 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Distributed Subweb Specifications for Traversing the Web
Feb 28, 2023
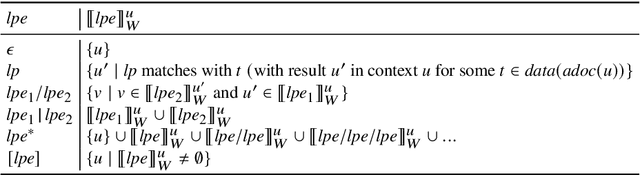
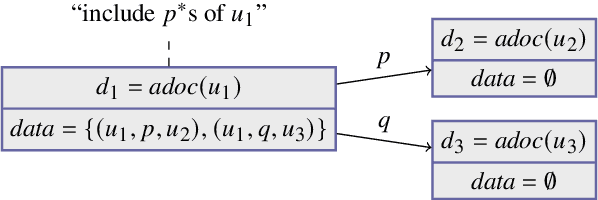

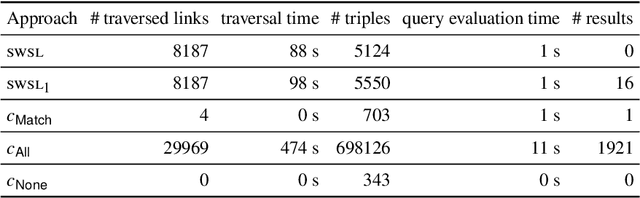
Link Traversal-based Query Processing (ltqp), in which a sparql query is evaluated over a web of documents rather than a single dataset, is often seen as a theoretically interesting yet impractical technique. However, in a time where the hypercentralization of data has increasingly come under scrutiny, a decentralized Web of Data with a simple document-based interface is appealing, as it enables data publishers to control their data and access rights. While ltqp allows evaluating complex queries over such webs, it suffers from performance issues (due to the high number of documents containing data) as well as information quality concerns (due to the many sources providing such documents). In existing ltqp approaches, the burden of finding sources to query is entirely in the hands of the data consumer. In this paper, we argue that to solve these issues, data publishers should also be able to suggest sources of interest and guide the data consumer towards relevant and trustworthy data. We introduce a theoretical framework that enables such guided link traversal and study its properties. We illustrate with a theoretic example that this can improve query results and reduce the number of network requests. We evaluate our proposal experimentally on a virtual linked web with specifications and indeed observe that not just the data quality but also the efficiency of querying improves. Under consideration in Theory and Practice of Logic Programming (TPLP).
An evaluation of Google Translate for Sanskrit to English translation via sentiment and semantic analysis
Feb 28, 2023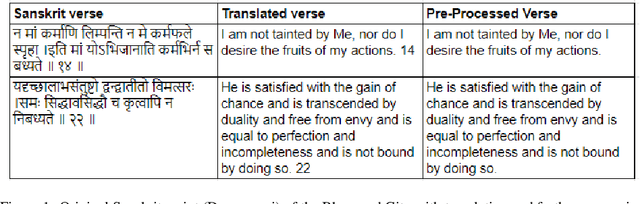
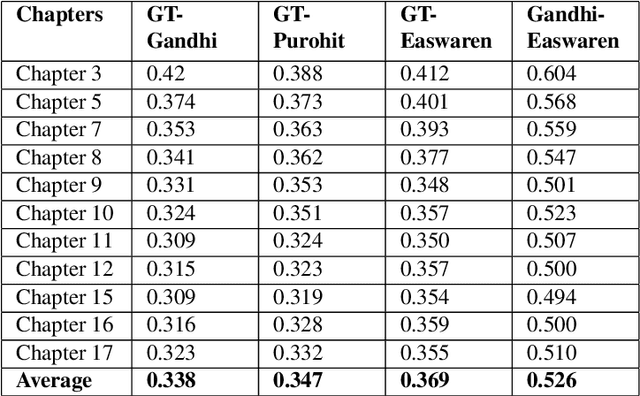
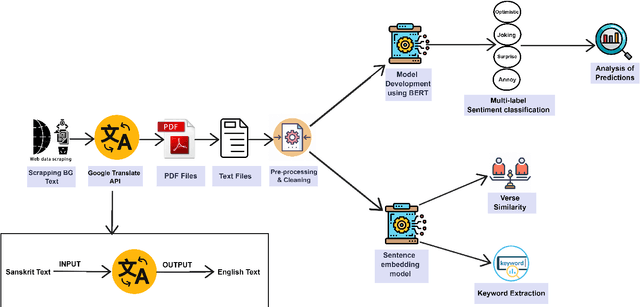
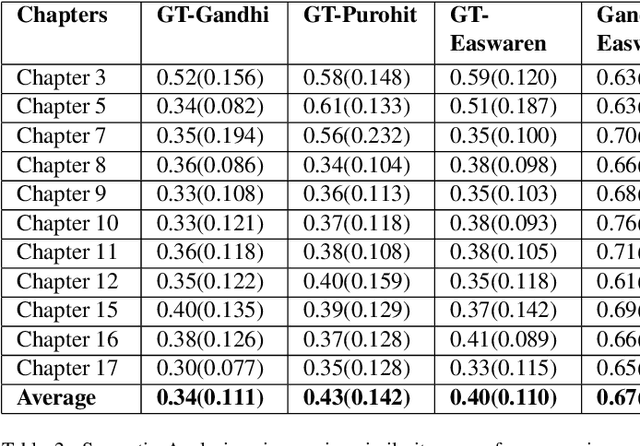
Google Translate has been prominent for language translation; however, limited work has been done in evaluating the quality of translation when compared to human experts. Sanskrit one of the oldest written languages in the world. In 2022, the Sanskrit language was added to the Google Translate engine. Sanskrit is known as the mother of languages such as Hindi and an ancient source of the Indo-European group of languages. Sanskrit is the original language for sacred Hindu texts such as the Bhagavad Gita. In this study, we present a framework that evaluates the Google Translate for Sanskrit using the Bhagavad Gita. We first publish a translation of the Bhagavad Gita in Sanskrit using Google Translate. Our framework then compares Google Translate version of Bhagavad Gita with expert translations using sentiment and semantic analysis via BERT-based language models. Our results indicate that in terms of sentiment and semantic analysis, there is low level of similarity in selected verses of Google Translate when compared to expert translations. In the qualitative evaluation, we find that Google translate is unsuitable for translation of certain Sanskrit words and phrases due to its poetic nature, contextual significance, metaphor and imagery. The mistranslations are not surprising since the Bhagavad Gita is known as a difficult text not only to translate, but also to interpret since it relies on contextual, philosophical and historical information. Our framework lays the foundation for automatic evaluation of other languages by Google Translate
Coarse-to-fine Hybrid 3D Mapping System with Co-calibrated Omnidirectional Camera and Non-repetitive LiDAR
Feb 08, 2023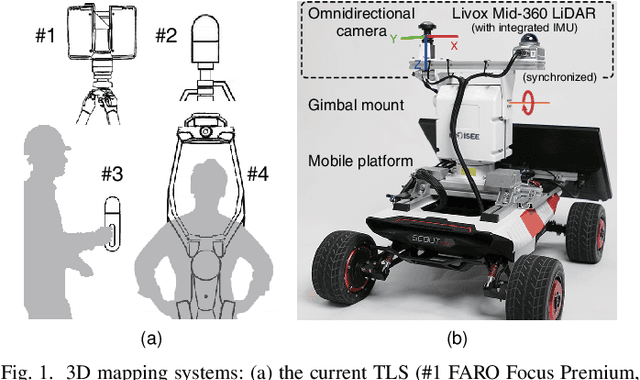
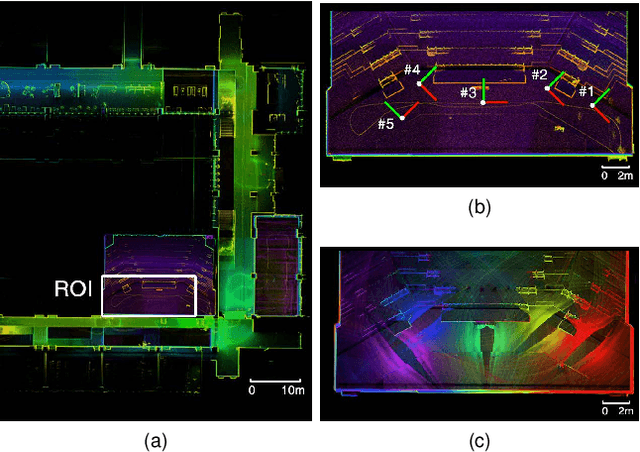
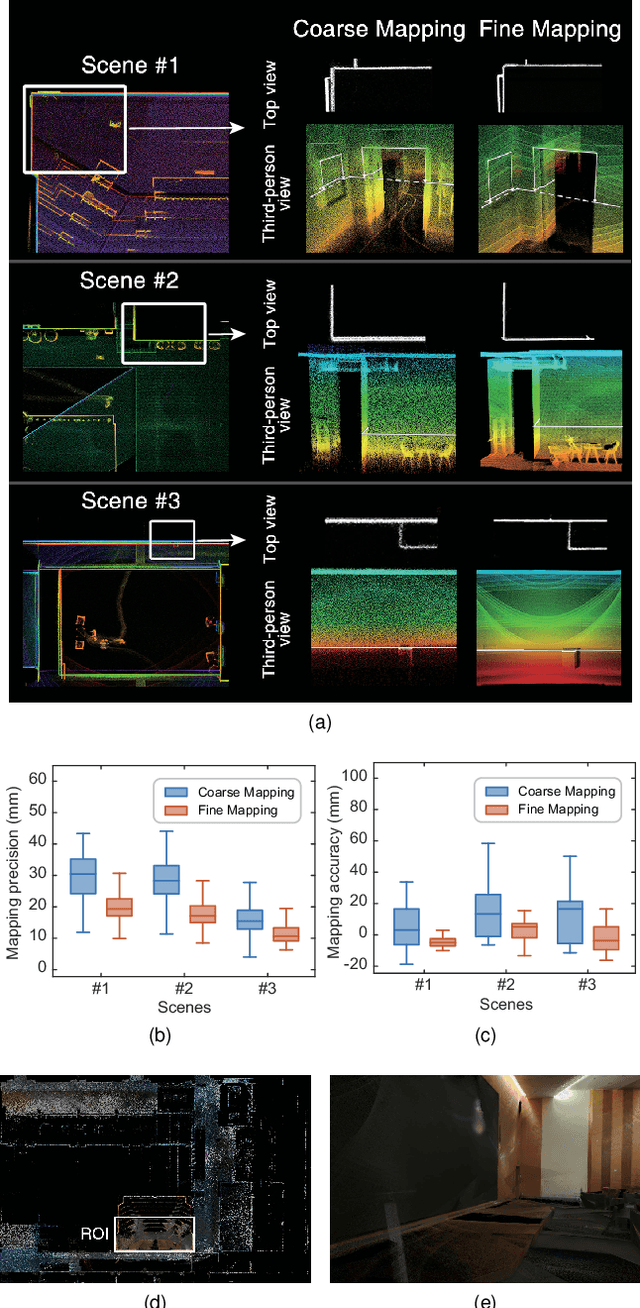
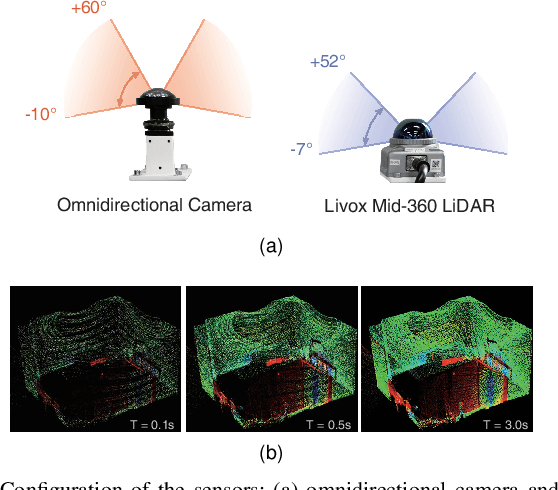
This paper presents a novel 3D mapping robot with an omnidirectional field-of-view (FoV) sensor suite composed of a non-repetitive LiDAR and an omnidirectional camera. Thanks to the non-repetitive scanning nature of the LiDAR, an automatic targetless co-calibration method is proposed to simultaneously calibrate the intrinsic parameters for the omnidirectional camera and the extrinsic parameters for the camera and LiDAR, which is crucial for the required step in bringing color and texture information to the point clouds in surveying and mapping tasks. Comparisons and analyses are made to target-based intrinsic calibration and mutual information (MI)-based extrinsic calibration, respectively. With this co-calibrated sensor suite, the hybrid mapping robot integrates both the odometry-based mapping mode and stationary mapping mode. Meanwhile, we proposed a new workflow to achieve coarse-to-fine mapping, including efficient and coarse mapping in a global environment with odometry-based mapping mode; planning for viewpoints in the region-of-interest (ROI) based on the coarse map (relies on the previous work); navigating to each viewpoint and performing finer and more precise stationary scanning and mapping of the ROI. The fine map is stitched with the global coarse map, which provides a more efficient and precise result than the conventional stationary approaches and the emerging odometry-based approaches, respectively.
Adapting Pre-trained Vision Transformers from 2D to 3D through Weight Inflation Improves Medical Image Segmentation
Feb 08, 2023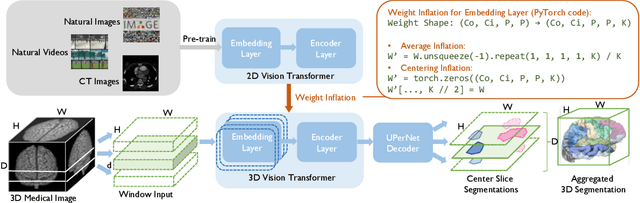
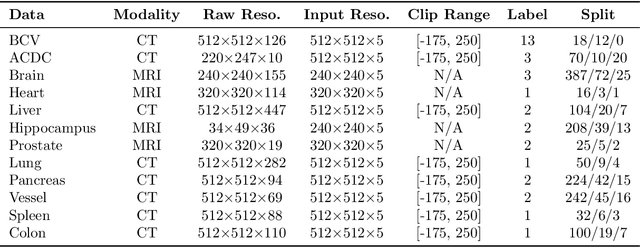
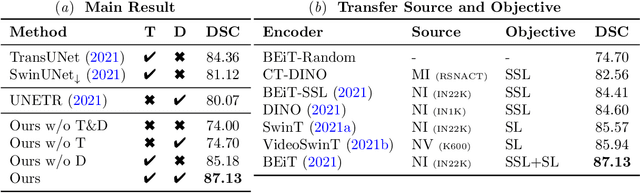
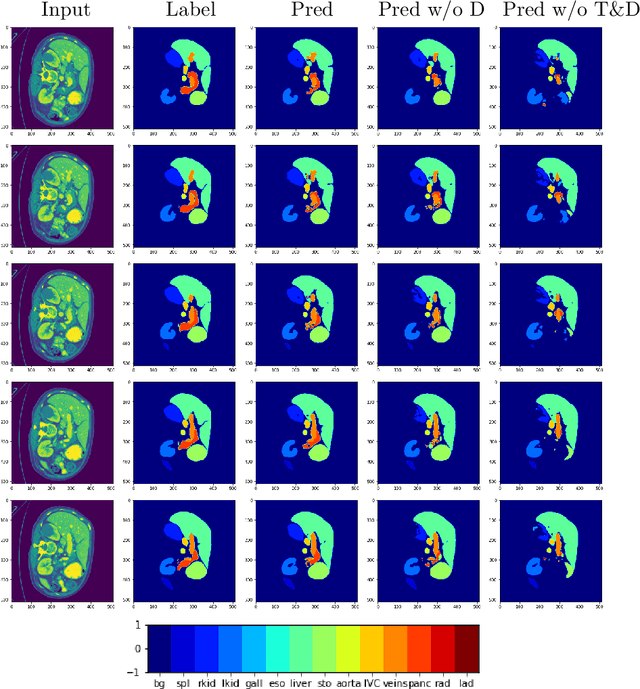
Given the prevalence of 3D medical imaging technologies such as MRI and CT that are widely used in diagnosing and treating diverse diseases, 3D segmentation is one of the fundamental tasks of medical image analysis. Recently, Transformer-based models have started to achieve state-of-the-art performances across many vision tasks, through pre-training on large-scale natural image benchmark datasets. While works on medical image analysis have also begun to explore Transformer-based models, there is currently no optimal strategy to effectively leverage pre-trained Transformers, primarily due to the difference in dimensionality between 2D natural images and 3D medical images. Existing solutions either split 3D images into 2D slices and predict each slice independently, thereby losing crucial depth-wise information, or modify the Transformer architecture to support 3D inputs without leveraging pre-trained weights. In this work, we use a simple yet effective weight inflation strategy to adapt pre-trained Transformers from 2D to 3D, retaining the benefit of both transfer learning and depth information. We further investigate the effectiveness of transfer from different pre-training sources and objectives. Our approach achieves state-of-the-art performances across a broad range of 3D medical image datasets, and can become a standard strategy easily utilized by all work on Transformer-based models for 3D medical images, to maximize performance.
A Parametric Similarity Method: Comparative Experiments based on Semantically Annotated Large Datasets
Feb 08, 2023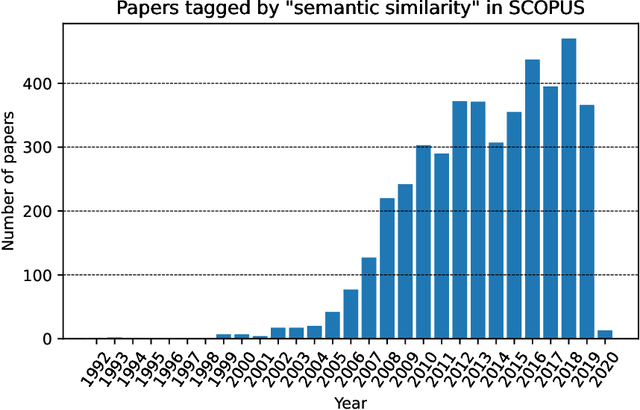
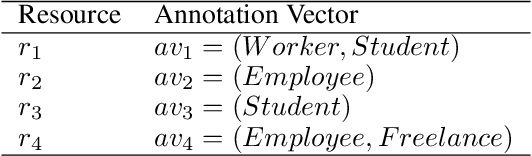
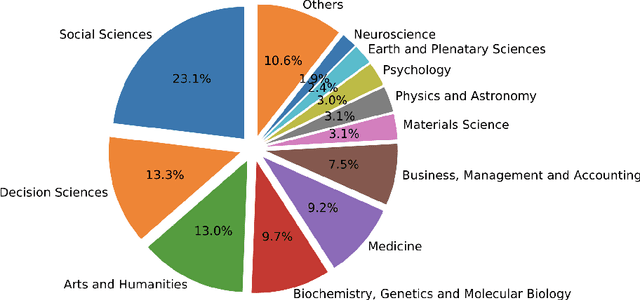
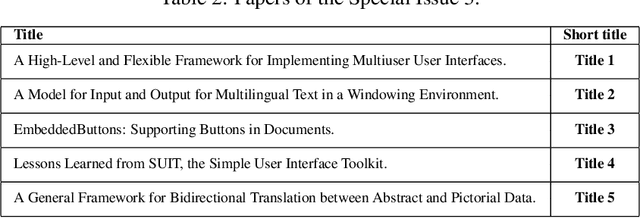
We present the parametric method SemSimp aimed at measuring semantic similarity of digital resources. SemSimp is based on the notion of information content, and it leverages a reference ontology and taxonomic reasoning, encompassing different approaches for weighting the concepts of the ontology. In particular, weights can be computed by considering either the available digital resources or the structure of the reference ontology of a given domain. SemSimp is assessed against six representative semantic similarity methods for comparing sets of concepts proposed in the literature, by carrying out an experimentation that includes both a statistical analysis and an expert judgement evaluation. To the purpose of achieving a reliable assessment, we used a real-world large dataset based on the Digital Library of the Association for Computing Machinery (ACM), and a reference ontology derived from the ACM Computing Classification System (ACM-CCS). For each method, we considered two indicators. The first concerns the degree of confidence to identify the similarity among the papers belonging to some special issues selected from the ACM Transactions on Information Systems journal, the second the Pearson correlation with human judgement. The results reveal that one of the configurations of SemSimp outperforms the other assessed methods. An additional experiment performed in the domain of physics shows that, in general, SemSimp provides better results than the other similarity methods.
* 32 pages, 9 figures, 11 tables
ASDF: A Differential Testing Framework for Automatic Speech Recognition Systems
Feb 11, 2023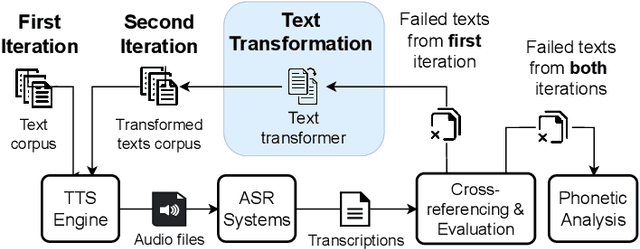
Recent years have witnessed wider adoption of Automated Speech Recognition (ASR) techniques in various domains. Consequently, evaluating and enhancing the quality of ASR systems is of great importance. This paper proposes ASDF, an Automated Speech Recognition Differential Testing Framework for testing ASR systems. ASDF extends an existing ASR testing tool, the CrossASR++, which synthesizes test cases from a text corpus. However, CrossASR++ fails to make use of the text corpus efficiently and provides limited information on how the failed test cases can improve ASR systems. To address these limitations, our tool incorporates two novel features: (1) a text transformation module to boost the number of generated test cases and uncover more errors in ASR systems and (2) a phonetic analysis module to identify on which phonemes the ASR system tend to produce errors. ASDF generates more high-quality test cases by applying various text transformation methods (e.g., change tense) to the texts in failed test cases. By doing so, ASDF can utilize a small text corpus to generate a large number of audio test cases, something which CrossASR++ is not capable of. In addition, ASDF implements more metrics to evaluate the performance of ASR systems from multiple perspectives. ASDF performs phonetic analysis on the identified failed test cases to identify the phonemes that ASR systems tend to transcribe incorrectly, providing useful information for developers to improve ASR systems. The demonstration video of our tool is made online at https://www.youtube.com/watch?v=DzVwfc3h9As. The implementation is available at https://github.com/danielyuenhx/asdf-differential-testing.
Fair Attribute Completion on Graph with Missing Attributes
Feb 25, 2023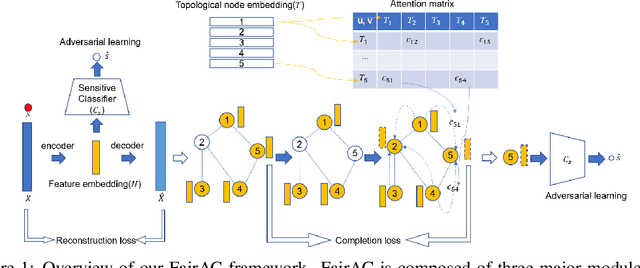
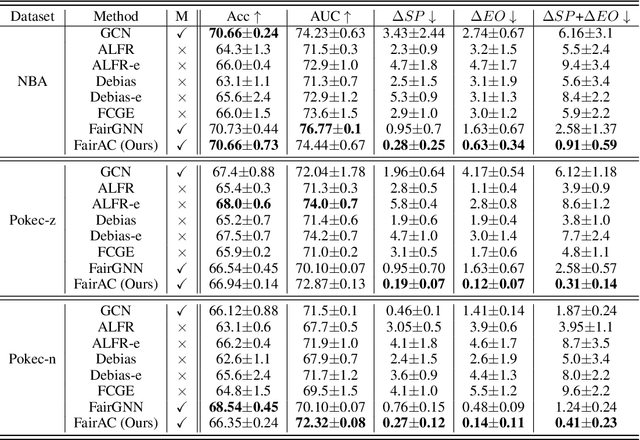
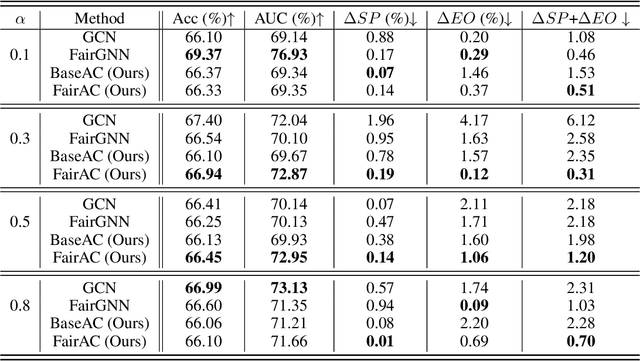
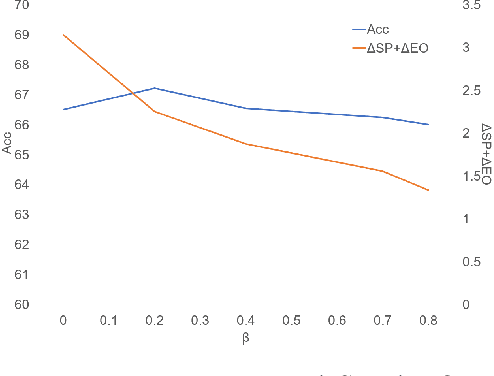
Tackling unfairness in graph learning models is a challenging task, as the unfairness issues on graphs involve both attributes and topological structures. Existing work on fair graph learning simply assumes that attributes of all nodes are available for model training and then makes fair predictions. In practice, however, the attributes of some nodes might not be accessible due to missing data or privacy concerns, which makes fair graph learning even more challenging. In this paper, we propose FairAC, a fair attribute completion method, to complement missing information and learn fair node embeddings for graphs with missing attributes. FairAC adopts an attention mechanism to deal with the attribute missing problem and meanwhile, it mitigates two types of unfairness, i.e., feature unfairness from attributes and topological unfairness due to attribute completion. FairAC can work on various types of homogeneous graphs and generate fair embeddings for them and thus can be applied to most downstream tasks to improve their fairness performance. To our best knowledge, FairAC is the first method that jointly addresses the graph attribution completion and graph unfairness problems. Experimental results on benchmark datasets show that our method achieves better fairness performance with less sacrifice in accuracy, compared with the state-of-the-art methods of fair graph learning.
Knowledge-infused Contrastive Learning for Urban Imagery-based Socioeconomic Prediction
Feb 25, 2023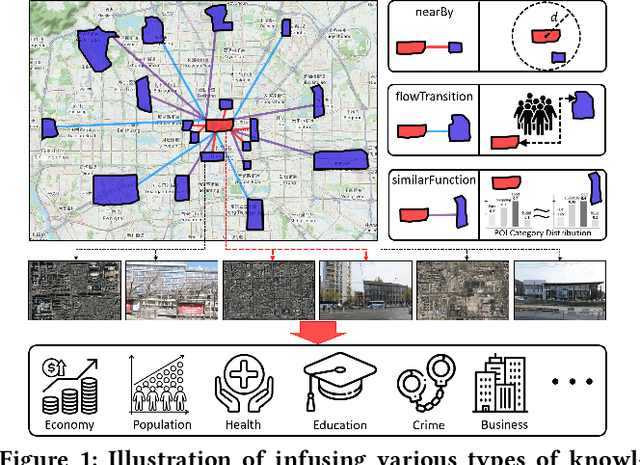
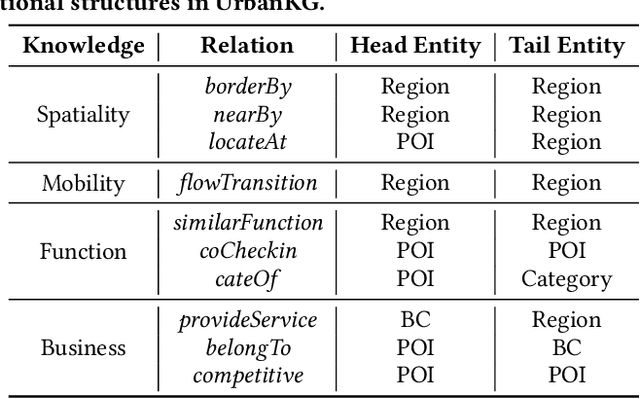
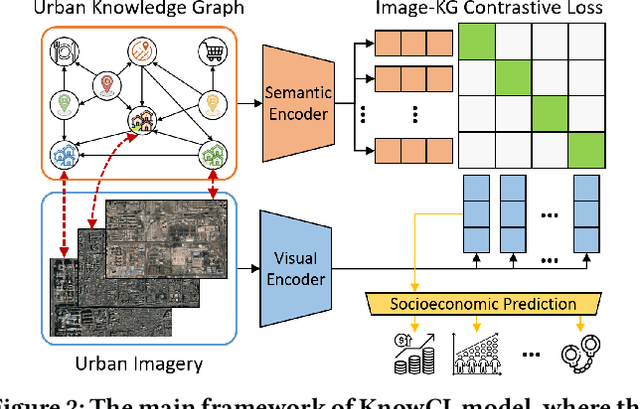
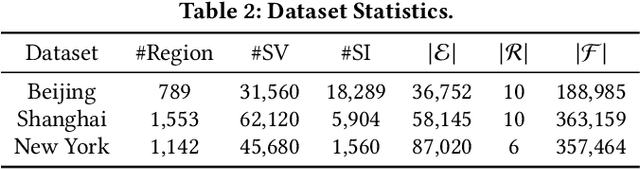
Monitoring sustainable development goals requires accurate and timely socioeconomic statistics, while ubiquitous and frequently-updated urban imagery in web like satellite/street view images has emerged as an important source for socioeconomic prediction. Especially, recent studies turn to self-supervised contrastive learning with manually designed similarity metrics for urban imagery representation learning and further socioeconomic prediction, which however suffers from effectiveness and robustness issues. To address such issues, in this paper, we propose a Knowledge-infused Contrastive Learning (KnowCL) model for urban imagery-based socioeconomic prediction. Specifically, we firstly introduce knowledge graph (KG) to effectively model the urban knowledge in spatiality, mobility, etc., and then build neural network based encoders to learn representations of an urban image in associated semantic and visual spaces, respectively. Finally, we design a cross-modality based contrastive learning framework with a novel image-KG contrastive loss, which maximizes the mutual information between semantic and visual representations for knowledge infusion. Extensive experiments of applying the learnt visual representations for socioeconomic prediction on three datasets demonstrate the superior performance of KnowCL with over 30\% improvements on $R^2$ compared with baselines. Especially, our proposed KnowCL model can apply to both satellite and street imagery with both effectiveness and transferability achieved, which provides insights into urban imagery-based socioeconomic prediction.
A Surrogate-Assisted Highly Cooperative Coevolutionary Algorithm for Hyperparameter Optimization in Deep Convolutional Neural Network
Feb 25, 2023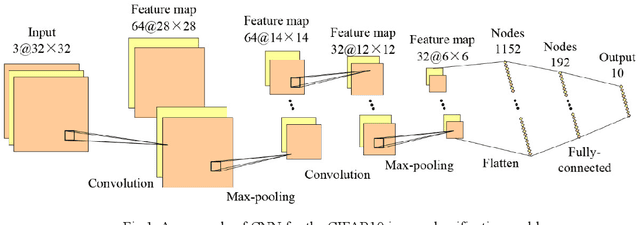
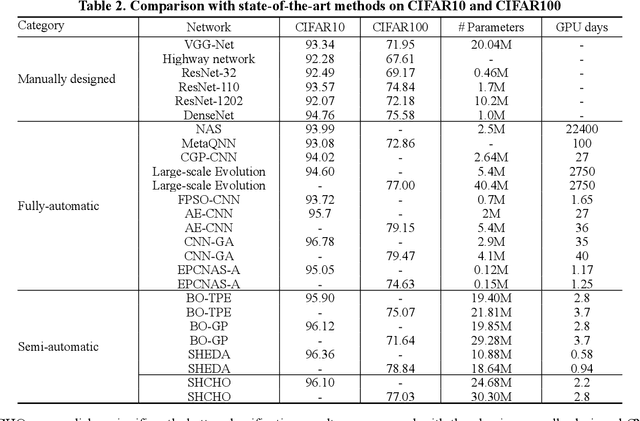

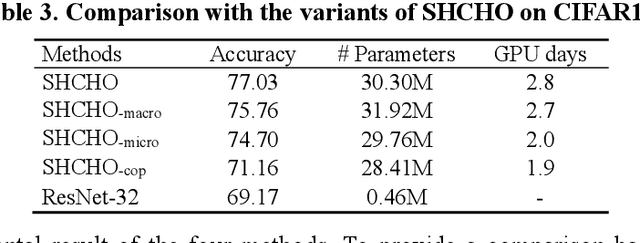
Convolutional neural networks (CNNs) have gained remarkable success in recent years. However, their performance highly relies on the architecture hyperparameters, and finding proper hyperparameters for a deep CNN is a challenging optimization problem owing to its high-dimensional and computationally expensive characteristics. Given these difficulties, this study proposes a surrogate-assisted highly cooperative hyperparameter optimization (SHCHO) algorithm for chain-styled CNNs. To narrow the large search space, SHCHO first decomposes the whole CNN into several overlapping sub-CNNs in accordance with the overlapping hyperparameter interaction structure and then cooperatively optimizes these hyperparameter subsets. Two cooperation mechanisms are designed during this process. One coordinates all the sub-CNNs to reproduce the information flow in the whole CNN and achieve macro cooperation among them, and the other tackles the overlapping components by simultaneously considering the involved two sub-CNNs and facilitates micro cooperation between them. As a result, a proper hyperparameter configuration can be effectively located for the whole CNN. Besides, SHCHO also employs the well-performing surrogate technique to assist in the hyperparameter optimization of each sub-CNN, thereby greatly reducing the expensive computational cost. Extensive experimental results on two widely-used image classification datasets indicate that SHCHO can significantly improve the performance of CNNs.
Knowledge Graph Completion with Counterfactual Augmentation
Feb 25, 2023
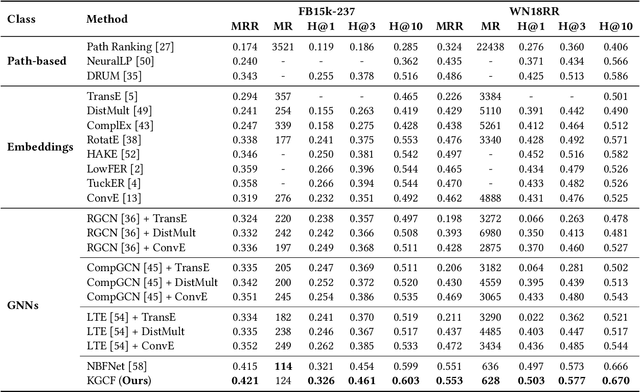
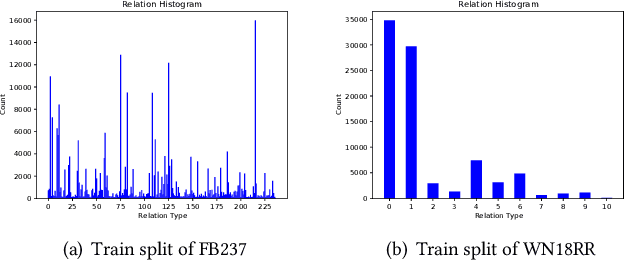
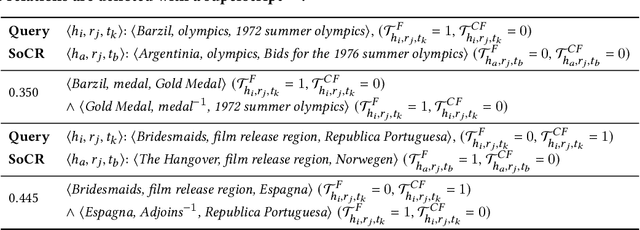
Graph Neural Networks (GNNs) have demonstrated great success in Knowledge Graph Completion (KGC) by modeling how entities and relations interact in recent years. However, most of them are designed to learn from the observed graph structure, which appears to have imbalanced relation distribution during the training stage. Motivated by the causal relationship among the entities on a knowledge graph, we explore this defect through a counterfactual question: "would the relation still exist if the neighborhood of entities became different from observation?". With a carefully designed instantiation of a causal model on the knowledge graph, we generate the counterfactual relations to answer the question by regarding the representations of entity pair given relation as context, structural information of relation-aware neighborhood as treatment, and validity of the composed triplet as the outcome. Furthermore, we incorporate the created counterfactual relations with the GNN-based framework on KGs to augment their learning of entity pair representations from both the observed and counterfactual relations. Experiments on benchmarks show that our proposed method outperforms existing methods on the task of KGC, achieving new state-of-the-art results. Moreover, we demonstrate that the proposed counterfactual relations-based augmentation also enhances the interpretability of the GNN-based framework through the path interpretations of predictions.