 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Learning A Sparse Transformer Network for Effective Image Deraining
Mar 21, 2023
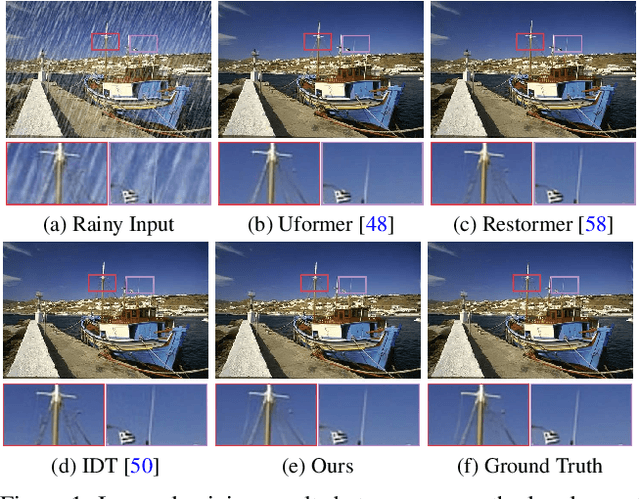
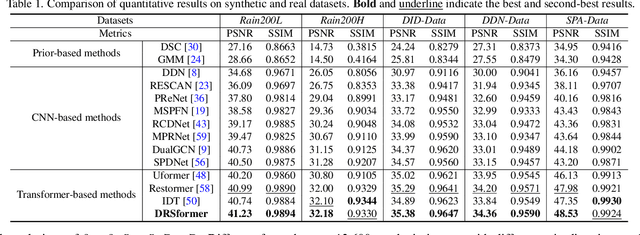
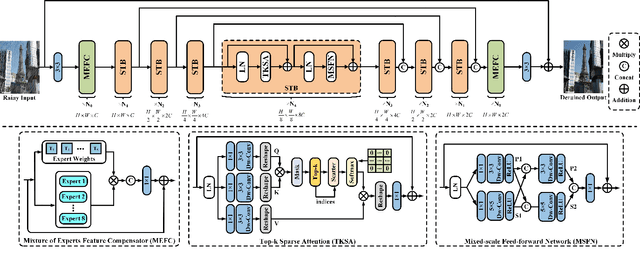
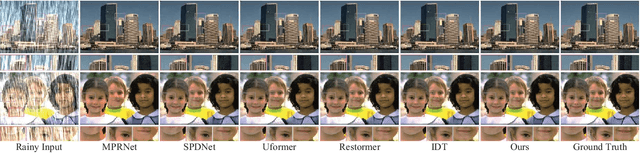
Transformers-based methods have achieved significant performance in image deraining as they can model the non-local information which is vital for high-quality image reconstruction. In this paper, we find that most existing Transformers usually use all similarities of the tokens from the query-key pairs for the feature aggregation. However, if the tokens from the query are different from those of the key, the self-attention values estimated from these tokens also involve in feature aggregation, which accordingly interferes with the clear image restoration. To overcome this problem, we propose an effective DeRaining network, Sparse Transformer (DRSformer) that can adaptively keep the most useful self-attention values for feature aggregation so that the aggregated features better facilitate high-quality image reconstruction. Specifically, we develop a learnable top-k selection operator to adaptively retain the most crucial attention scores from the keys for each query for better feature aggregation. Simultaneously, as the naive feed-forward network in Transformers does not model the multi-scale information that is important for latent clear image restoration, we develop an effective mixed-scale feed-forward network to generate better features for image deraining. To learn an enriched set of hybrid features, which combines local context from CNN operators, we equip our model with mixture of experts feature compensator to present a cooperation refinement deraining scheme. Extensive experimental results on the commonly used benchmarks demonstrate that the proposed method achieves favorable performance against state-of-the-art approaches. The source code and trained models are available at https://github.com/cschenxiang/DRSformer.
* Accepted as a highlight paper in CVPR 2023
Secure Aggregation in Federated Learning is not Private: Leaking User Data at Large Scale through Model Modification
Mar 21, 2023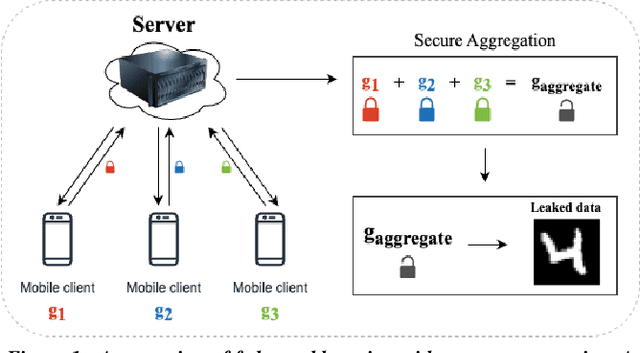
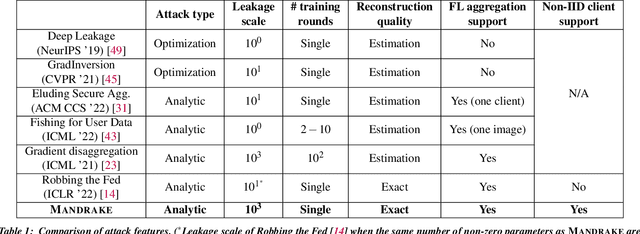
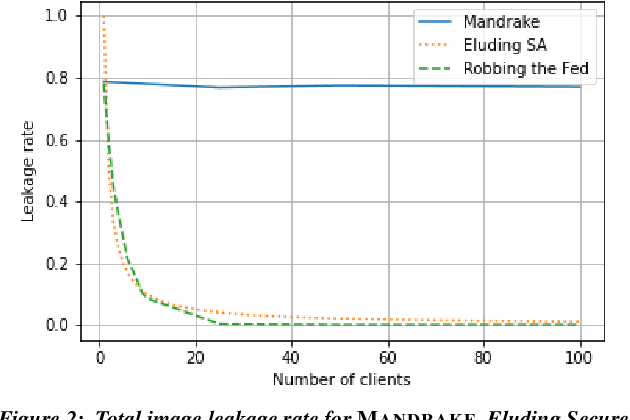
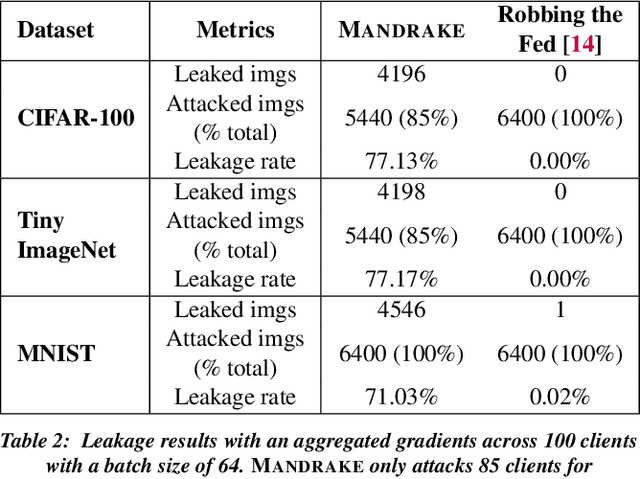
Security and privacy are important concerns in machine learning. End user devices often contain a wealth of data and this information is sensitive and should not be shared with servers or enterprises. As a result, federated learning was introduced to enable machine learning over large decentralized datasets while promising privacy by eliminating the need for data sharing. However, prior work has shown that shared gradients often contain private information and attackers can gain knowledge either through malicious modification of the architecture and parameters or by using optimization to approximate user data from the shared gradients. Despite this, most attacks have so far been limited in scale of number of clients, especially failing when client gradients are aggregated together using secure model aggregation. The attacks that still function are strongly limited in the number of clients attacked, amount of training samples they leak, or number of iterations they take to be trained. In this work, we introduce MANDRAKE, an attack that overcomes previous limitations to directly leak large amounts of client data even under secure aggregation across large numbers of clients. Furthermore, we break the anonymity of aggregation as the leaked data is identifiable and directly tied back to the clients they come from. We show that by sending clients customized convolutional parameters, the weight gradients of data points between clients will remain separate through aggregation. With an aggregation across many clients, prior work could only leak less than 1% of images. With the same number of non-zero parameters, and using only a single training iteration, MANDRAKE leaks 70-80% of data samples.
LogoNet: a fine-grained network for instance-level logo sketch retrieval
Apr 05, 2023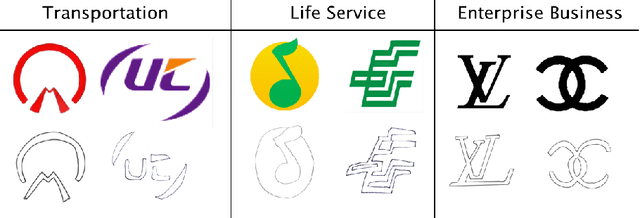

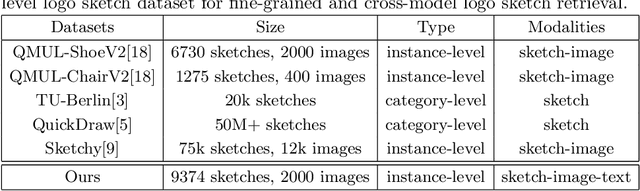
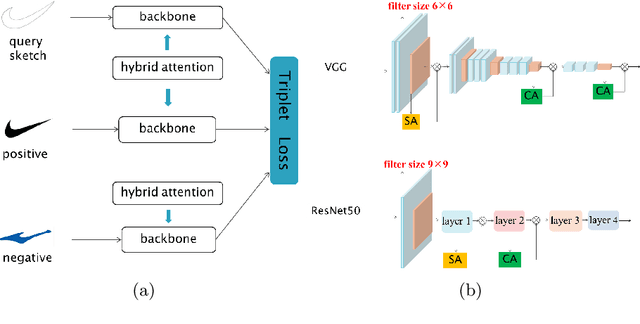
Sketch-based image retrieval, which aims to use sketches as queries to retrieve images containing the same query instance, receives increasing attention in recent years. Although dramatic progress has been made in sketch retrieval, few efforts are devoted to logo sketch retrieval which is still hindered by the following challenges: Firstly, logo sketch retrieval is more difficult than typical sketch retrieval problem, since a logo sketch usually contains much less visual contents with only irregular strokes and lines. Secondly, instance-specific sketches demonstrate dramatic appearance variances, making them less identifiable when querying the same logo instance. Thirdly, there exist several sketch retrieval benchmarking datasets nowadays, whereas an instance-level logo sketch dataset is still publicly unavailable. To address the above-mentioned limitations, we make twofold contributions in this study for instance-level logo sketch retrieval. To begin with, we construct an instance-level logo sketch dataset containing 2k logo instances and exceeding 9k sketches. To our knowledge, this is the first publicly available instance-level logo sketch dataset. Next, we develop a fine-grained triple-branch CNN architecture based on hybrid attention mechanism termed LogoNet for accurate logo sketch retrieval. More specifically, we embed the hybrid attention mechanism into the triple-branch architecture for capturing the key query-specific information from the limited visual cues in the logo sketches. Experimental evaluations both on our assembled dataset and public benchmark datasets demonstrate the effectiveness of our proposed network.
Sequential edge detection using joint hierarchical Bayesian learning
Feb 28, 2023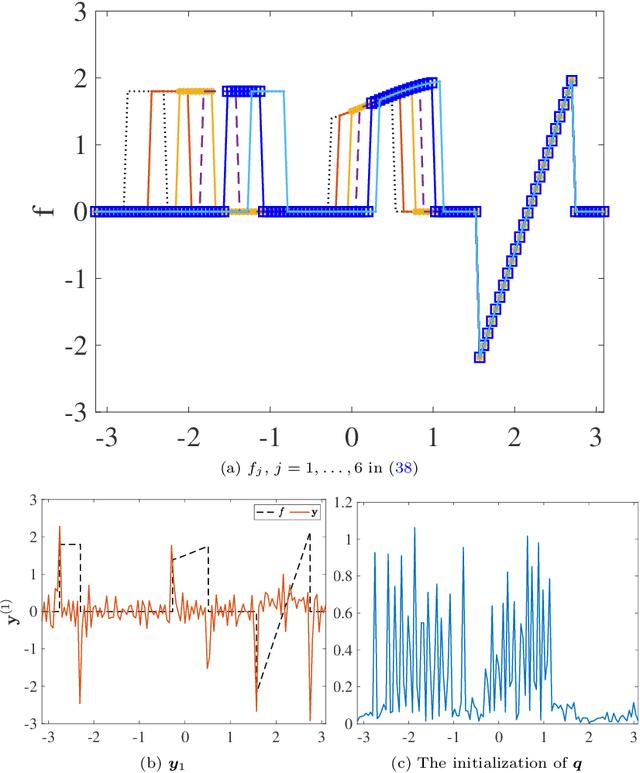
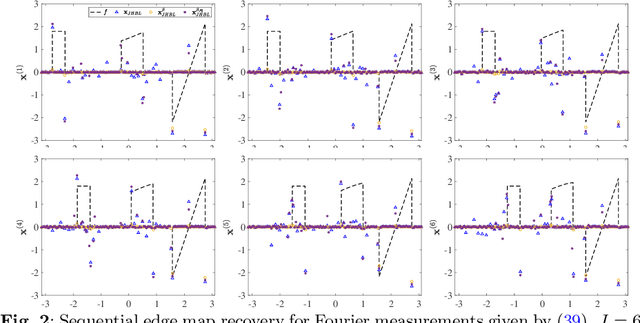
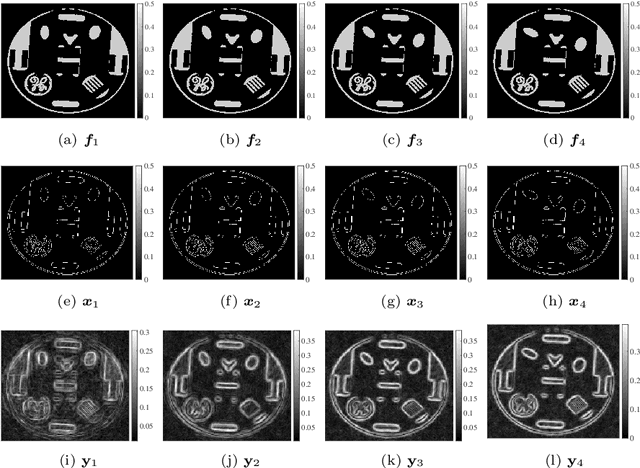
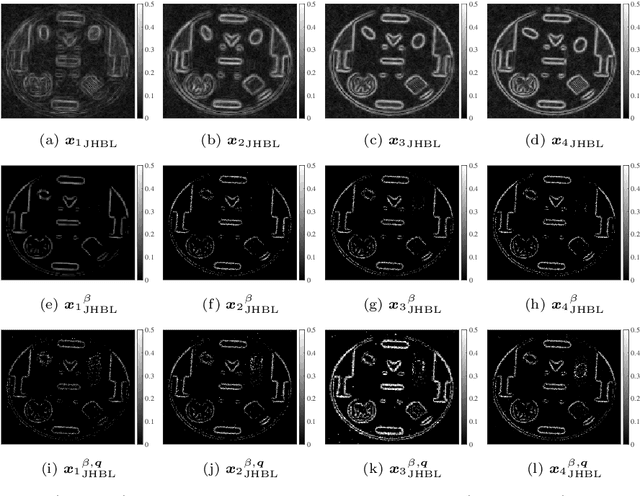
This paper introduces a new sparse Bayesian learning (SBL) algorithm that jointly recovers a temporal sequence of edge maps from noisy and under-sampled Fourier data. The new method is cast in a Bayesian framework and uses a prior that simultaneously incorporates intra-image information to promote sparsity in each individual edge map with inter-image information to promote similarities in any unchanged regions. By treating both the edges as well as the similarity between adjacent images as random variables, there is no need to separately form regions of change. Thus we avoid both additional computational cost as well as any information loss resulting from pre-processing the image. Our numerical examples demonstrate that our new method compares favorably with more standard SBL approaches.
Traj-MAE: Masked Autoencoders for Trajectory Prediction
Mar 12, 2023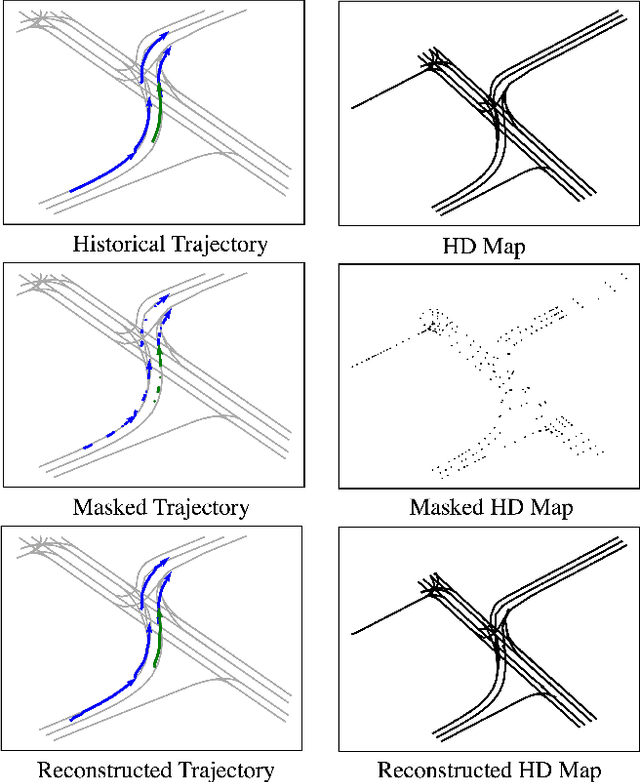
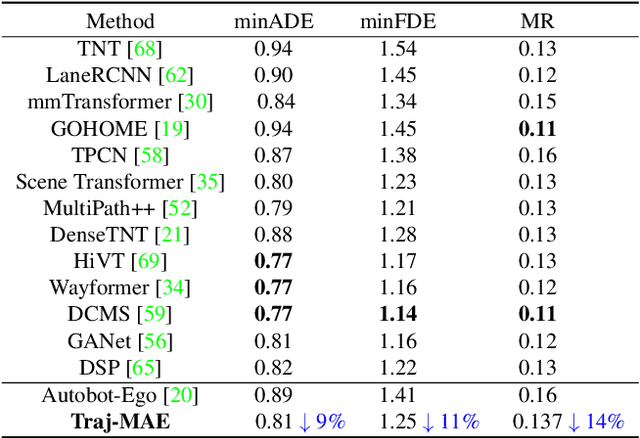

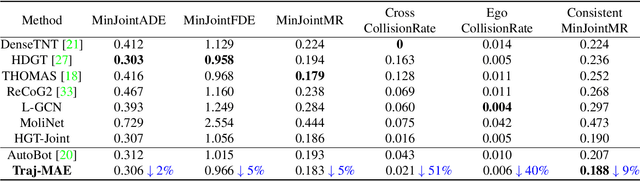
Trajectory prediction has been a crucial task in building a reliable autonomous driving system by anticipating possible dangers. One key issue is to generate consistent trajectory predictions without colliding. To overcome the challenge, we propose an efficient masked autoencoder for trajectory prediction (Traj-MAE) that better represents the complicated behaviors of agents in the driving environment. Specifically, our Traj-MAE employs diverse masking strategies to pre-train the trajectory encoder and map encoder, allowing for the capture of social and temporal information among agents while leveraging the effect of environment from multiple granularities. To address the catastrophic forgetting problem that arises when pre-training the network with multiple masking strategies, we introduce a continual pre-training framework, which can help Traj-MAE learn valuable and diverse information from various strategies efficiently. Our experimental results in both multi-agent and single-agent settings demonstrate that Traj-MAE achieves competitive results with state-of-the-art methods and significantly outperforms our baseline model.
Accommodating Audio Modality in CLIP for Multimodal Processing
Mar 12, 2023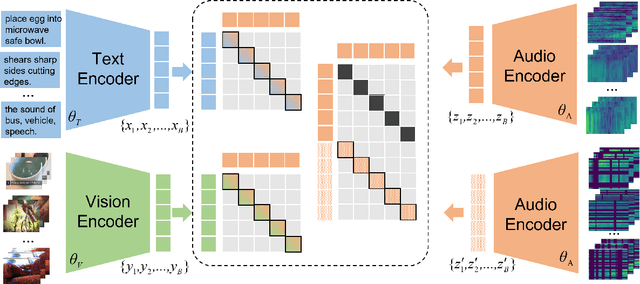
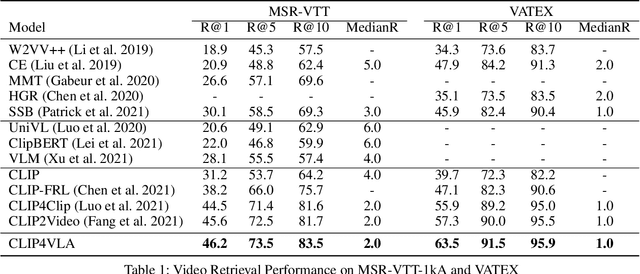

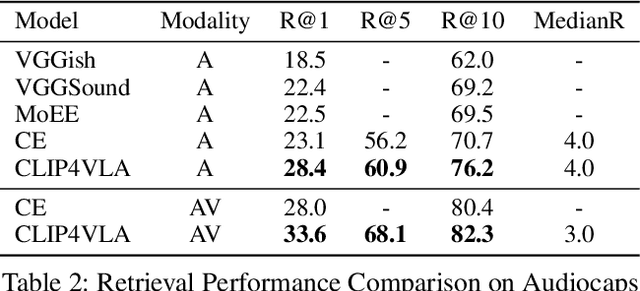
Multimodal processing has attracted much attention lately especially with the success of pre-training. However, the exploration has mainly focused on vision-language pre-training, as introducing more modalities can greatly complicate model design and optimization. In this paper, we extend the stateof-the-art Vision-Language model CLIP to accommodate the audio modality for Vision-Language-Audio multimodal processing. Specifically, we apply inter-modal and intra-modal contrastive learning to explore the correlation between audio and other modalities in addition to the inner characteristics of the audio modality. Moreover, we further design an audio type token to dynamically learn different audio information type for different scenarios, as both verbal and nonverbal heterogeneous information is conveyed in general audios. Our proposed CLIP4VLA model is validated in different downstream tasks including video retrieval and video captioning, and achieves the state-of-the-art performance on the benchmark datasets of MSR-VTT, VATEX, and Audiocaps.
Multi-Fidelity Bayesian Optimization with Unreliable Information Sources
Oct 25, 2022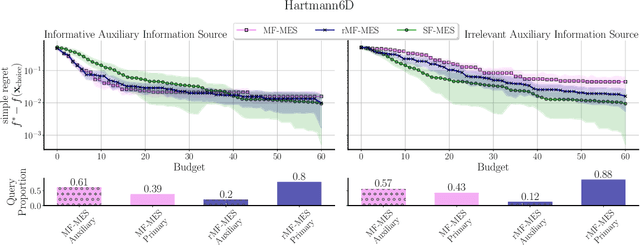

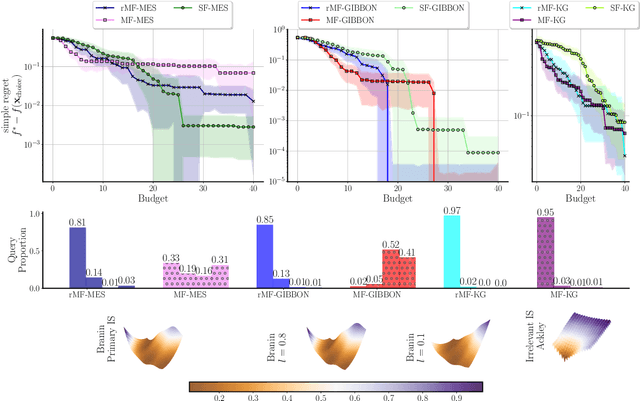
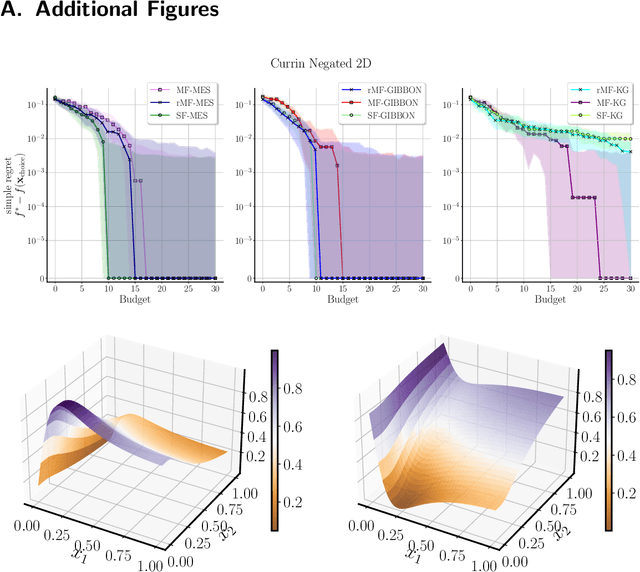
Bayesian optimization (BO) is a powerful framework for optimizing black-box, expensive-to-evaluate functions. Over the past decade, many algorithms have been proposed to integrate cheaper, lower-fidelity approximations of the objective function into the optimization process, with the goal of converging towards the global optimum at a reduced cost. This task is generally referred to as multi-fidelity Bayesian optimization (MFBO). However, MFBO algorithms can lead to higher optimization costs than their vanilla BO counterparts, especially when the low-fidelity sources are poor approximations of the objective function, therefore defeating their purpose. To address this issue, we propose rMFBO (robust MFBO), a methodology to make any GP-based MFBO scheme robust to the addition of unreliable information sources. rMFBO comes with a theoretical guarantee that its performance can be bound to its vanilla BO analog, with high controllable probability. We demonstrate the effectiveness of the proposed methodology on a number of numerical benchmarks, outperforming earlier MFBO methods on unreliable sources. We expect rMFBO to be particularly useful to reliably include human experts with varying knowledge within BO processes.
Krylov Methods are (nearly) Optimal for Low-Rank Approximation
Apr 06, 2023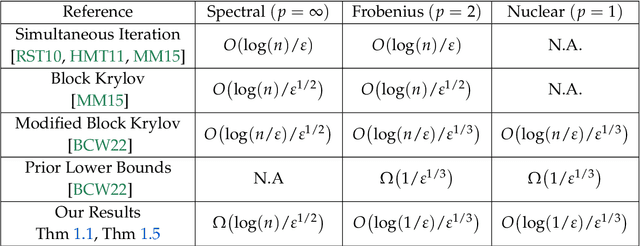
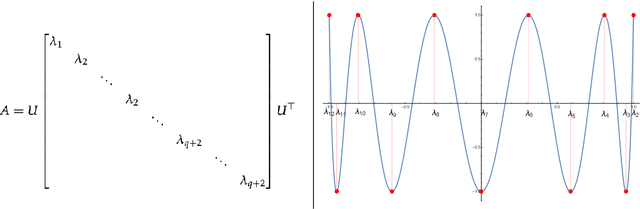
We consider the problem of rank-$1$ low-rank approximation (LRA) in the matrix-vector product model under various Schatten norms: $$ \min_{\|u\|_2=1} \|A (I - u u^\top)\|_{\mathcal{S}_p} , $$ where $\|M\|_{\mathcal{S}_p}$ denotes the $\ell_p$ norm of the singular values of $M$. Given $\varepsilon>0$, our goal is to output a unit vector $v$ such that $$ \|A(I - vv^\top)\|_{\mathcal{S}_p} \leq (1+\varepsilon) \min_{\|u\|_2=1}\|A(I - u u^\top)\|_{\mathcal{S}_p}. $$ Our main result shows that Krylov methods (nearly) achieve the information-theoretically optimal number of matrix-vector products for Spectral ($p=\infty$), Frobenius ($p=2$) and Nuclear ($p=1$) LRA. In particular, for Spectral LRA, we show that any algorithm requires $\Omega\left(\log(n)/\varepsilon^{1/2}\right)$ matrix-vector products, exactly matching the upper bound obtained by Krylov methods [MM15, BCW22]. Our lower bound addresses Open Question 1 in [Woo14], providing evidence for the lack of progress on algorithms for Spectral LRA and resolves Open Question 1.2 in [BCW22]. Next, we show that for any fixed constant $p$, i.e. $1\leq p =O(1)$, there is an upper bound of $O\left(\log(1/\varepsilon)/\varepsilon^{1/3}\right)$ matrix-vector products, implying that the complexity does not grow as a function of input size. This improves the $O\left(\log(n/\varepsilon)/\varepsilon^{1/3}\right)$ bound recently obtained in [BCW22], and matches their $\Omega\left(1/\varepsilon^{1/3}\right)$ lower bound, to a $\log(1/\varepsilon)$ factor.
Group Testing with Side Information via Generalized Approximate Message Passing
Nov 07, 2022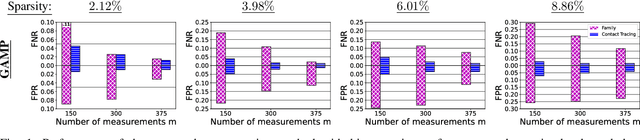
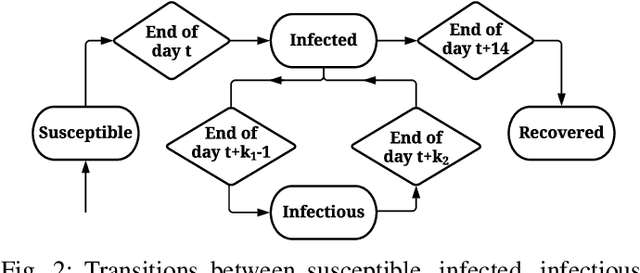
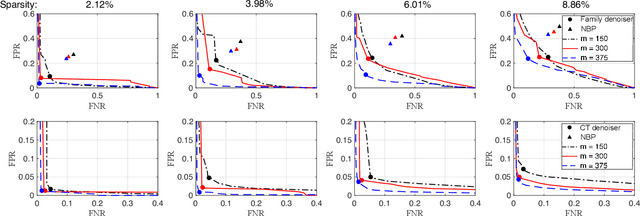
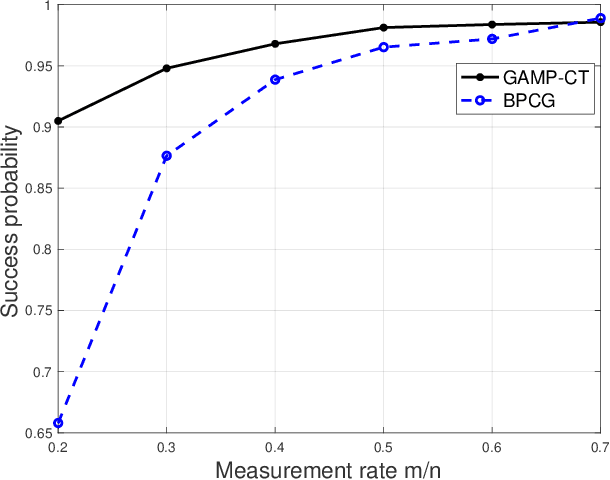
Group testing can help maintain a widespread testing program using fewer resources amid a pandemic. In a group testing setup, we are given n samples, one per individual. Each individual is either infected or uninfected. These samples are arranged into m < n pooled samples, where each pool is obtained by mixing a subset of the n individual samples. Infected individuals are then identified using a group testing algorithm. In this paper, we incorporate side information (SI) collected from contact tracing (CT) into nonadaptive/single-stage group testing algorithms. We generate different types of possible CT SI data by incorporating different possible characteristics of the spread of the disease. These data are fed into a group testing framework based on generalized approximate message passing (GAMP). Numerical results show that our GAMP-based algorithms provide improved accuracy. Compared to a loopy belief propagation algorithm, our proposed framework can increase the success probability by 0.25 for a group testing problem of n = 500 individuals with m = 100 pooled samples.
coExplore: Combining multiple rankings for multi-robot exploration
Mar 30, 2023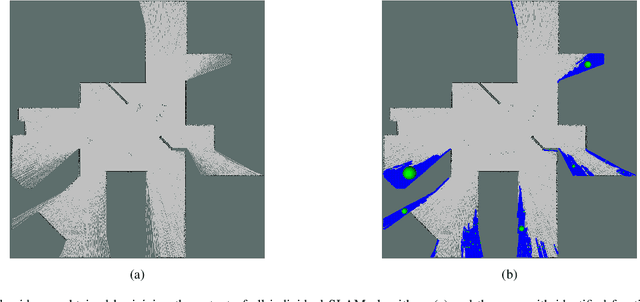
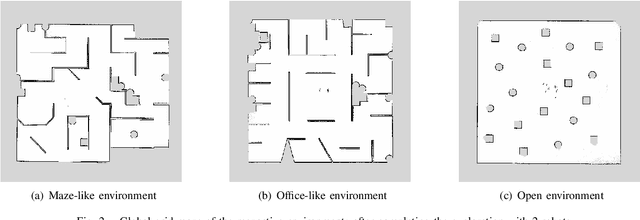
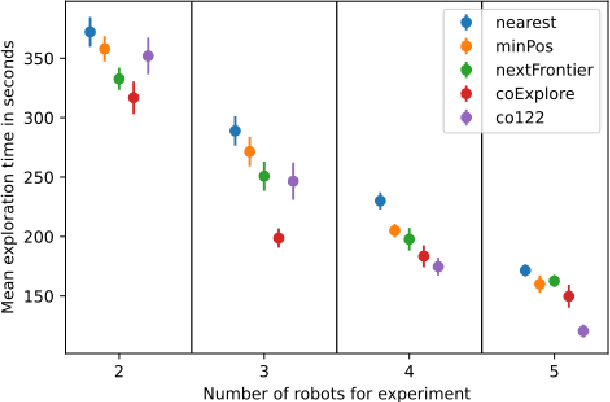
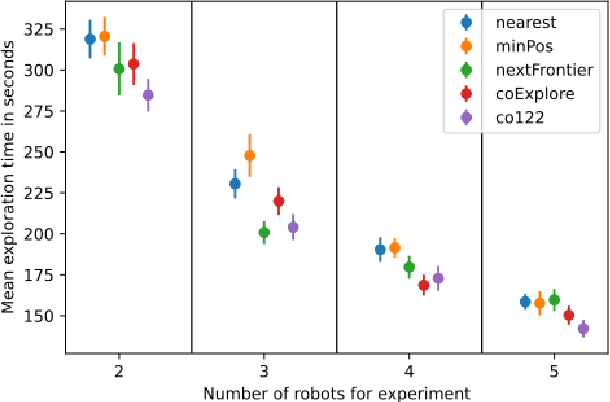
Multi-robot exploration is a field which tackles the challenge of exploring a previously unknown environment with a number of robots. This is especially relevant for search and rescue operations where time is essential. Current state of the art approaches are able to explore a given environment with a large number of robots by assigning them to frontiers. However, this assignment generally favors large frontiers and hence omits potentially valuable medium-sized frontiers. In this paper we showcase a novel multi-robot exploration algorithm, which improves and adapts the existing approaches. Through the addition of information gain based ranking we improve the exploration time for closed urban environments while maintaining similar exploration performance compared to the state-of-the-art for open environments. Accompanying this paper, we further publish our research code in order to lower the barrier to entry for further multi-robot exploration research. We evaluate the performance in three simulated scenarios, two urban and one open scenario, where our algorithm outperforms the state of the art by 5\% overall.