 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
V2V-based Collision-avoidance Decision Strategy for Autonomous Vehicles Interacting with Fully Occluded Pedestrians at Midblock on Multilane Roadways
Mar 23, 2023
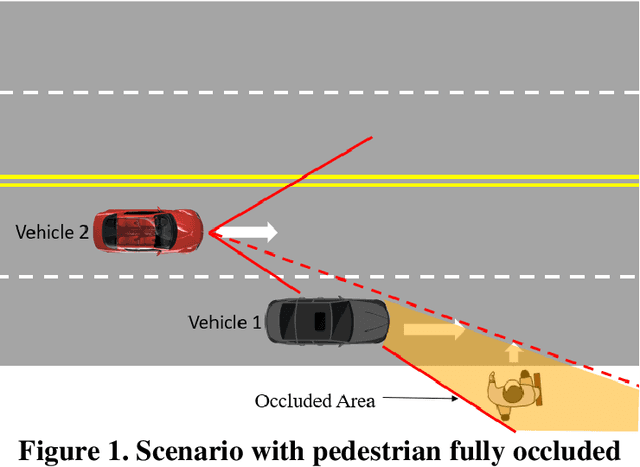
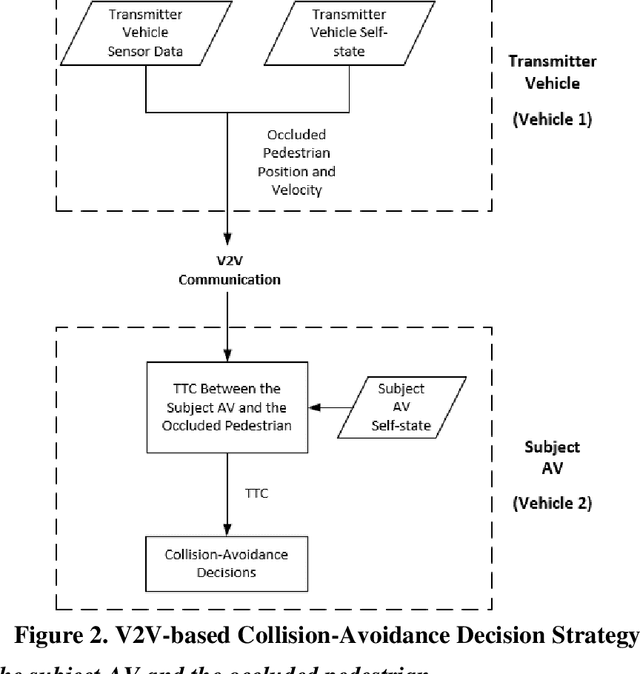
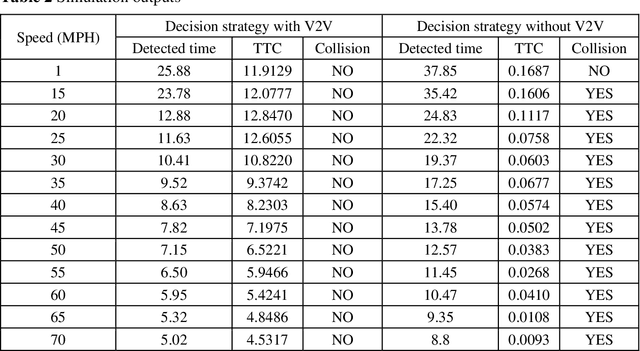
Pedestrian occlusion is challenging for autonomous vehicles (AVs) at midblock locations on multilane roadways because an AV cannot detect crossing pedestrians that are fully occluded by downstream vehicles in adjacent lanes. This paper tests the capability of vehicle-to-vehicle (V2V) communication between an AV and its downstream vehicles to share midblock pedestrian crossings information. The researchers developed a V2V-based collision-avoidance decision strategy and compared it to a base scenario (i.e., decision strategy without the utilization of V2V). Simulation results showed that for the base scenario, the near-zero time-to-collision (TTC) indicated no time for the AV to take appropriate action and resulted in dramatic braking followed by collisions. But the V2V-based collision-avoidance decision strategy allowed for a proportional braking approach to increase the TTC allowing the pedestrian to cross safely. To conclude, the V2V-based collision-avoidance decision strategy has higher safety benefits for an AV interacting with fully occluded pedestrians at midblock locations on multilane roadways.
Retrieval-Augmented Classification with Decoupled Representation
Mar 23, 2023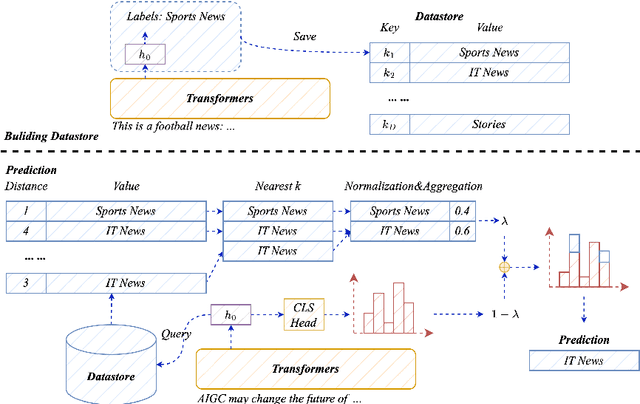
Pretrained language models (PLMs) have shown marvelous improvements across various NLP tasks. Most Chinese PLMs simply treat an input text as a sequence of characters, and completely ignore word information. Although Whole Word Masking can alleviate this, the semantics in words is still not well represented. In this paper, we revisit the segmentation granularity of Chinese PLMs. We propose a mixed-granularity Chinese BERT (MigBERT) by considering both characters and words. To achieve this, we design objective functions for learning both character and word-level representations. We conduct extensive experiments on various Chinese NLP tasks to evaluate existing PLMs as well as the proposed MigBERT. Experimental results show that MigBERT achieves new SOTA performance on all these tasks. Further analysis demonstrates that words are semantically richer than characters. More interestingly, we show that MigBERT also works with Japanese. Our code has been released here~\footnote{\url{https://github.com/xnliang98/MigBERT}} and you can download our model here~\footnote{\url{https://huggingface.co/xnliang/MigBERT-large/}}.
Textless Speech-to-Music Retrieval Using Emotion Similarity
Mar 19, 2023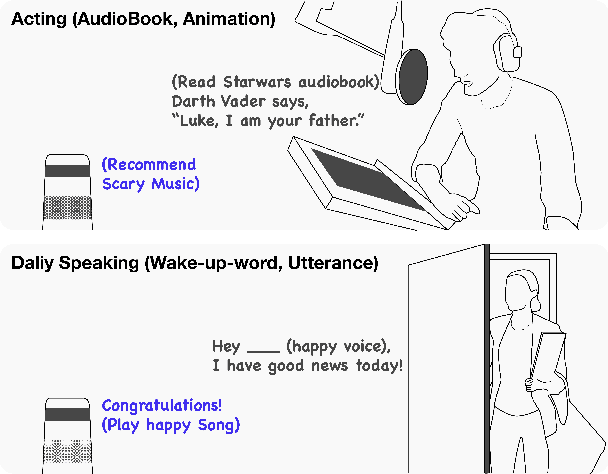
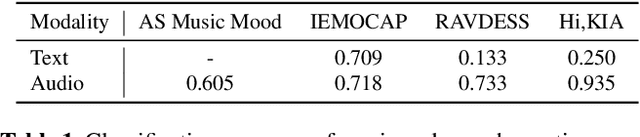
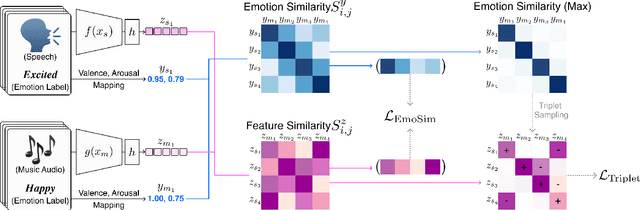

We introduce a framework that recommends music based on the emotions of speech. In content creation and daily life, speech contains information about human emotions, which can be enhanced by music. Our framework focuses on a cross-domain retrieval system to bridge the gap between speech and music via emotion labels. We explore different speech representations and report their impact on different speech types, including acting voice and wake-up words. We also propose an emotion similarity regularization term in cross-domain retrieval tasks. By incorporating the regularization term into training, similar speech-and-music pairs in the emotion space are closer in the joint embedding space. Our comprehensive experimental results show that the proposed model is effective in textless speech-to-music retrieval.
Character, Word, or Both? Revisiting the Segmentation Granularity for Chinese Pre-trained Language Models
Mar 22, 2023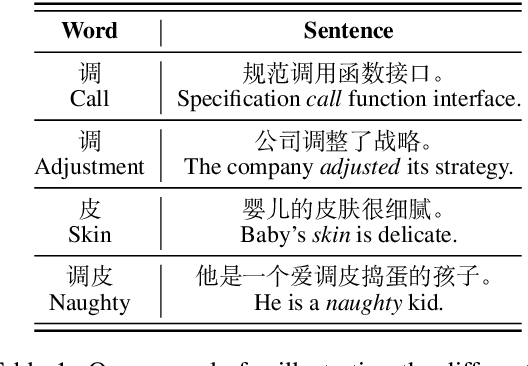
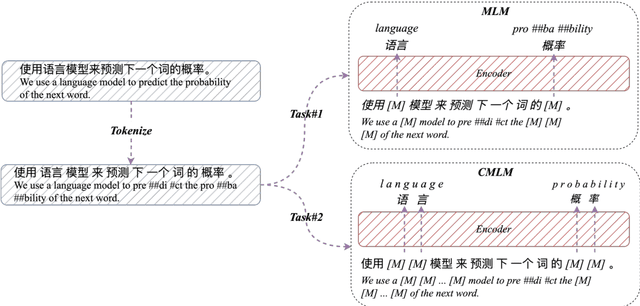
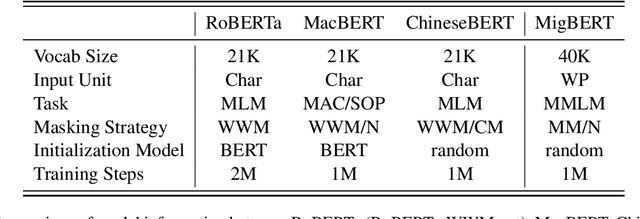
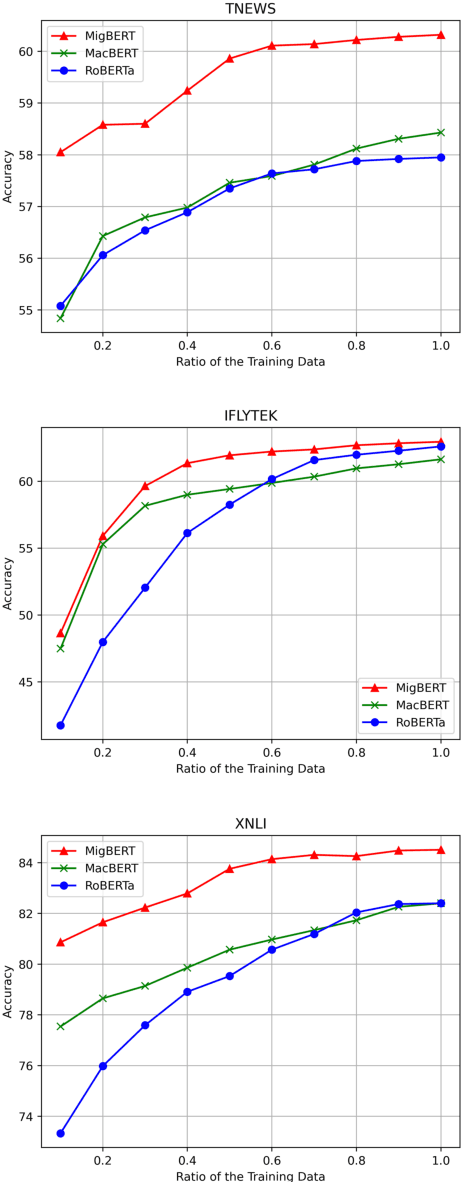
Pretrained language models (PLMs) have shown marvelous improvements across various NLP tasks. Most Chinese PLMs simply treat an input text as a sequence of characters, and completely ignore word information. Although Whole Word Masking can alleviate this, the semantics in words is still not well represented. In this paper, we revisit the segmentation granularity of Chinese PLMs. We propose a mixed-granularity Chinese BERT (MigBERT) by considering both characters and words. To achieve this, we design objective functions for learning both character and word-level representations. We conduct extensive experiments on various Chinese NLP tasks to evaluate existing PLMs as well as the proposed MigBERT. Experimental results show that MigBERT achieves new SOTA performance on all these tasks. Further analysis demonstrates that words are semantically richer than characters. More interestingly, we show that MigBERT also works with Japanese. Our code and model have been released here~\footnote{https://github.com/xnliang98/MigBERT}.
Feature Reduction Method Comparison Towards Explainability and Efficiency in Cybersecurity Intrusion Detection Systems
Mar 22, 2023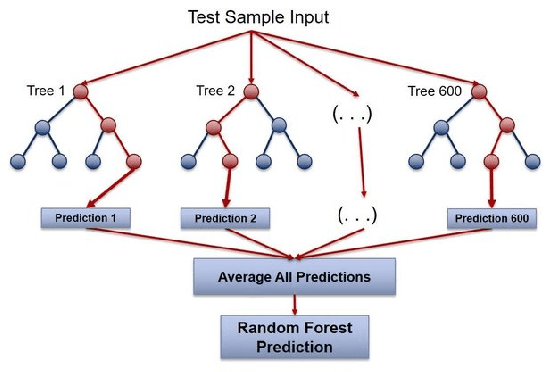
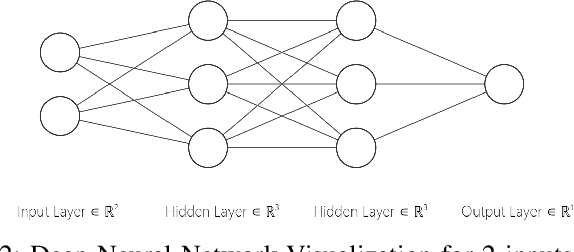
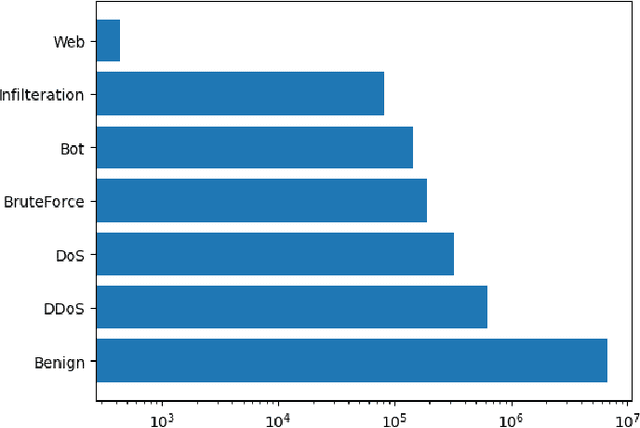
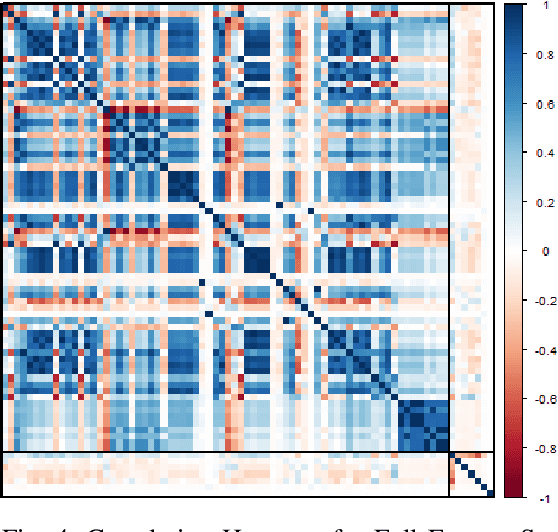
In the realm of cybersecurity, intrusion detection systems (IDS) detect and prevent attacks based on collected computer and network data. In recent research, IDS models have been constructed using machine learning (ML) and deep learning (DL) methods such as Random Forest (RF) and deep neural networks (DNN). Feature selection (FS) can be used to construct faster, more interpretable, and more accurate models. We look at three different FS techniques; RF information gain (RF-IG), correlation feature selection using the Bat Algorithm (CFS-BA), and CFS using the Aquila Optimizer (CFS-AO). Our results show CFS-BA to be the most efficient of the FS methods, building in 55% of the time of the best RF-IG model while achieving 99.99% of its accuracy. This reinforces prior contributions attesting to CFS-BA's accuracy while building upon the relationship between subset size, CFS score, and RF-IG score in final results.
* Published in 2022 21st IEEE International Conference on Machine Learning and Applications. 8 pages. 5 figures
GeoSpark: Sparking up Point Cloud Segmentation with Geometry Clue
Mar 14, 2023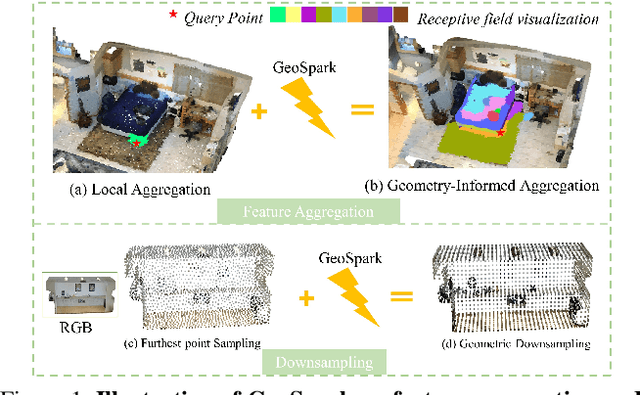
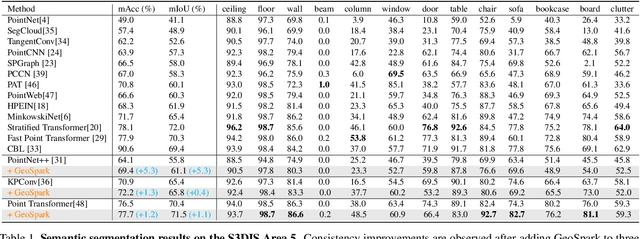
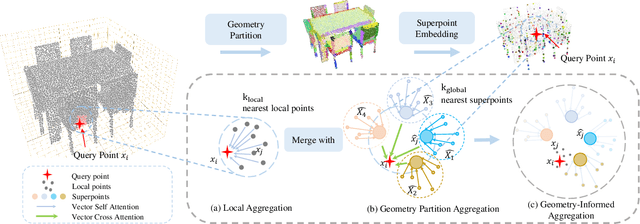
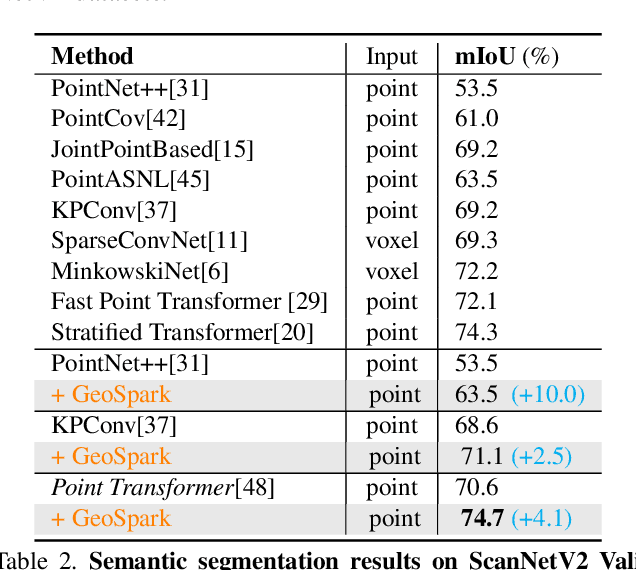
Current point cloud segmentation architectures suffer from limited long-range feature modeling, as they mostly rely on aggregating information with local neighborhoods. Furthermore, in order to learn point features at multiple scales, most methods utilize a data-agnostic sampling approach to decrease the number of points after each stage. Such sampling methods, however, often discard points for small objects in the early stages, leading to inadequate feature learning. We believe these issues are can be mitigated by introducing explicit geometry clues as guidance. To this end, we propose GeoSpark, a Plug-in module that incorporates Geometry clues into the network to Spark up feature learning and downsampling. GeoSpark can be easily integrated into various backbones. For feature aggregation, it improves feature modeling by allowing the network to learn from both local points and neighboring geometry partitions, resulting in an enlarged data-tailored receptive field. Additionally, GeoSpark utilizes geometry partition information to guide the downsampling process, where points with unique features are preserved while redundant points are fused, resulting in better preservation of key points throughout the network. We observed consistent improvements after adding GeoSpark to various backbones including PointNet++, KPConv, and PointTransformer. Notably, when integrated with Point Transformer, our GeoSpark module achieves a 74.7% mIoU on the ScanNetv2 dataset (4.1% improvement) and 71.5% mIoU on the S3DIS Area 5 dataset (1.1% improvement), ranking top on both benchmarks. Code and models will be made publicly available.
Symbolic Synthesis of Neural Networks
Mar 14, 2023
Neural networks adapt very well to distributed and continuous representations, but struggle to generalize from small amounts of data. Symbolic systems commonly achieve data efficient generalization by exploiting modularity to benefit from local and discrete features of a representation. These features allow symbolic programs to be improved one module at a time and to experience combinatorial growth in the values they can successfully process. However, it is difficult to design a component that can be used to form symbolic abstractions and which is adequately overparametrized to learn arbitrary high-dimensional transformations. I present Graph-based Symbolically Synthesized Neural Networks (G-SSNNs), a class of neural modules that operate on representations modified with synthesized symbolic programs to include a fixed set of local and discrete features. I demonstrate that the choice of injected features within a G-SSNN module modulates the data efficiency and generalization of baseline neural models, creating predictable patterns of both heightened and curtailed generalization. By training G-SSNNs, we also derive information about desirable semantics of symbolic programs without manual engineering. This information is compact and amenable to abstraction, but can also be flexibly recontextualized for other high-dimensional settings. In future work, I will investigate data efficient generalization and the transferability of learned symbolic representations in more complex G-SSNN designs based on more complex classes of symbolic programs. Experimental code and data are available at https://github.com/shlomenu/symbolically_synthesized_networks .
You Can Ground Earlier than See: An Effective and Efficient Pipeline for Temporal Sentence Grounding in Compressed Videos
Mar 14, 2023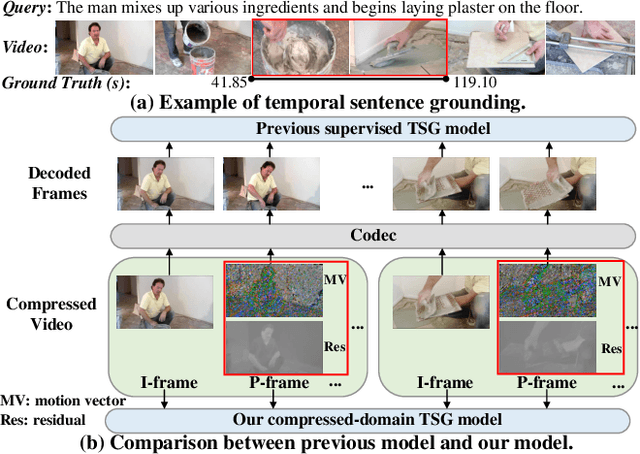
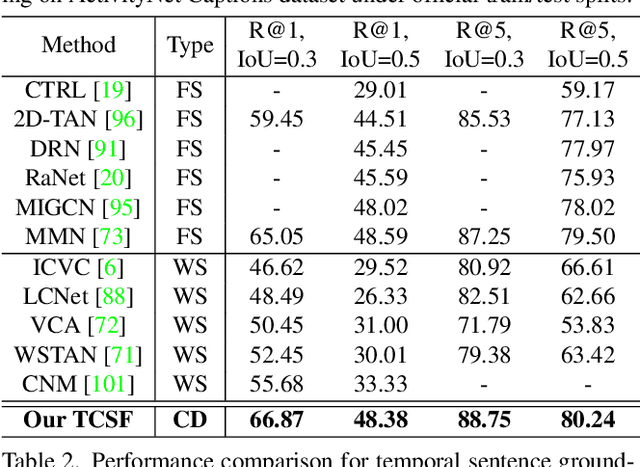
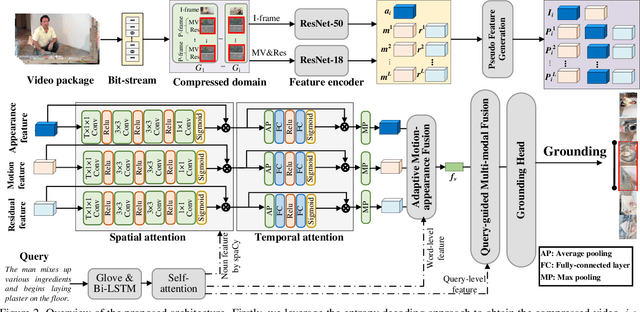
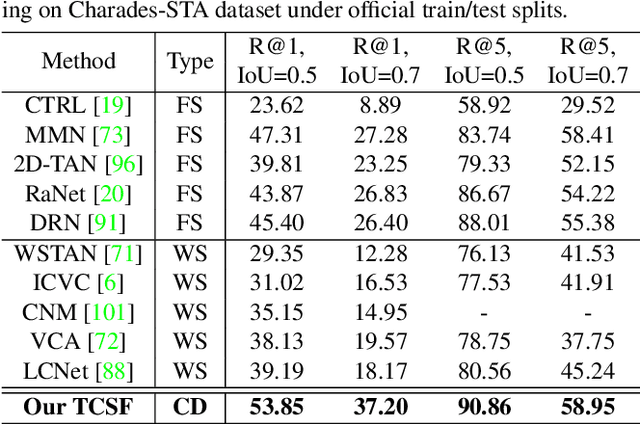
Given an untrimmed video, temporal sentence grounding (TSG) aims to locate a target moment semantically according to a sentence query. Although previous respectable works have made decent success, they only focus on high-level visual features extracted from the consecutive decoded frames and fail to handle the compressed videos for query modelling, suffering from insufficient representation capability and significant computational complexity during training and testing. In this paper, we pose a new setting, compressed-domain TSG, which directly utilizes compressed videos rather than fully-decompressed frames as the visual input. To handle the raw video bit-stream input, we propose a novel Three-branch Compressed-domain Spatial-temporal Fusion (TCSF) framework, which extracts and aggregates three kinds of low-level visual features (I-frame, motion vector and residual features) for effective and efficient grounding. Particularly, instead of encoding the whole decoded frames like previous works, we capture the appearance representation by only learning the I-frame feature to reduce delay or latency. Besides, we explore the motion information not only by learning the motion vector feature, but also by exploring the relations of neighboring frames via the residual feature. In this way, a three-branch spatial-temporal attention layer with an adaptive motion-appearance fusion module is further designed to extract and aggregate both appearance and motion information for the final grounding. Experiments on three challenging datasets shows that our TCSF achieves better performance than other state-of-the-art methods with lower complexity.
Practical Realization of Bessel's Correction for a Bias-Free Estimation of the Auto-Covariance and the Cross-Covariance Functions
Mar 20, 2023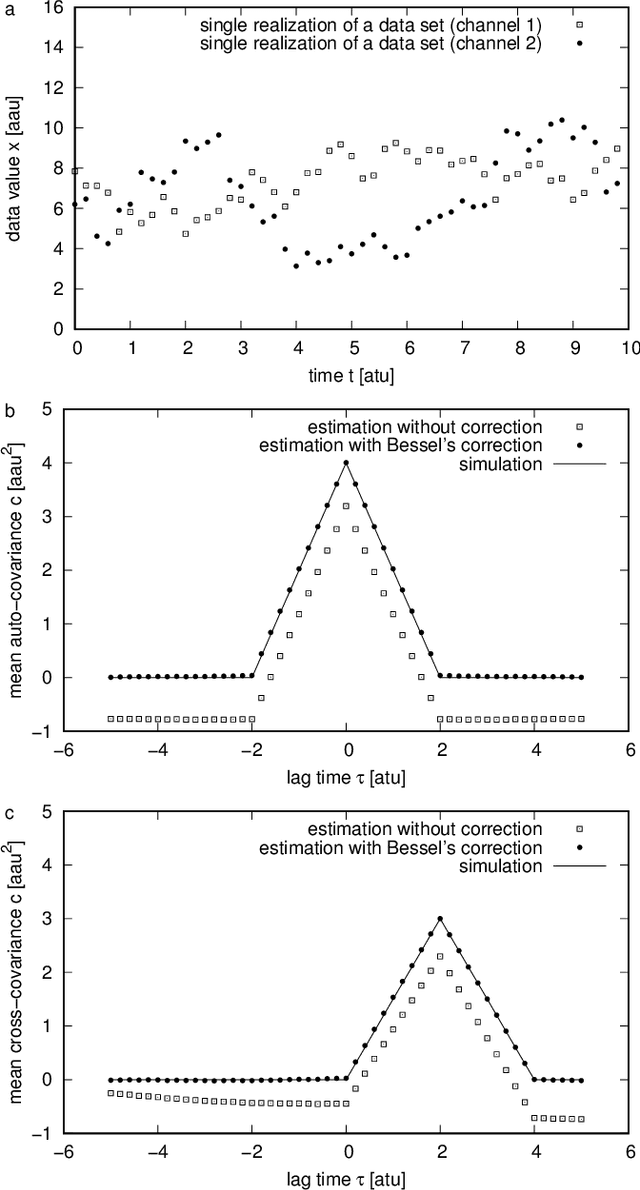
To derive the auto-covariance function from a sampled and time-limited signal or the cross-covariance function from two such signals, the mean values must be estimated and removed from the signals. If no a priori information about the correct mean values is available and the mean values must be derived from the time series themselves, the estimates will be biased. For the estimation of the variance from independent data the appropriate correction is widely known as Bessel's correction. Similar corrections for the auto-covariance and for the cross-covariance functions are shown here, including individual weighting of the samples. The corrected estimates then can be used to correct also the variance estimate in the case of correlated data. The programs used here are available online at http://sigproc.nambis.de/programs.
Contribution of clinical course to outcome after traumatic brain injury: mining patient trajectories from European intensive care unit data
Mar 08, 2023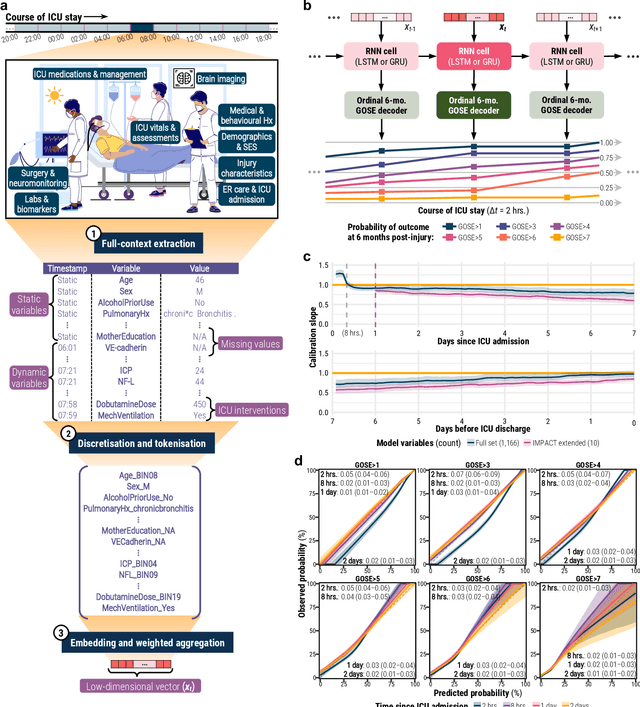
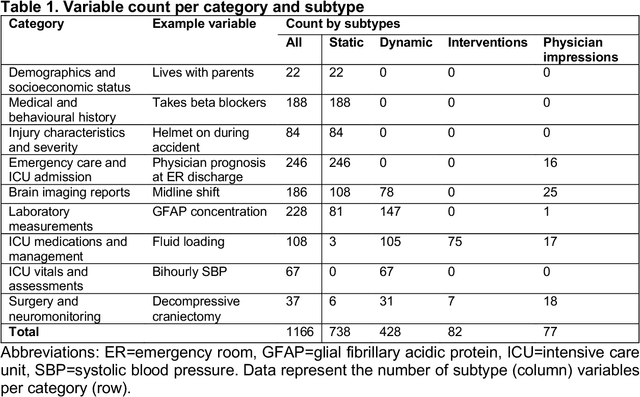
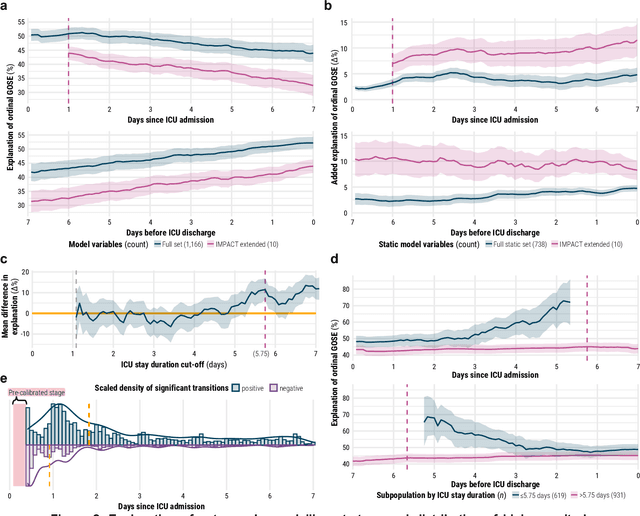
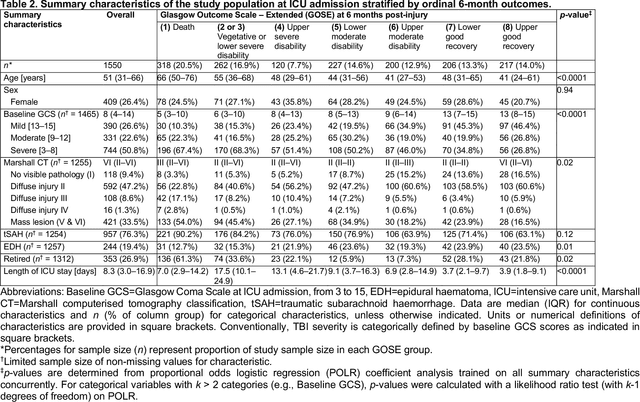
Existing methods to characterise the evolving condition of traumatic brain injury (TBI) patients in the intensive care unit (ICU) do not capture the context necessary for individualising treatment. We aimed to develop a modelling strategy which integrates all data stored in medical records to produce an interpretable disease course for each TBI patient's ICU stay. From a prospective, European cohort (n=1,550, 65 centres, 19 countries) of TBI patients, we extracted all 1,166 variables collected before or during ICU stay as well as 6-month functional outcome on the Glasgow Outcome Scale-Extended (GOSE). We trained recurrent neural network models to map a token-embedded time series representation of all variables (including missing data) to an ordinal GOSE prognosis every 2 hours. With repeated cross-validation, we evaluated calibration and the explanation of ordinal variance in GOSE with Somers' Dxy. Furthermore, we applied TimeSHAP to calculate the contribution of variables and prior timepoints towards transitions in patient trajectories. Our modelling strategy achieved calibration at 8 hours, and the full range of variables explained up to 52% (95% CI: 50-54%) of the variance in ordinal functional outcome. Up to 91% (90-91%) of this explanation was derived from pre-ICU and admission information. Information collected in the ICU increased explanation (by up to 5% [4-6%]), though not enough to counter poorer performance in longer-stay (>5.75 days) patients. Static variables with the highest contributions were physician prognoses and certain demographic and CT features. Among dynamic variables, markers of intracranial hypertension and neurological function contributed the most. Whilst static information currently accounts for the majority of functional outcome explanation, our data-driven analysis highlights investigative avenues to improve dynamic characterisation of longer-stay patients.