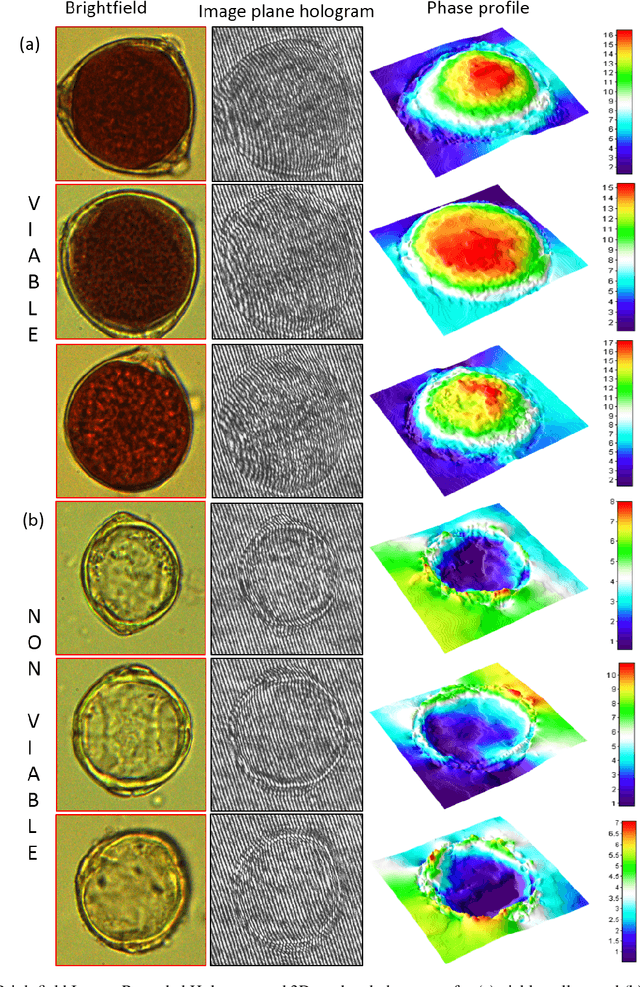
Pollen grains represent the male gametes of seed plants and their viability is critical for efficient sexual reproduction in the plant life cycle. Pollen analysis is used in diverse research thematics to address a range of botanical, ecological and geological questions. More recently it has been recognized that pollen may also be a vector for transgene escape from genetically modified crops, and the importance of pollen viability in invasion biology has also been emphasized. In this work, we analyse and report an efficient visual method for assessing the viability of pollen using digital holographic microscopy (DHM). We test this method on pollen grains of the invasive Lantana camara, a well known plant invader known to most of the tropical world. We image pollen grains and show that the quantitative phase information provided by the DHM technique can be readily related to the chromatin content of the individual cells and thereby to pollen viability. Our results offer a new technique for pollen viability assessment that does not require staining, and can be applied to a number of emerging areas in plant science.
Semi-supervised Semantic Segmentation with Prototype-based Consistency Regularization
Oct 10, 2022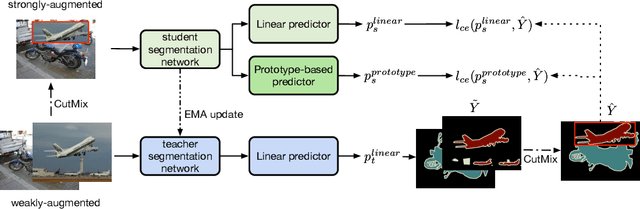
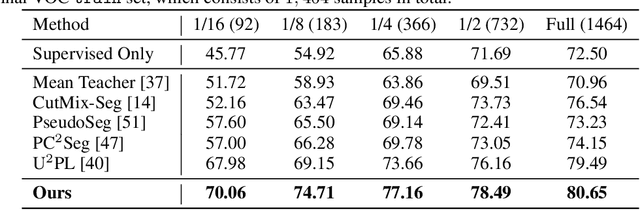
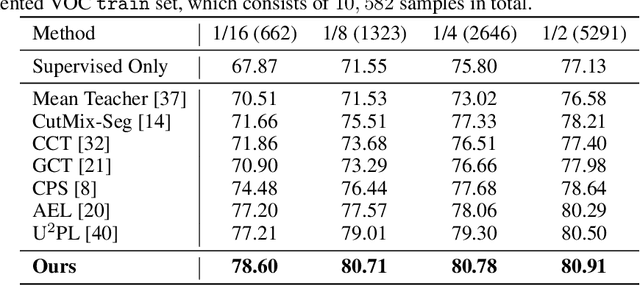
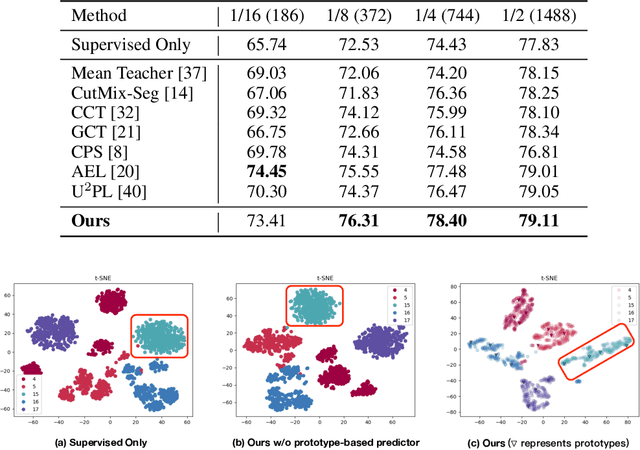
Semi-supervised semantic segmentation requires the model to effectively propagate the label information from limited annotated images to unlabeled ones. A challenge for such a per-pixel prediction task is the large intra-class variation, i.e., regions belonging to the same class may exhibit a very different appearance even in the same picture. This diversity will make the label propagation hard from pixels to pixels. To address this problem, we propose a novel approach to regularize the distribution of within-class features to ease label propagation difficulty. Specifically, our approach encourages the consistency between the prediction from a linear predictor and the output from a prototype-based predictor, which implicitly encourages features from the same pseudo-class to be close to at least one within-class prototype while staying far from the other between-class prototypes. By further incorporating CutMix operations and a carefully-designed prototype maintenance strategy, we create a semi-supervised semantic segmentation algorithm that demonstrates superior performance over the state-of-the-art methods from extensive experimental evaluation on both Pascal VOC and Cityscapes benchmarks.
Over-the-Air Gaussian Process Regression Based on Product of Experts
Oct 05, 2022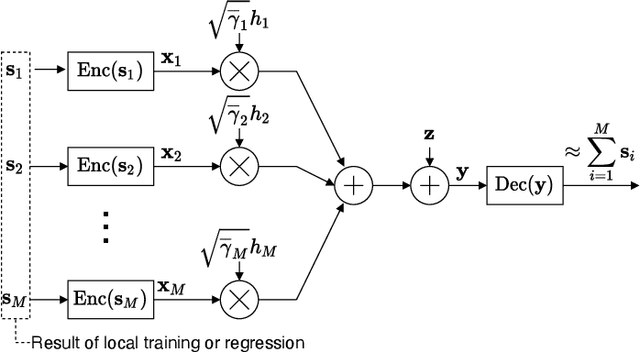
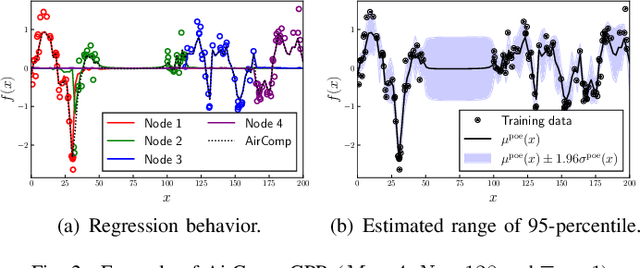
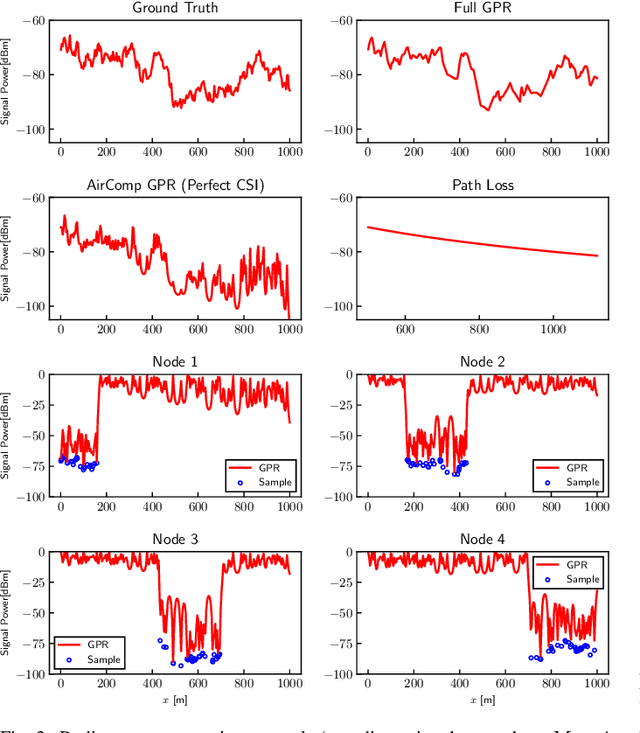
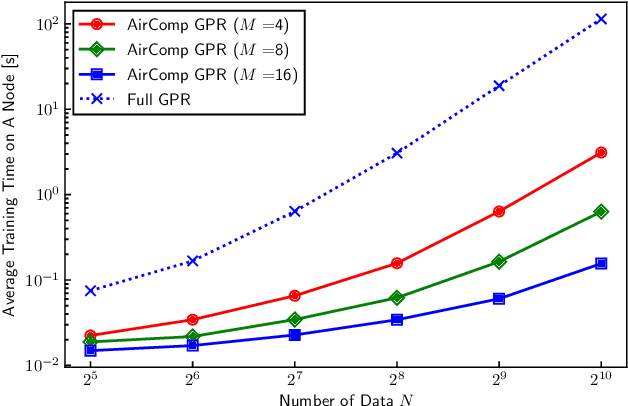
This paper proposes a distributed Gaussian process regression (GPR) with over-the-air computation, termed AirComp GPR, for communication- and computation-efficient data analysis over wireless networks. GPR is a non-parametric regression method that can model the target flexibly. However, its computational complexity and communication efficiency tend to be significant as the number of data increases. AirComp GPR focuses on that product-of-experts-based GPR approximates the exact GPR by a sum of values reported from distributed nodes. We introduce AirComp for the training and prediction steps to allow the nodes to transmit their local computation results simultaneously; the communication strategies are presented, including distributed training based on perfect and statistical channel state information cases. Applying to a radio map construction task, we demonstrate that AirComp GPR speeds up the computation time while maintaining the communication cost in training constant regardless of the numbers of data and nodes.