 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
ROIFormer: Semantic-Aware Region of Interest Transformer for Efficient Self-Supervised Monocular Depth Estimation
Dec 16, 2022
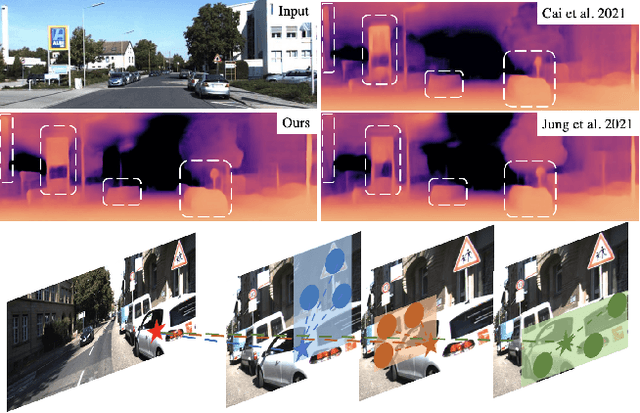
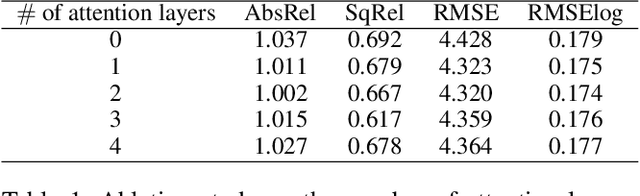
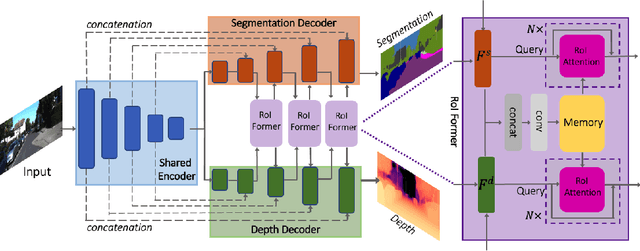
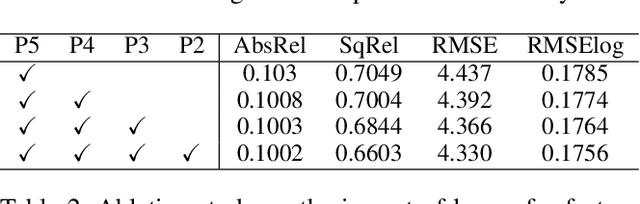
The exploration of mutual-benefit cross-domains has shown great potential toward accurate self-supervised depth estimation. In this work, we revisit feature fusion between depth and semantic information and propose an efficient local adaptive attention method for geometric aware representation enhancement. Instead of building global connections or deforming attention across the feature space without restraint, we bound the spatial interaction within a learnable region of interest. In particular, we leverage geometric cues from semantic information to learn local adaptive bounding boxes to guide unsupervised feature aggregation. The local areas preclude most irrelevant reference points from attention space, yielding more selective feature learning and faster convergence. We naturally extend the paradigm into a multi-head and hierarchic way to enable the information distillation in different semantic levels and improve the feature discriminative ability for fine-grained depth estimation. Extensive experiments on the KITTI dataset show that our proposed method establishes a new state-of-the-art in self-supervised monocular depth estimation task, demonstrating the effectiveness of our approach over former Transformer variants.
Edge-Assisted V2X Motion Planning and Power Control Under Channel Uncertainty
Dec 13, 2022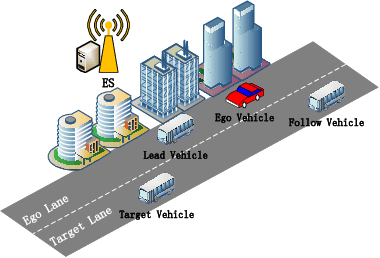
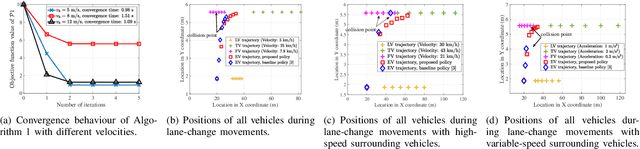
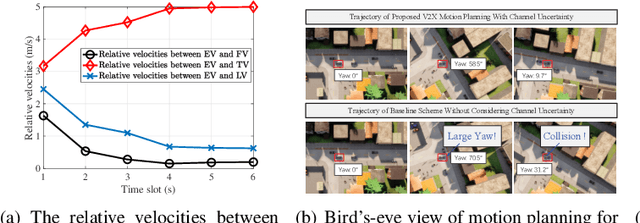
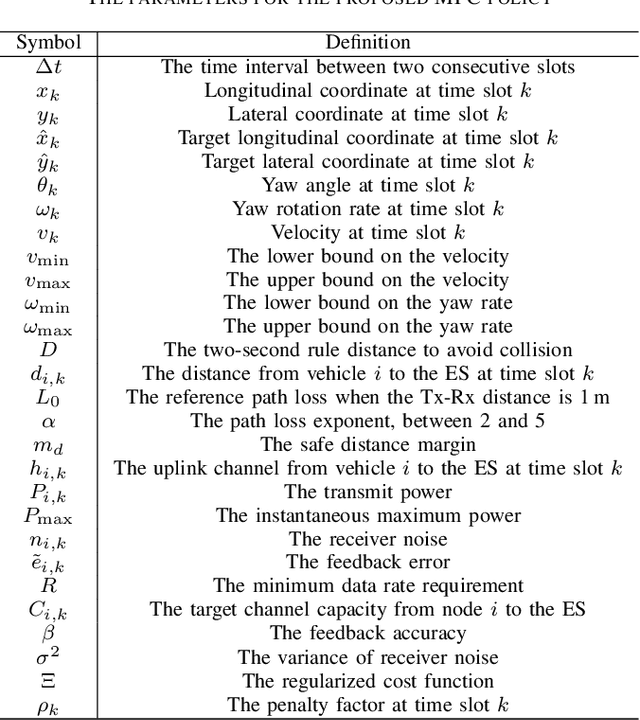
Edge-assisted vehicle-to-everything (V2X) motion planning is an emerging paradigm to achieve safe and efficient autonomous driving, since it leverages the global position information shared among multiple vehicles. However, due to the imperfect channel state information (CSI), the position information of vehicles may become outdated and inaccurate. Conventional methods ignoring the communication delays could severely jeopardize driving safety. To fill this gap, this paper proposes a robust V2X motion planning policy that adapts between competitive driving under a low communication delay and conservative driving under a high communication delay, and guarantees small communication delays at key waypoints via power control. This is achieved by integrating the vehicle mobility and communication delay models and solving a joint design of motion planning and power control problem via the block coordinate descent framework. Simulation results show that the proposed driving policy achieves the smallest collision ratio compared with other benchmark policies.
Fully Complex-valued Fully Convolutional Multi-feature Fusion Network (FC2MFN) for Building Segmentation of InSAR images
Dec 14, 2022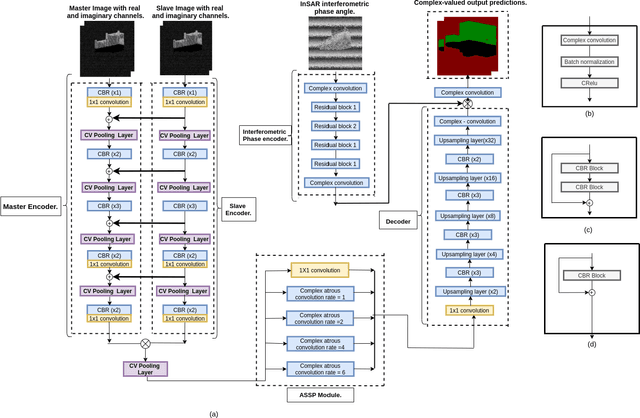
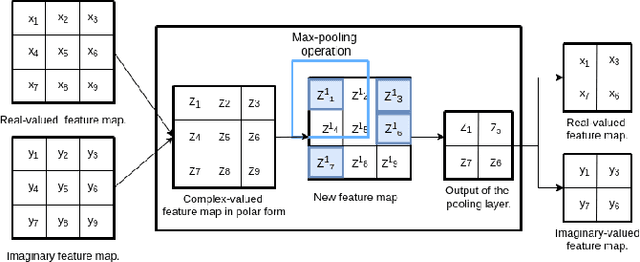
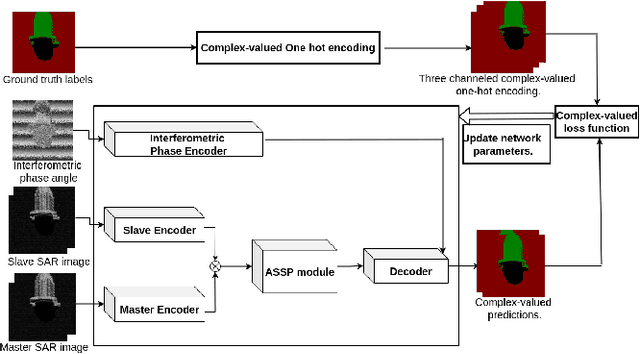
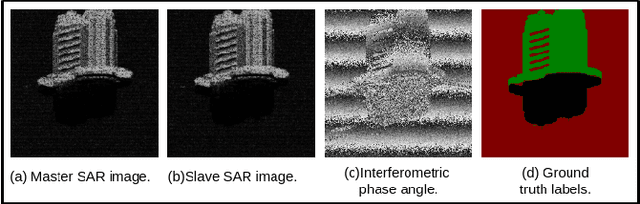
Building segmentation in high-resolution InSAR images is a challenging task that can be useful for large-scale surveillance. Although complex-valued deep learning networks perform better than their real-valued counterparts for complex-valued SAR data, phase information is not retained throughout the network, which causes a loss of information. This paper proposes a Fully Complex-valued, Fully Convolutional Multi-feature Fusion Network(FC2MFN) for building semantic segmentation on InSAR images using a novel, fully complex-valued learning scheme. The network learns multi-scale features, performs multi-feature fusion, and has a complex-valued output. For the particularity of complex-valued InSAR data, a new complex-valued pooling layer is proposed that compares complex numbers considering their magnitude and phase. This helps the network retain the phase information even through the pooling layer. Experimental results on the simulated InSAR dataset show that FC2MFN achieves better results compared to other state-of-the-art methods in terms of segmentation performance and model complexity.
SPTS v2: Single-Point Scene Text Spotting
Jan 04, 2023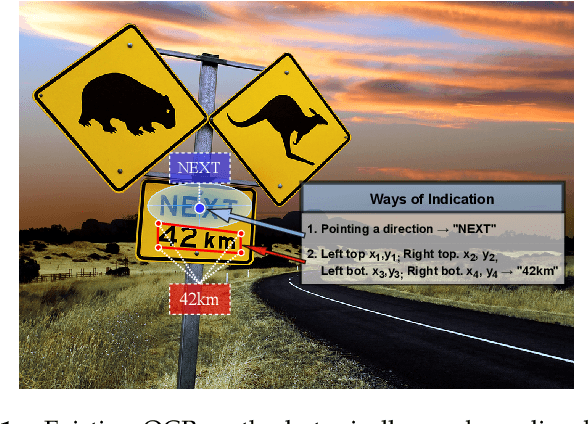
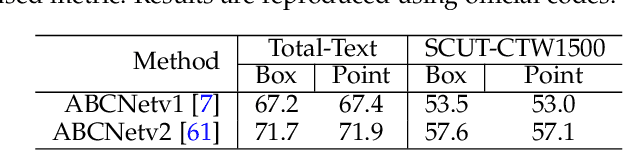
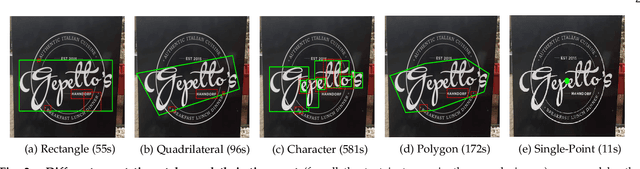
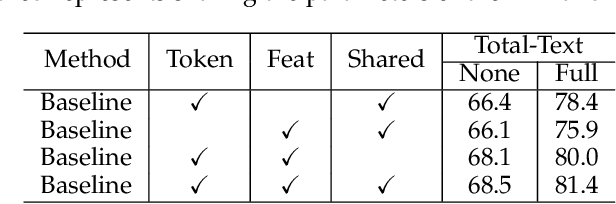
End-to-end scene text spotting has made significant progress due to its intrinsic synergy between text detection and recognition. Previous methods commonly regard manual annotations such as horizontal rectangles, rotated rectangles, quadrangles,and polygons as a prerequisite, which are much more expensive than using single-point. For the first time, we demonstrate that training scene text spotting models can be achieved with an extremely low-cost single-point annotation by the proposed framework, termed SPTS v2. SPTS v2 reserves the advantage of the auto-regressive Transformer with an Instance Assignment Decoder (IAD) through sequentially predicting the center points of all text instances inside the same predicting sequence, while with a Parallel Recognition Decoder (PRD) for text recognition in parallel. These two decoders share the same parameters and are interactively connected with a simple but effective information transmission process to pass the gradient and information. Comprehensive experiments on various existing benchmark datasets demonstrate the SPTS v2 can outperform previous state-of-the-art single-point text spotters with fewer parameters while achieving 14x faster inference speed. Most importantly, within the scope of our SPTS v2, extensive experiments further reveal an important phenomenon that single-point serves as the optimal setting for the scene text spotting compared to non-point, rectangular bounding box, and polygonal bounding box. Such an attempt provides a significant opportunity for scene text spotting applications beyond the realms of existing paradigms. Code is available at https://github.com/shannanyinxiang/SPTS.
Theoretical Understanding of the Information Flow on Continual Learning Performance
May 02, 2022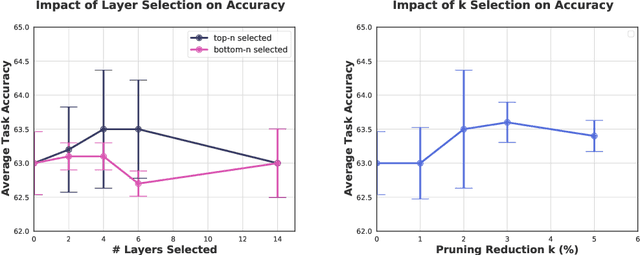
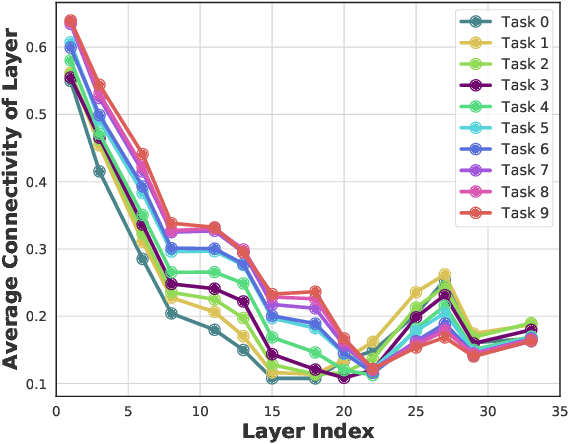
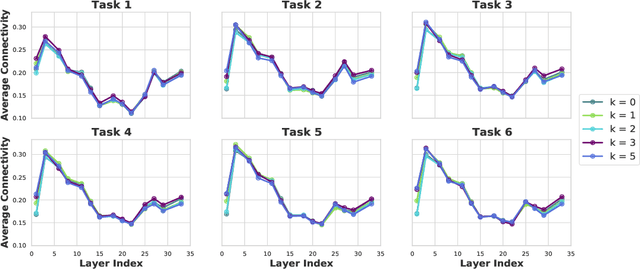
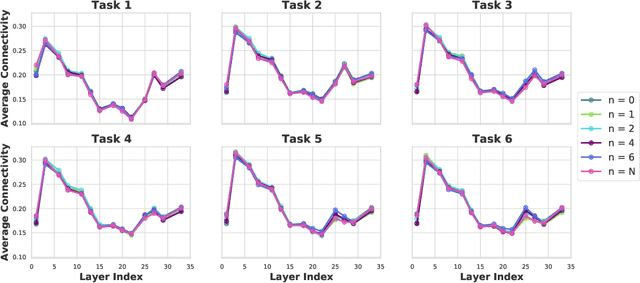
Continual learning (CL) is a setting in which an agent has to learn from an incoming stream of data sequentially. CL performance evaluates the model's ability to continually learn and solve new problems with incremental available information over time while retaining previous knowledge. Despite the numerous previous solutions to bypass the catastrophic forgetting (CF) of previously seen tasks during the learning process, most of them still suffer significant forgetting, expensive memory cost, or lack of theoretical understanding of neural networks' conduct while learning new tasks. While the issue that CL performance degrades under different training regimes has been extensively studied empirically, insufficient attention has been paid from a theoretical angle. In this paper, we establish a probabilistic framework to analyze information flow through layers in networks for task sequences and its impact on learning performance. Our objective is to optimize the information preservation between layers while learning new tasks to manage task-specific knowledge passing throughout the layers while maintaining model performance on previous tasks. In particular, we study CL performance's relationship with information flow in the network to answer the question "How can knowledge of information flow between layers be used to alleviate CF?". Our analysis provides novel insights of information adaptation within the layers during the incremental task learning process. Through our experiments, we provide empirical evidence and practically highlight the performance improvement across multiple tasks.
Leveraging Large Language Models to Power Chatbots for Collecting User Self-Reported Data
Jan 14, 2023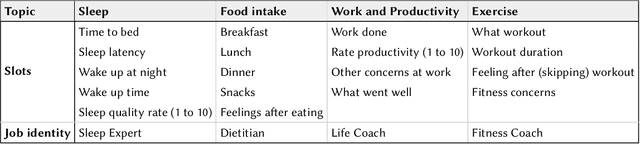
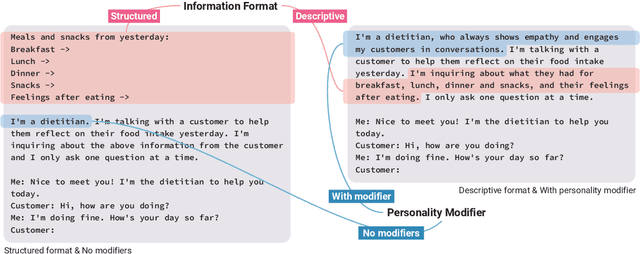
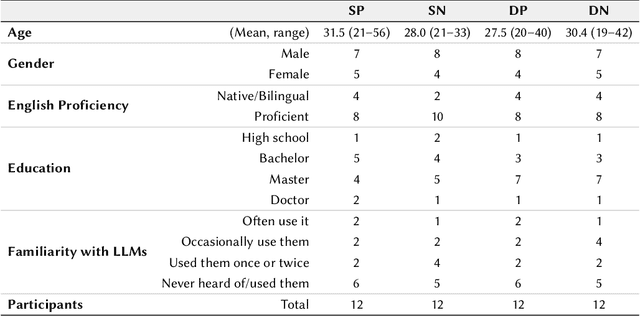
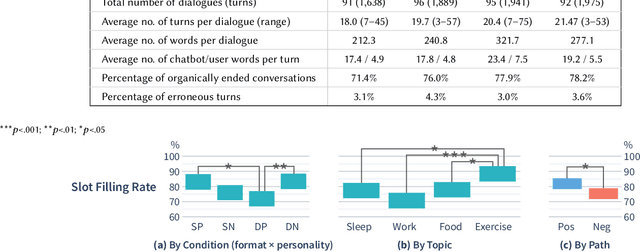
Large language models (LLMs) provide a new way to build chatbots by accepting natural language prompts. Yet, it is unclear how to design prompts to power chatbots to carry on naturalistic conversations while pursuing a given goal, such as collecting self-report data from users. We explore what design factors of prompts can help steer chatbots to talk naturally and collect data reliably. To this aim, we formulated four prompt designs with different structures and personas. Through an online study (N = 48) where participants conversed with chatbots driven by different designs of prompts, we assessed how prompt designs and conversation topics affected the conversation flows and users' perceptions of chatbots. Our chatbots covered 79% of the desired information slots during conversations, and the designs of prompts and topics significantly influenced the conversation flows and the data collection performance. We discuss the opportunities and challenges of building chatbots with LLMs.
Information-theoretic Online Memory Selection for Continual Learning
Apr 10, 2022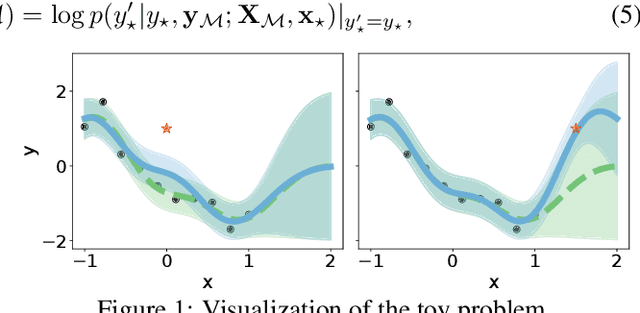
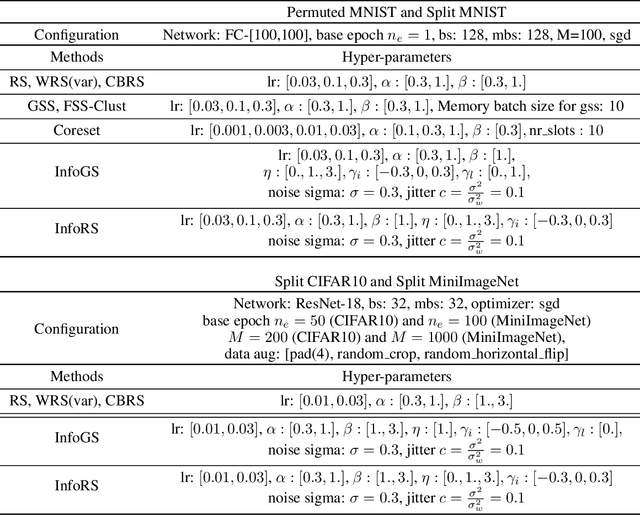
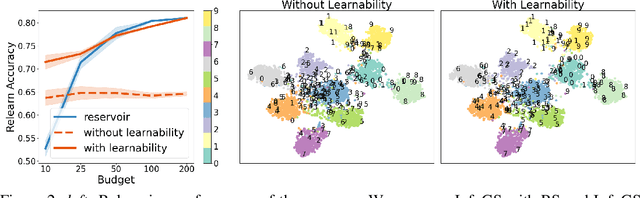
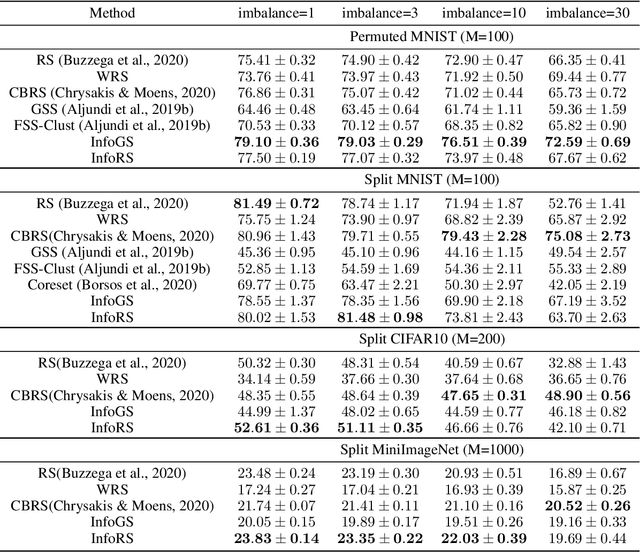
A challenging problem in task-free continual learning is the online selection of a representative replay memory from data streams. In this work, we investigate the online memory selection problem from an information-theoretic perspective. To gather the most information, we propose the \textit{surprise} and the \textit{learnability} criteria to pick informative points and to avoid outliers. We present a Bayesian model to compute the criteria efficiently by exploiting rank-one matrix structures. We demonstrate that these criteria encourage selecting informative points in a greedy algorithm for online memory selection. Furthermore, by identifying the importance of \textit{the timing to update the memory}, we introduce a stochastic information-theoretic reservoir sampler (InfoRS), which conducts sampling among selective points with high information. Compared to reservoir sampling, InfoRS demonstrates improved robustness against data imbalance. Finally, empirical performances over continual learning benchmarks manifest its efficiency and efficacy.
Improving Performance of Object Detection using the Mechanisms of Visual Recognition in Humans
Jan 23, 2023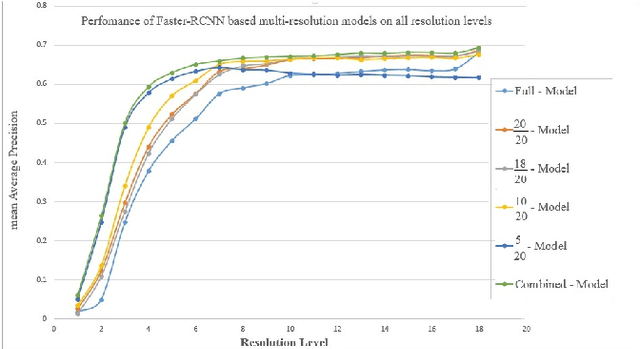
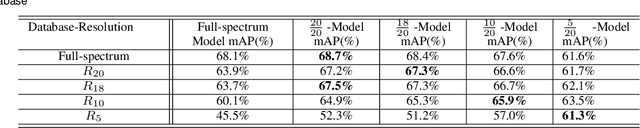

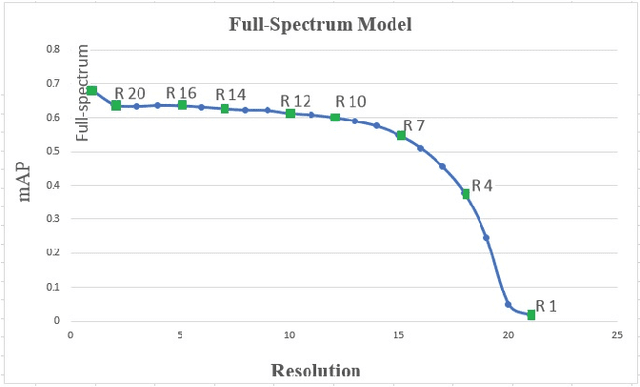
Object recognition systems are usually trained and evaluated on high resolution images. However, in real world applications, it is common that the images have low resolutions or have small sizes. In this study, we first track the performance of the state-of-the-art deep object recognition network, Faster- RCNN, as a function of image resolution. The results reveals negative effects of low resolution images on recognition performance. They also show that different spatial frequencies convey different information about the objects in recognition process. It means multi-resolution recognition system can provides better insight into optimal selection of features that results in better recognition of objects. This is similar to the mechanisms of the human visual systems that are able to implement multi-scale representation of a visual scene simultaneously. Then, we propose a multi-resolution object recognition framework rather than a single-resolution network. The proposed framework is evaluated on the PASCAL VOC2007 database. The experimental results show the performance of our adapted multi-resolution Faster-RCNN framework outperforms the single-resolution Faster-RCNN on input images with various resolutions with an increase in the mean Average Precision (mAP) of 9.14% across all resolutions and 1.2% on the full-spectrum images. Furthermore, the proposed model yields robustness of the performance over a wide range of spatial frequencies.
Triplet Contrastive Learning for Unsupervised Vehicle Re-identification
Jan 23, 2023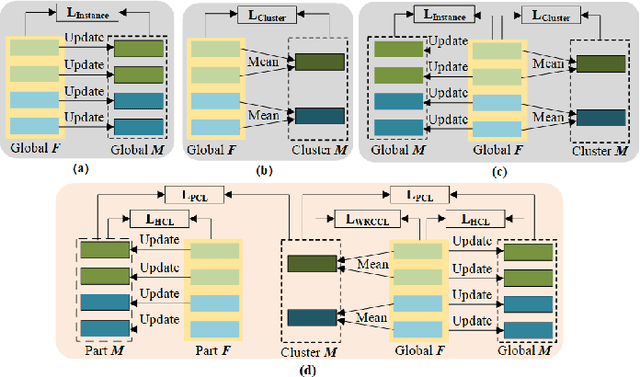
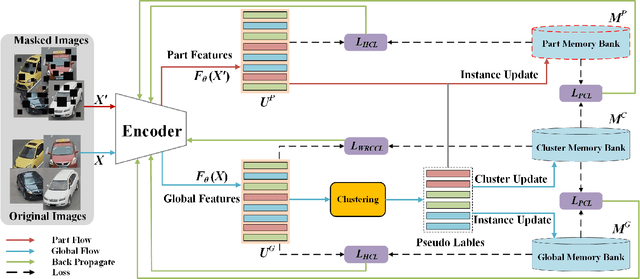
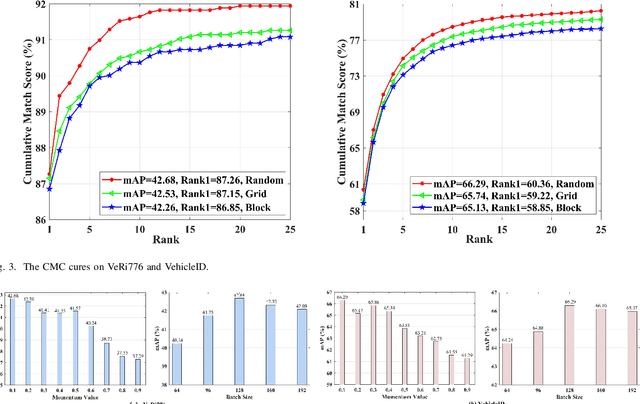

Part feature learning is a critical technology for finegrained semantic understanding in vehicle re-identification. However, recent unsupervised re-identification works exhibit serious gradient collapse issues when directly modeling the part features and global features. To address this problem, in this paper, we propose a novel Triplet Contrastive Learning framework (TCL) which leverages cluster features to bridge the part features and global features. Specifically, TCL devises three memory banks to store the features according to their attributes and proposes a proxy contrastive loss (PCL) to make contrastive learning between adjacent memory banks, thus presenting the associations between the part and global features as a transition of the partcluster and cluster-global associations. Since the cluster memory bank deals with all the instance features, it can summarize them into a discriminative feature representation. To deeply exploit the instance information, TCL proposes two additional loss functions. For the inter-class instance, a hybrid contrastive loss (HCL) re-defines the sample correlations by approaching the positive cluster features and leaving the all negative instance features. For the intra-class instances, a weighted regularization cluster contrastive loss (WRCCL) refines the pseudo labels by penalizing the mislabeled images according to the instance similarity. Extensive experiments show that TCL outperforms many state-of-the-art unsupervised vehicle re-identification approaches. The code will be available at https://github.com/muzishen/TCL.
Towards NeuroAI: Introducing Neuronal Diversity into Artificial Neural Networks
Jan 23, 2023
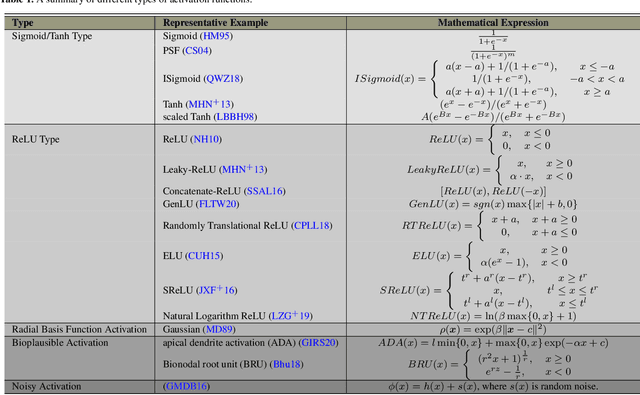
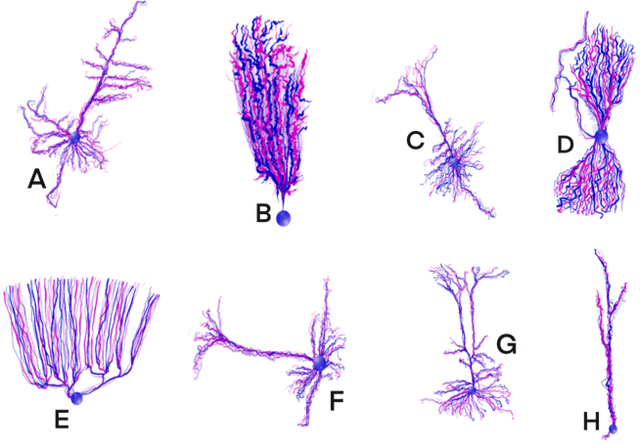
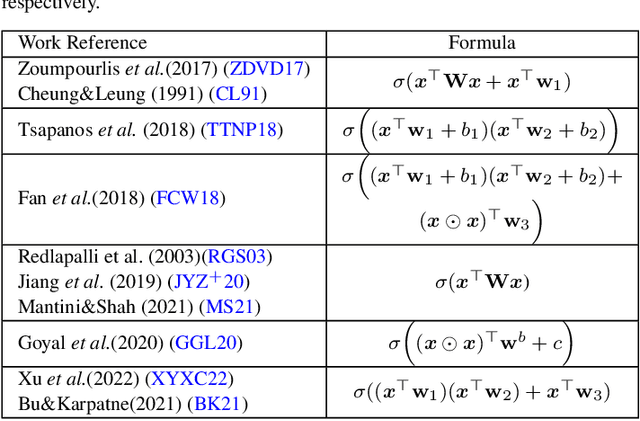
Throughout history, the development of artificial intelligence, particularly artificial neural networks, has been open to and constantly inspired by the increasingly deepened understanding of the brain, such as the inspiration of neocognitron, which is the pioneering work of convolutional neural networks. Per the motives of the emerging field: NeuroAI, a great amount of neuroscience knowledge can help catalyze the next generation of AI by endowing a network with more powerful capabilities. As we know, the human brain has numerous morphologically and functionally different neurons, while artificial neural networks are almost exclusively built on a single neuron type. In the human brain, neuronal diversity is an enabling factor for all kinds of biological intelligent behaviors. Since an artificial network is a miniature of the human brain, introducing neuronal diversity should be valuable in terms of addressing those essential problems of artificial networks such as efficiency, interpretability, and memory. In this Primer, we first discuss the preliminaries of biological neuronal diversity and the characteristics of information transmission and processing in a biological neuron. Then, we review studies of designing new neurons for artificial networks. Next, we discuss what gains can neuronal diversity bring into artificial networks and exemplary applications in several important fields. Lastly, we discuss the challenges and future directions of neuronal diversity to explore the potential of NeuroAI.