 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
End-to-end Transformer for Compressed Video Quality Enhancement
Oct 25, 2022
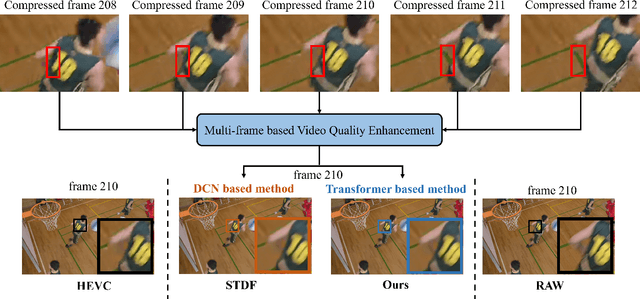
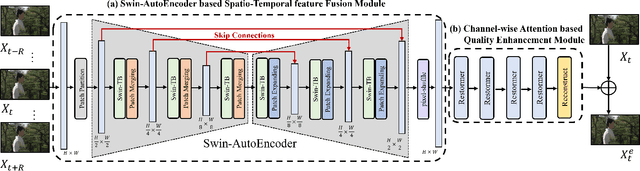
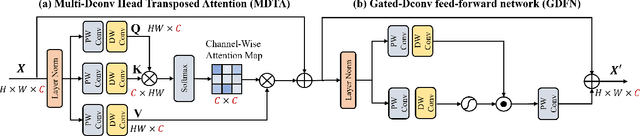
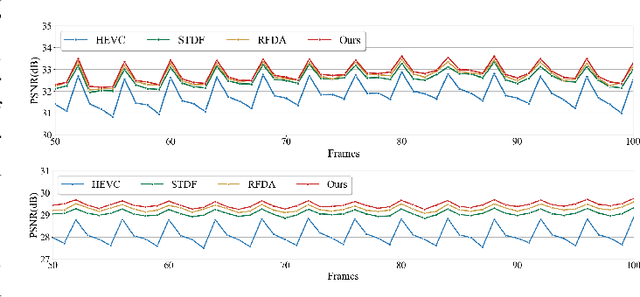
Convolutional neural networks have achieved excellent results in compressed video quality enhancement task in recent years. State-of-the-art methods explore the spatiotemporal information of adjacent frames mainly by deformable convolution. However, offset fields in deformable convolution are difficult to train, and its instability in training often leads to offset overflow, which reduce the efficiency of correlation modeling. In this work, we propose a transformer-based compressed video quality enhancement (TVQE) method, consisting of Swin-AutoEncoder based Spatio-Temporal feature Fusion (SSTF) module and Channel-wise Attention based Quality Enhancement (CAQE) module. The proposed SSTF module learns both local and global features with the help of Swin-AutoEncoder, which improves the ability of correlation modeling. Meanwhile, the window mechanism-based Swin Transformer and the encoderdecoder structure greatly improve the execution efficiency. On the other hand, the proposed CAQE module calculates the channel attention, which aggregates the temporal information between channels in the feature map, and finally achieves the efficient fusion of inter-frame information. Extensive experimental results on the JCT-VT test sequences show that the proposed method achieves better performance in average for both subjective and objective quality. Meanwhile, our proposed method outperforms existing ones in terms of both inference speed and GPU consumption.
DeXtreme: Transfer of Agile In-hand Manipulation from Simulation to Reality
Oct 25, 2022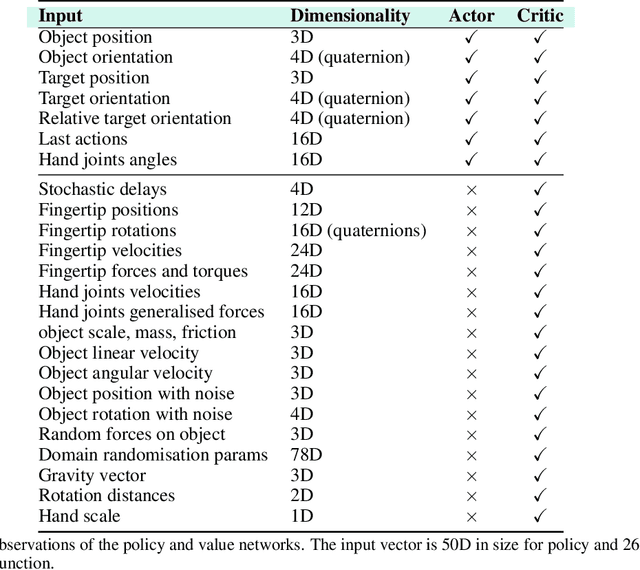
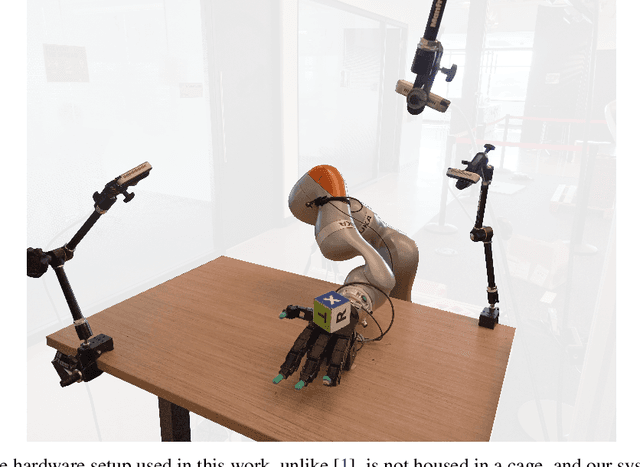
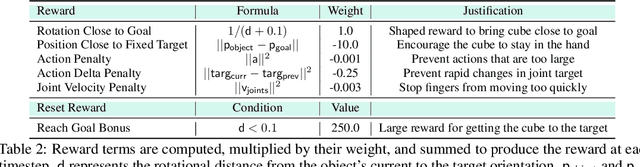
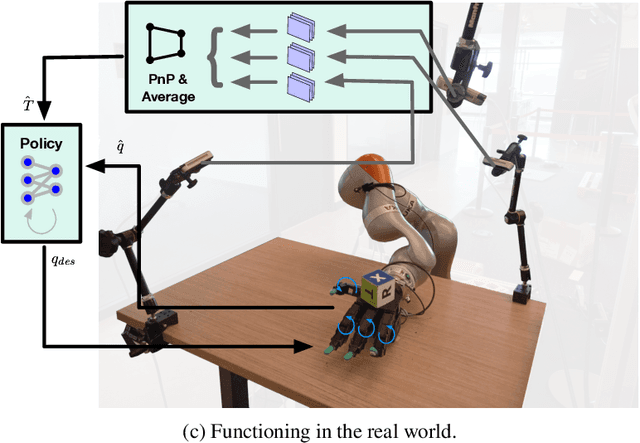
Recent work has demonstrated the ability of deep reinforcement learning (RL) algorithms to learn complex robotic behaviours in simulation, including in the domain of multi-fingered manipulation. However, such models can be challenging to transfer to the real world due to the gap between simulation and reality. In this paper, we present our techniques to train a) a policy that can perform robust dexterous manipulation on an anthropomorphic robot hand and b) a robust pose estimator suitable for providing reliable real-time information on the state of the object being manipulated. Our policies are trained to adapt to a wide range of conditions in simulation. Consequently, our vision-based policies significantly outperform the best vision policies in the literature on the same reorientation task and are competitive with policies that are given privileged state information via motion capture systems. Our work reaffirms the possibilities of sim-to-real transfer for dexterous manipulation in diverse kinds of hardware and simulator setups, and in our case, with the Allegro Hand and Isaac Gym GPU-based simulation. Furthermore, it opens up possibilities for researchers to achieve such results with commonly-available, affordable robot hands and cameras. Videos of the resulting policy and supplementary information, including experiments and demos, can be found at \url{https://dextreme.org/}
ASD: Towards Attribute Spatial Decomposition for Prior-Free Facial Attribute Recognition
Oct 25, 2022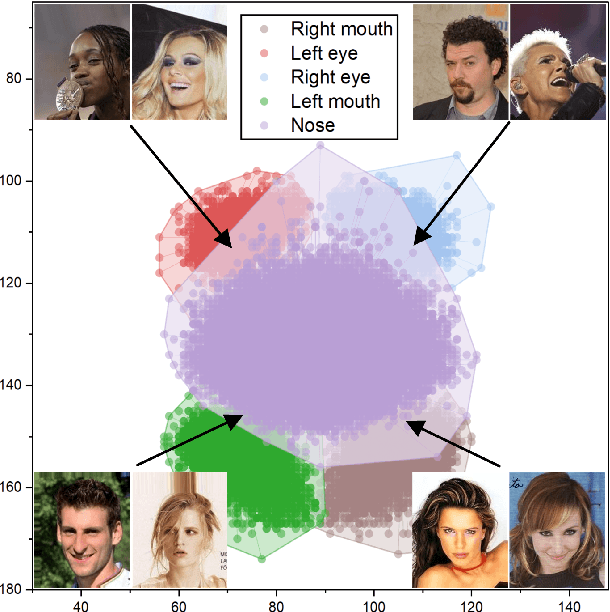
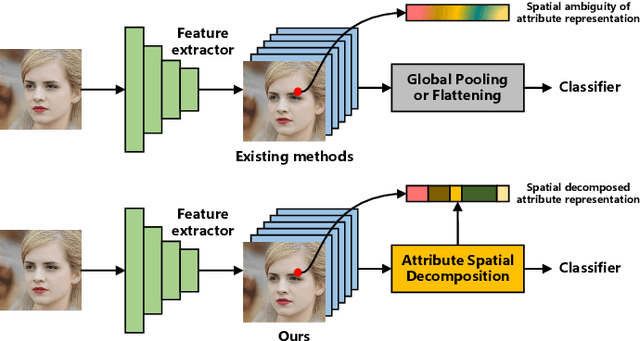
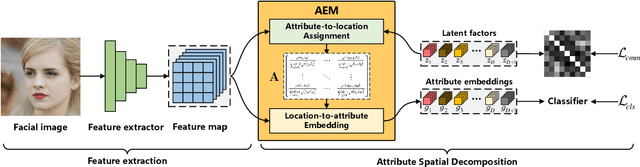
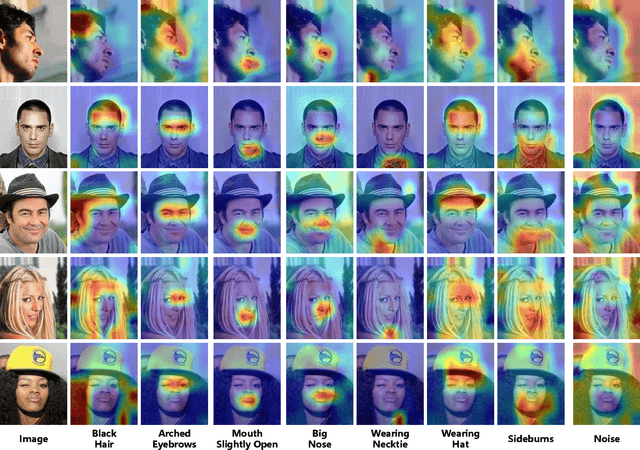
Representing the spatial properties of facial attributes is a vital challenge for facial attribute recognition (FAR). Recent advances have achieved the reliable performances for FAR, benefiting from the description of spatial properties via extra prior information. However, the extra prior information might not be always available, resulting in the restricted application scenario of the prior-based methods. Meanwhile, the spatial ambiguity of facial attributes caused by inherent spatial diversities of facial parts is ignored. To address these issues, we propose a prior-free method for attribute spatial decomposition (ASD), mitigating the spatial ambiguity of facial attributes without any extra prior information. Specifically, assignment-embedding module (AEM) is proposed to enable the procedure of ASD, which consists of two operations: attribute-to-location assignment and location-to-attribute embedding. The attribute-to-location assignment first decomposes the feature map based on latent factors, assigning the magnitude of attribute components on each spatial location. Then, the assigned attribute components from all locations to represent the global-level attribute embeddings. Furthermore, correlation matrix minimization (CMM) is introduced to enlarge the discriminability of attribute embeddings. Experimental results demonstrate the superiority of ASD compared with state-of-the-art prior-based methods, while the reliable performance of ASD for the case of limited training data is further validated.
Dynamic and Distributed Optimization for the Allocation of Aerial Swarm Vehicles
Nov 30, 2022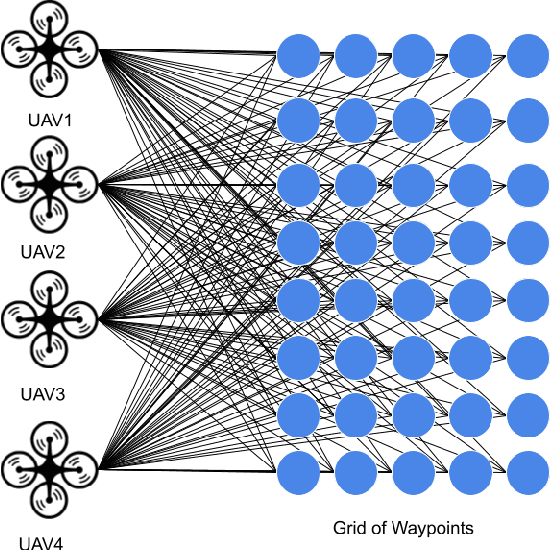
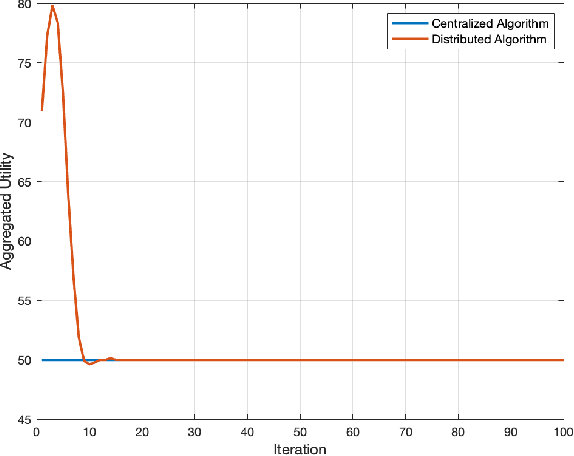
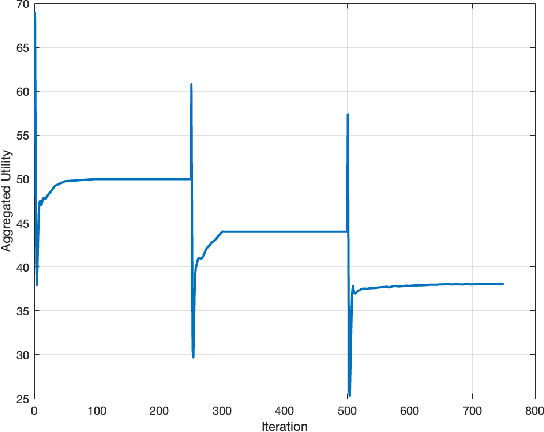
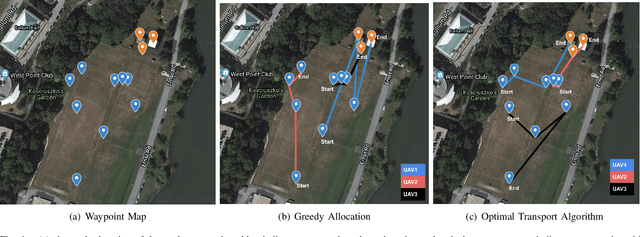
Optimal transport (OT) is a framework that can guide the design of efficient resource allocation strategies in a network of multiple sources and targets. This paper applies discrete OT to a swarm of UAVs in a novel way to achieve appropriate task allocation and execution. Drone swarm deployments already operate in multiple domains where sensors are used to gain knowledge of an environment [1]. Use cases such as, chemical and radiation detection, and thermal and RGB imaging create a specific need for an algorithm that considers parameters on both the UAV and waypoint side and allows for updating the matching scheme as the swarm gains information from the environment. Additionally, the need for a centralized planner can be removed by using a distributed algorithm that can dynamically update based on changes in the swarm network or parameters. To this end, we develop a dynamic and distributed OT algorithm that matches a UAV to the optimal waypoint based on one parameter at the UAV and another parameter at the waypoint. We show the convergence and allocation of the algorithm through a case study and test the algorithm's effectiveness against a greedy assignment algorithm in simulation.
Random Copolymer inverse design system orienting on Accurate discovering of Antimicrobial peptide-mimetic copolymers
Nov 30, 2022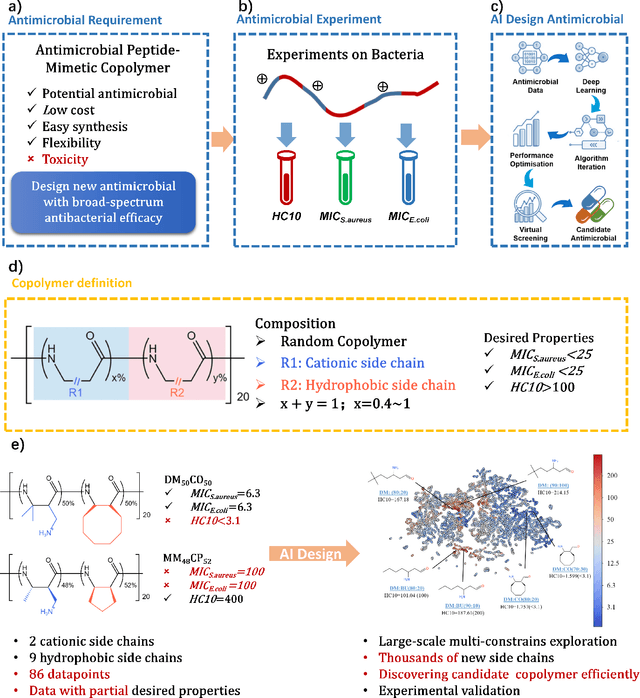
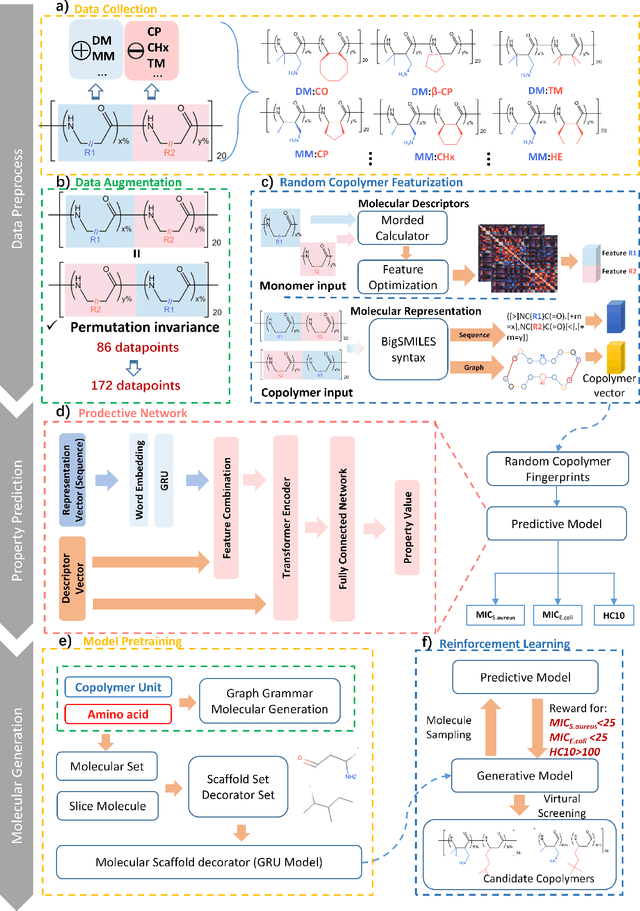
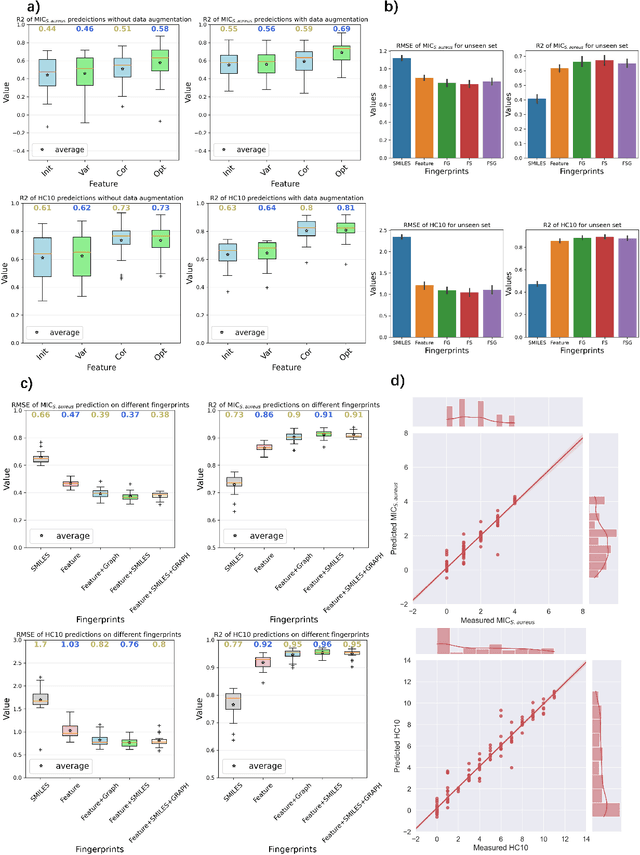
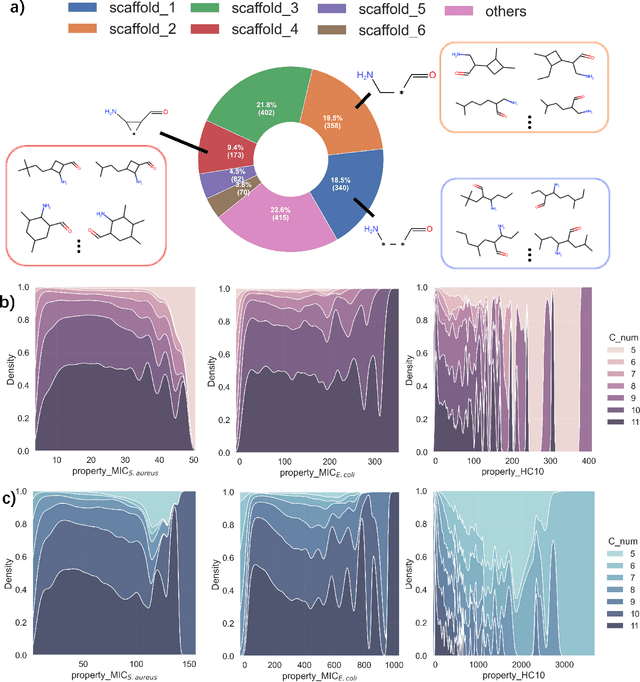
Antimicrobial resistance is one of the biggest health problem, especially in the current period of COVID-19 pandemic. Due to the unique membrane-destruction bactericidal mechanism, antimicrobial peptide-mimetic copolymers are paid more attention and it is urgent to find more potential candidates with broad-spectrum antibacterial efficacy and low toxicity. Artificial intelligence has shown significant performance on small molecule or biotech drugs, however, the higher-dimension of polymer space and the limited experimental data restrict the application of existing methods on copolymer design. Herein, we develop a universal random copolymer inverse design system via multi-model copolymer representation learning, knowledge distillation and reinforcement learning. Our system realize a high-precision antimicrobial activity prediction with few-shot data by extracting various chemical information from multi-modal copolymer representations. By pre-training a scaffold-decorator generative model via knowledge distillation, copolymer space are greatly contracted to the near space of existing data for exploration. Thus, our reinforcement learning algorithm can be adaptive for customized generation on specific scaffolds and requirements on property or structures. We apply our system on collected antimicrobial peptide-mimetic copolymers data, and we discover candidate copolymers with desired properties.
DiffusionBERT: Improving Generative Masked Language Models with Diffusion Models
Nov 30, 2022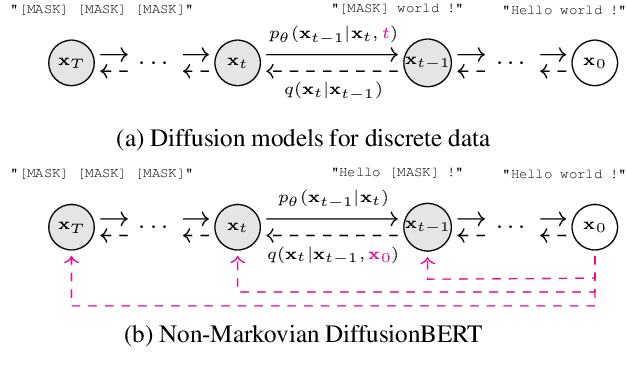
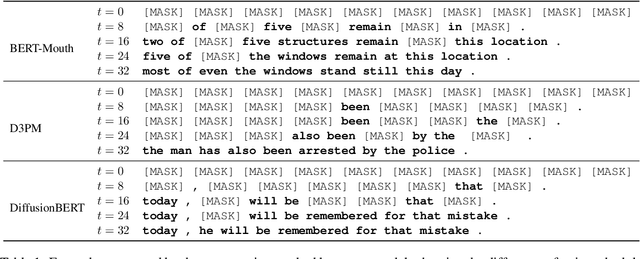
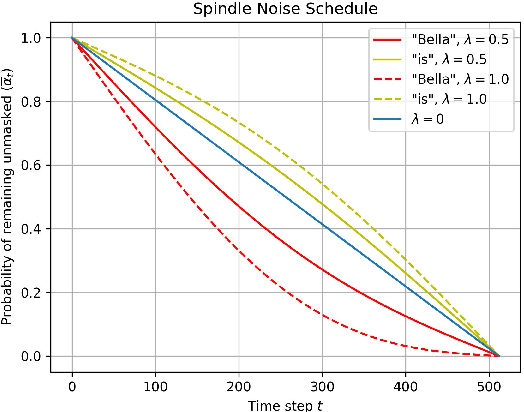
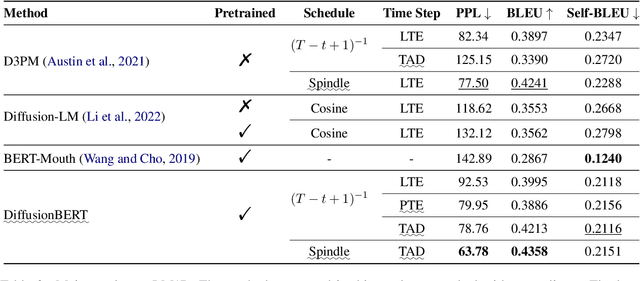
We present DiffusionBERT, a new generative masked language model based on discrete diffusion models. Diffusion models and many pre-trained language models have a shared training objective, i.e., denoising, making it possible to combine the two powerful models and enjoy the best of both worlds. On the one hand, diffusion models offer a promising training strategy that helps improve the generation quality. On the other hand, pre-trained denoising language models (e.g., BERT) can be used as a good initialization that accelerates convergence. We explore training BERT to learn the reverse process of a discrete diffusion process with an absorbing state and elucidate several designs to improve it. First, we propose a new noise schedule for the forward diffusion process that controls the degree of noise added at each step based on the information of each token. Second, we investigate several designs of incorporating the time step into BERT. Experiments on unconditional text generation demonstrate that DiffusionBERT achieves significant improvement over existing diffusion models for text (e.g., D3PM and Diffusion-LM) and previous generative masked language models in terms of perplexity and BLEU score.
Rendezvous in Time: An Attention-based Temporal Fusion approach for Surgical Triplet Recognition
Nov 30, 2022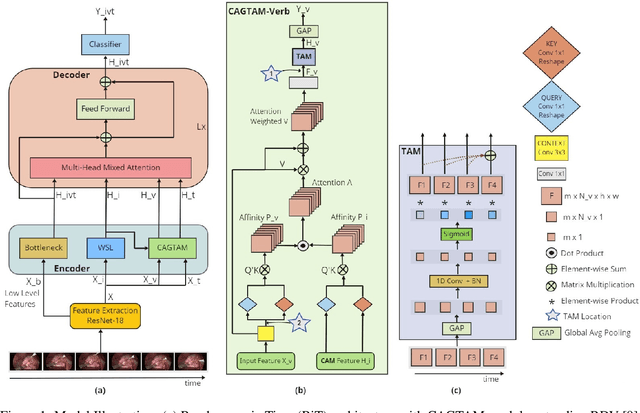

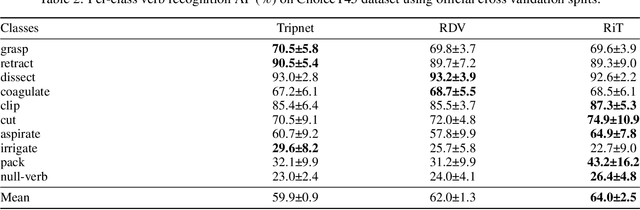
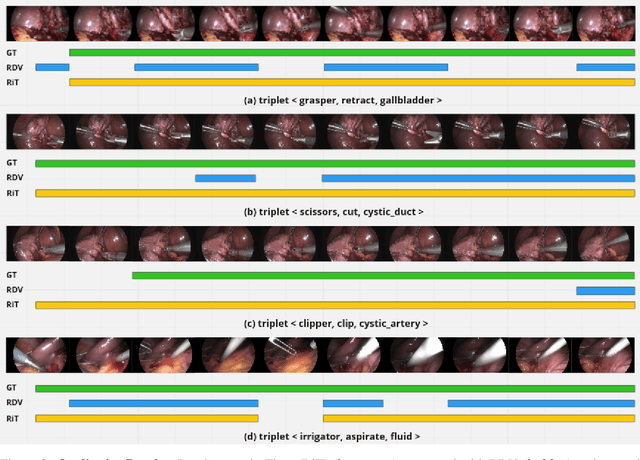
One of the recent advances in surgical AI is the recognition of surgical activities as triplets of (instrument, verb, target). Albeit providing detailed information for computer-assisted intervention, current triplet recognition approaches rely only on single frame features. Exploiting the temporal cues from earlier frames would improve the recognition of surgical action triplets from videos. In this paper, we propose Rendezvous in Time (RiT) - a deep learning model that extends the state-of-the-art model, Rendezvous, with temporal modeling. Focusing more on the verbs, our RiT explores the connectedness of current and past frames to learn temporal attention-based features for enhanced triplet recognition. We validate our proposal on the challenging surgical triplet dataset, CholecT45, demonstrating an improved recognition of the verb and triplet along with other interactions involving the verb such as (instrument, verb). Qualitative results show that the RiT produces smoother predictions for most triplet instances than the state-of-the-arts. We present a novel attention-based approach that leverages the temporal fusion of video frames to model the evolution of surgical actions and exploit their benefits for surgical triplet recognition.
A data set providing synthetic and real-world fisheye video sequences
Nov 30, 2022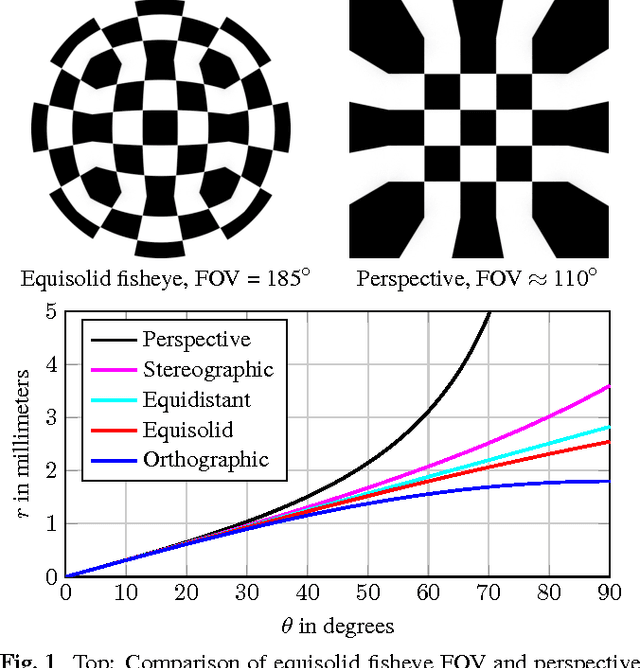
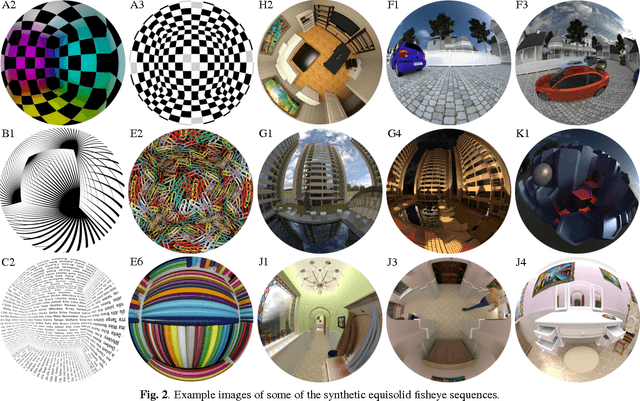
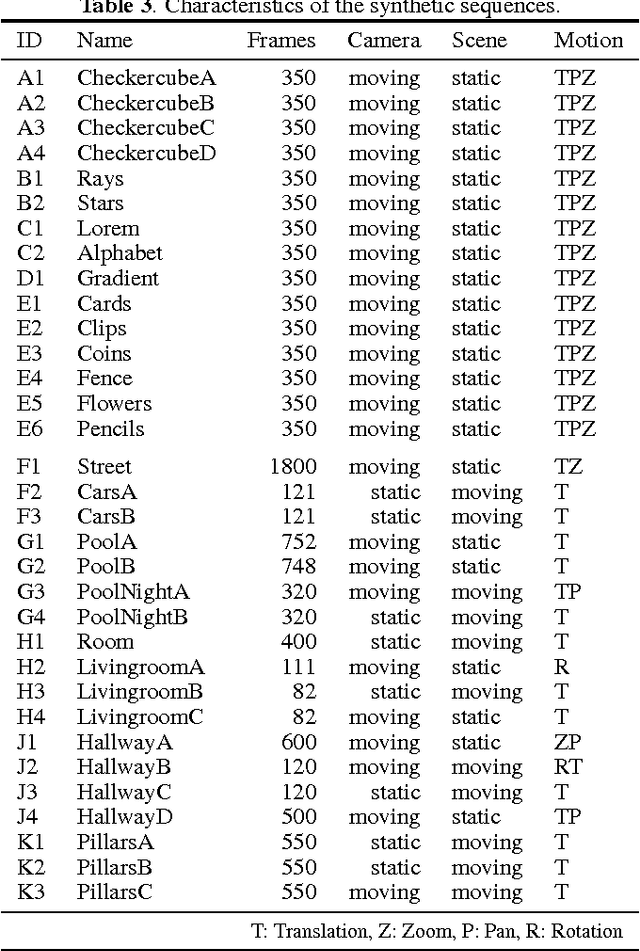
In video surveillance as well as automotive applications, so-called fisheye cameras are often employed to capture a very wide angle of view. As such cameras depend on projections quite different from the classical perspective projection, the resulting fisheye image and video data correspondingly exhibits non-rectilinear image characteristics. Typical image and video processing algorithms, however, are not designed for these fisheye characteristics. To be able to develop and evaluate algorithms specifically adapted to fisheye images and videos, a corresponding test data set is therefore introduced in this paper. The first of those sequences were generated during the authors' own work on motion estimation for fish-eye videos and further sequences have gradually been added to create a more extensive collection. The data set now comprises synthetically generated fisheye sequences, ranging from simple patterns to more complex scenes, as well as fisheye video sequences captured with an actual fisheye camera. For the synthetic sequences, exact information on the lens employed is available, thus facilitating both verification and evaluation of any adapted algorithms. For the real-world sequences, we provide calibration data as well as the settings used during acquisition. The sequences are freely available via www.lms.lnt.de/fisheyedataset/.
Self-Supervised Feature Learning for Long-Term Metric Visual Localization
Nov 30, 2022
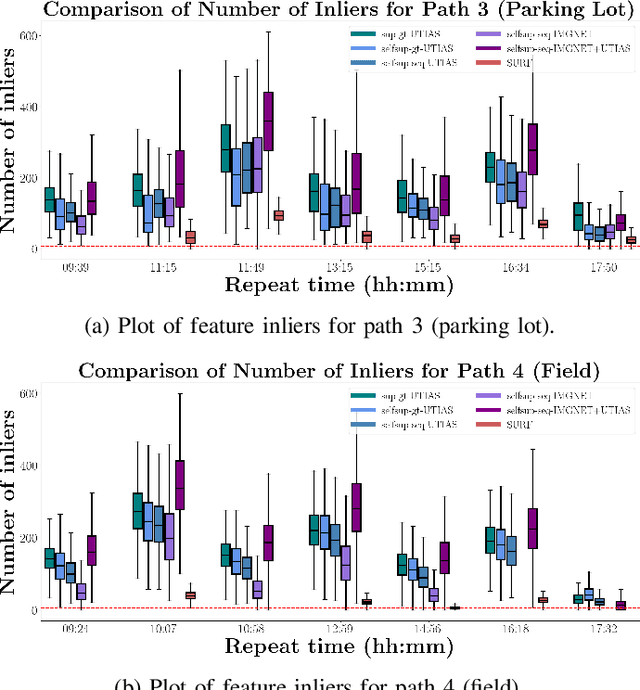
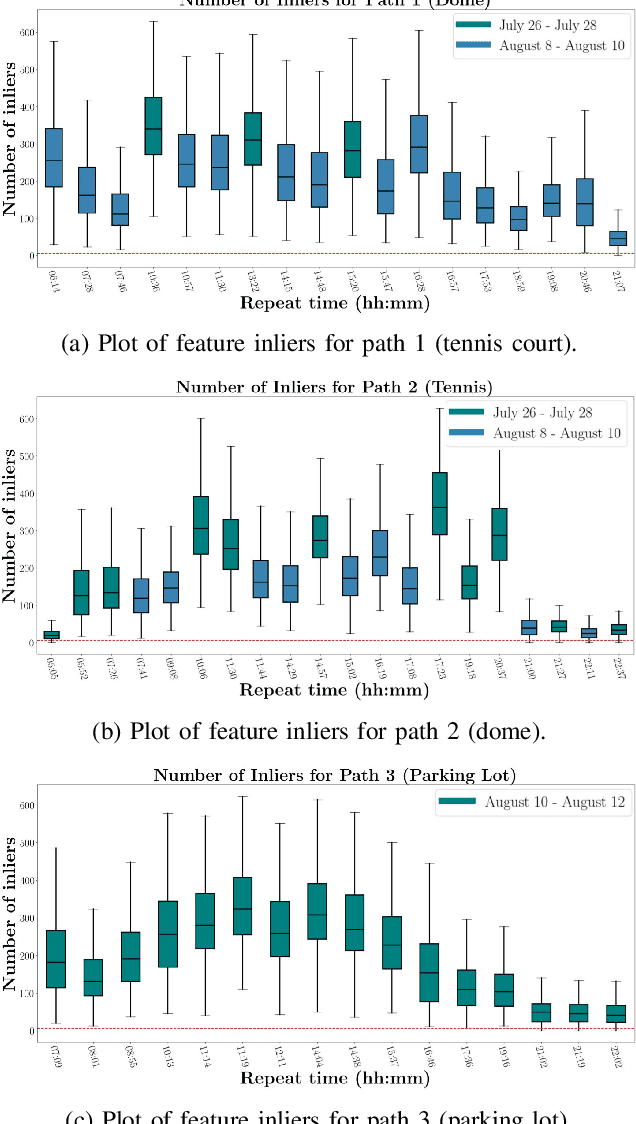
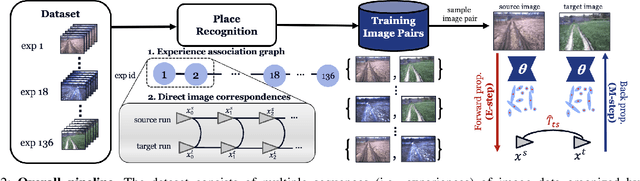
Visual localization is the task of estimating camera pose in a known scene, which is an essential problem in robotics and computer vision. However, long-term visual localization is still a challenge due to the environmental appearance changes caused by lighting and seasons. While techniques exist to address appearance changes using neural networks, these methods typically require ground-truth pose information to generate accurate image correspondences or act as a supervisory signal during training. In this paper, we present a novel self-supervised feature learning framework for metric visual localization. We use a sequence-based image matching algorithm across different sequences of images (i.e., experiences) to generate image correspondences without ground-truth labels. We can then sample image pairs to train a deep neural network that learns sparse features with associated descriptors and scores without ground-truth pose supervision. The learned features can be used together with a classical pose estimator for visual stereo localization. We validate the learned features by integrating with an existing Visual Teach & Repeat pipeline to perform closed-loop localization experiments under different lighting conditions for a total of 22.4 km.
Incremental Fourier Neural Operator
Nov 30, 2022
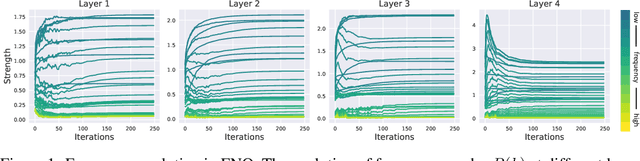

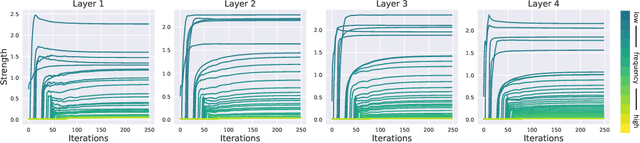
Recently, neural networks have proven their impressive ability to solve partial differential equations (PDEs). Among them, Fourier neural operator (FNO) has shown success in learning solution operators for highly non-linear problems such as turbulence flow. FNO is discretization-invariant, where it can be trained on low-resolution data and generalizes to problems with high-resolution. This property is related to the low-pass filters in FNO, where only a limited number of frequency modes are selected to propagate information. However, it is still a challenge to select an appropriate number of frequency modes and training resolution for different PDEs. Too few frequency modes and low-resolution data hurt generalization, while too many frequency modes and high-resolution data are computationally expensive and lead to over-fitting. To this end, we propose Incremental Fourier Neural Operator (IFNO), which augments both the frequency modes and data resolution incrementally during training. We show that IFNO achieves better generalization (around 15% reduction on testing L2 loss) while reducing the computational cost by 35%, compared to the standard FNO. In addition, we observe that IFNO follows the behavior of implicit regularization in FNO, which explains its excellent generalization ability.