 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Active View Planning for Visual SLAM in Outdoor Environments Based on Continuous Information Modeling
Nov 12, 2022
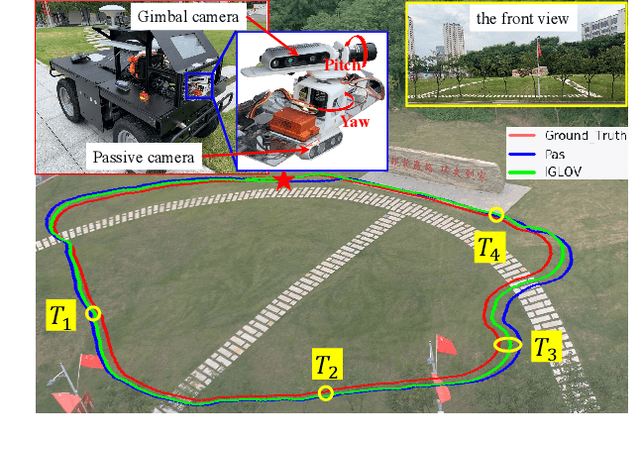
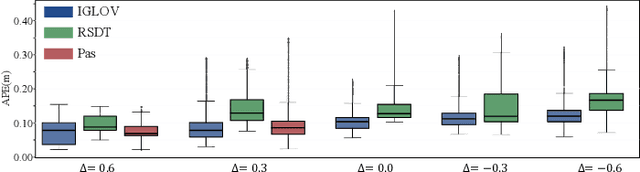
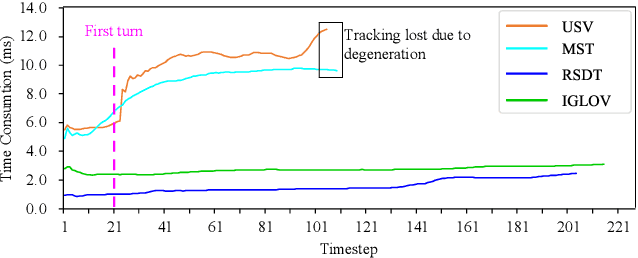
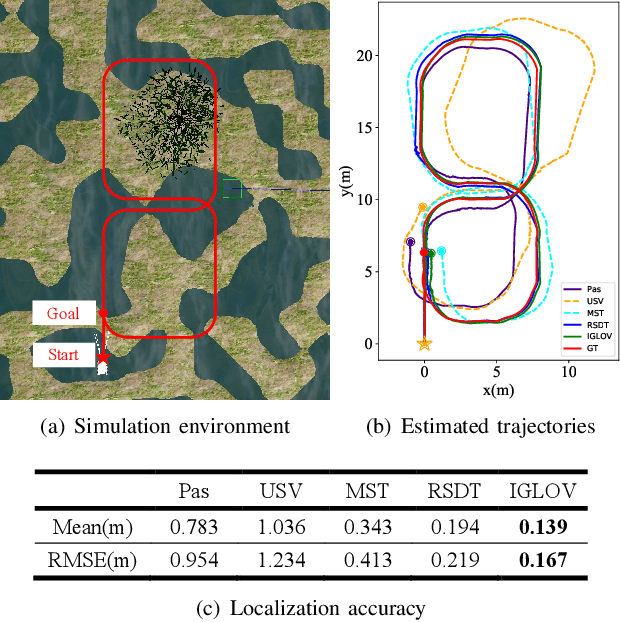
The visual simultaneous localization and mapping(vSLAM) is widely used in GPS-denied and open field environments for ground and surface robots. However, due to the frequent perception failures derived from lacking visual texture or the {swing} of robot view direction on rough terrains, the accuracy and robustness of vSLAM are still to be enhanced. The study develops a novel view planning approach of actively perceiving areas with maximal information to address the mentioned problem; a gimbal camera is used as the main sensor. Firstly, a map representation based on feature distribution-weighted Fisher information is proposed to completely and effectively represent environmental information richness. With the map representation, a continuous environmental information model is further established to convert the discrete information space into a continuous one for numerical optimization in real-time. Subsequently, the receding horizon optimization is utilized to obtain the optimal informative viewpoints with simultaneously considering the robotic perception, exploration and motion cost based on the continuous environmental model. Finally, several simulations and outdoor experiments are performed to verify the improvement of localization robustness and accuracy by the proposed approach.
SAM Fails to Segment Anything? -- SAM-Adapter: Adapting SAM in Underperformed Scenes: Camouflage, Shadow, and More
Apr 19, 2023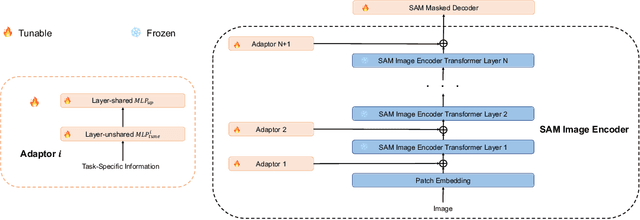
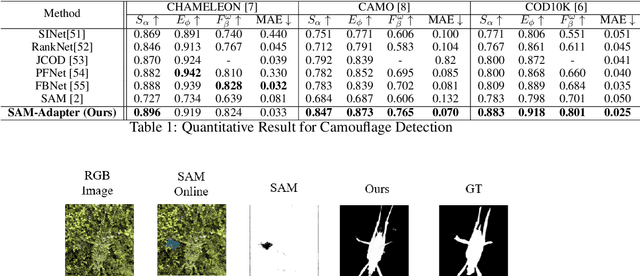
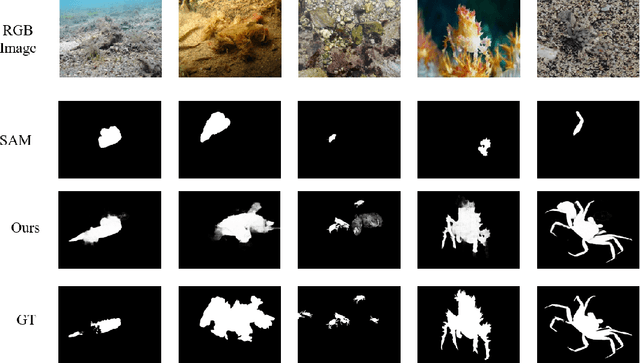
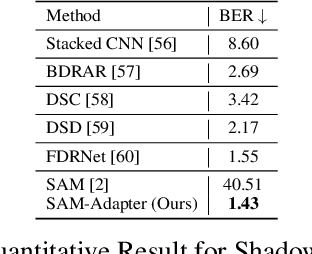
The emergence of large models, also known as foundation models, has brought significant advancements to AI research. One such model is Segment Anything (SAM), which is designed for image segmentation tasks. However, as with other foundation models, our experimental findings suggest that SAM may fail or perform poorly in certain segmentation tasks, such as shadow detection and camouflaged object detection (concealed object detection). This study first paves the way for applying the large pre-trained image segmentation model SAM to these downstream tasks, even in situations where SAM performs poorly. Rather than fine-tuning the SAM network, we propose \textbf{SAM-Adapter}, which incorporates domain-specific information or visual prompts into the segmentation network by using simple yet effective adapters. Our extensive experiments show that SAM-Adapter can significantly elevate the performance of SAM in challenging tasks and we can even outperform task-specific network models and achieve state-of-the-art performance in the task we tested: camouflaged object detection and shadow detection. We believe our work opens up opportunities for utilizing SAM in downstream tasks, with potential applications in various fields, including medical image processing, agriculture, remote sensing, and more.
GeneGPT: Teaching Large Language Models to Use NCBI Web APIs
Apr 19, 2023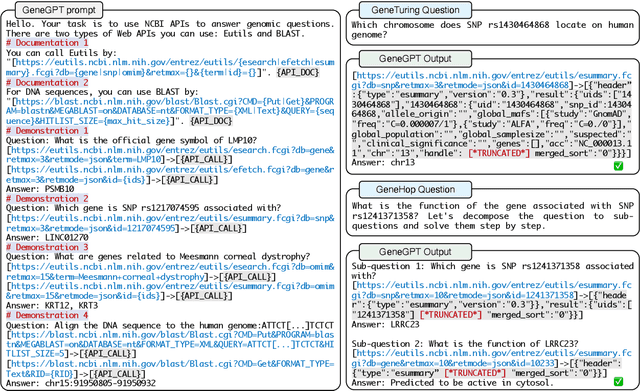
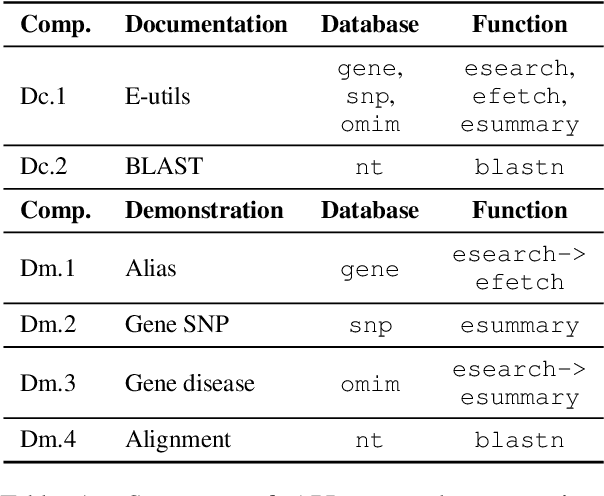
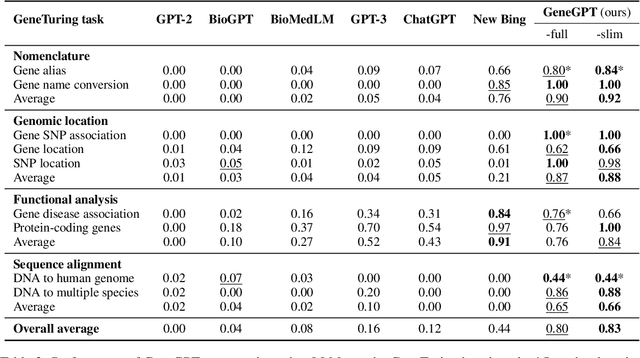
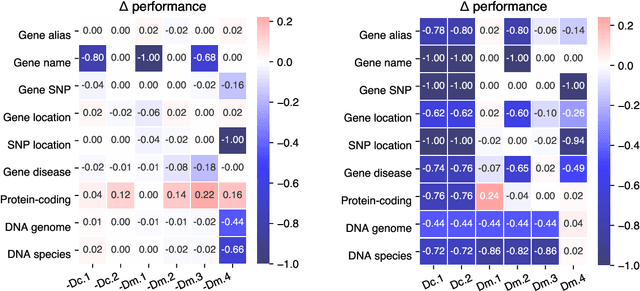
In this paper, we present GeneGPT, a novel method for teaching large language models (LLMs) to use the Web Application Programming Interfaces (APIs) of the National Center for Biotechnology Information (NCBI) and answer genomics questions. Specifically, we prompt Codex (code-davinci-002) to solve the GeneTuring tests with few-shot URL requests of NCBI API calls as demonstrations for in-context learning. During inference, we stop the decoding once a call request is detected and make the API call with the generated URL. We then append the raw execution results returned by NCBI APIs to the generated texts and continue the generation until the answer is found or another API call is detected. Our preliminary results show that GeneGPT achieves state-of-the-art results on three out of four one-shot tasks and four out of five zero-shot tasks in the GeneTuring dataset. Overall, GeneGPT achieves a macro-average score of 0.76, which is much higher than retrieval-augmented LLMs such as the New Bing (0.44), biomedical LLMs such as BioMedLM (0.08) and BioGPT (0.04), as well as other LLMs such as GPT-3 (0.16) and ChatGPT (0.12).
Evaluating Verifiability in Generative Search Engines
Apr 19, 2023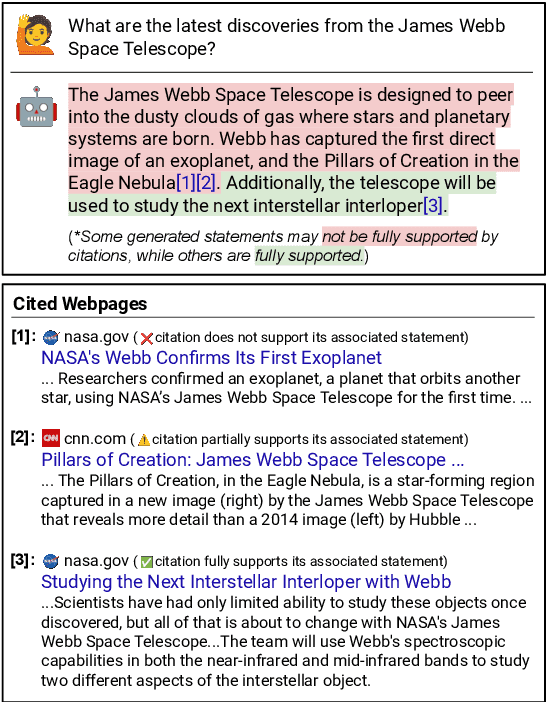
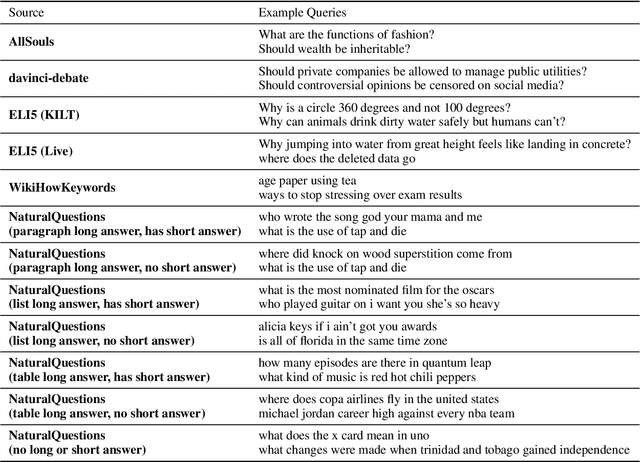
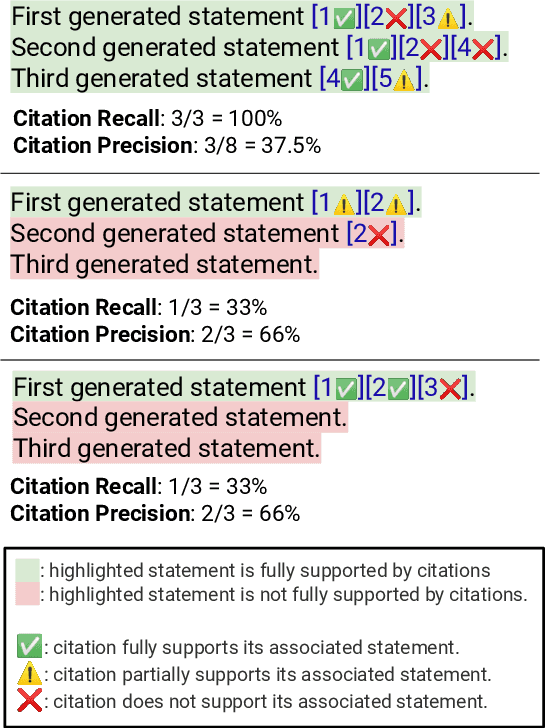
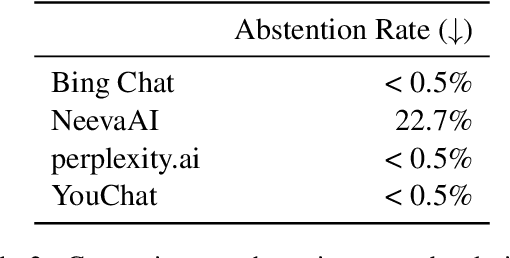
Generative search engines directly generate responses to user queries, along with in-line citations. A prerequisite trait of a trustworthy generative search engine is verifiability, i.e., systems should cite comprehensively (high citation recall; all statements are fully supported by citations) and accurately (high citation precision; every cite supports its associated statement). We conduct human evaluation to audit four popular generative search engines -- Bing Chat, NeevaAI, perplexity.ai, and YouChat -- across a diverse set of queries from a variety of sources (e.g., historical Google user queries, dynamically-collected open-ended questions on Reddit, etc.). We find that responses from existing generative search engines are fluent and appear informative, but frequently contain unsupported statements and inaccurate citations: on average, a mere 51.5% of generated sentences are fully supported by citations and only 74.5% of citations support their associated sentence. We believe that these results are concerningly low for systems that may serve as a primary tool for information-seeking users, especially given their facade of trustworthiness. We hope that our results further motivate the development of trustworthy generative search engines and help researchers and users better understand the shortcomings of existing commercial systems.
An Offline Metric for the Debiasedness of Click Models
Apr 19, 2023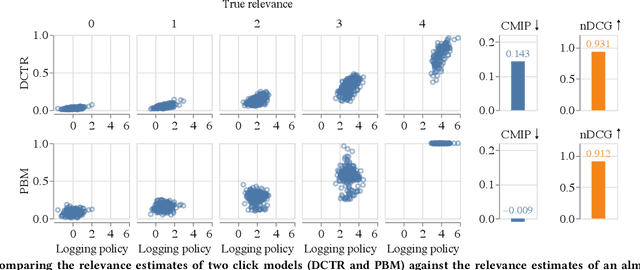
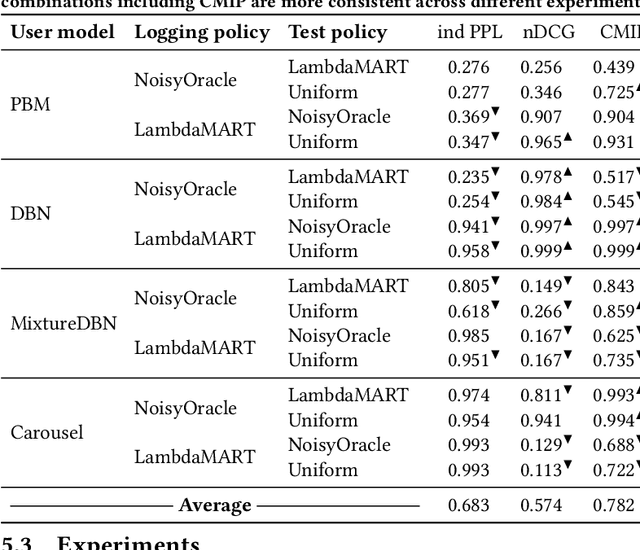
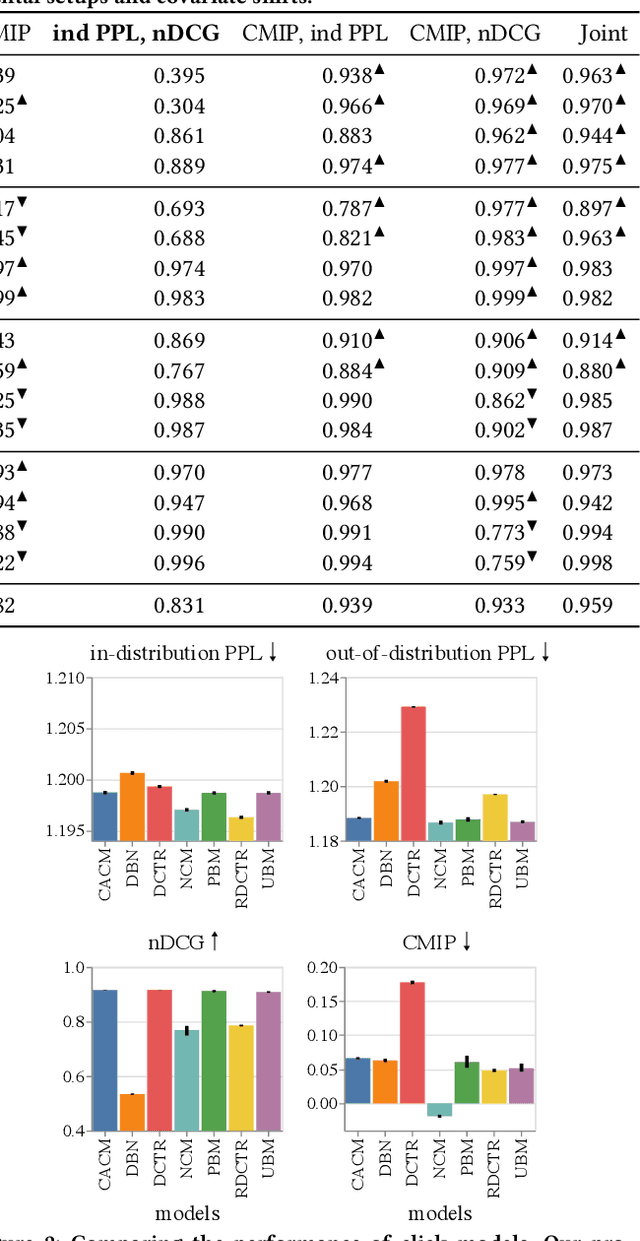
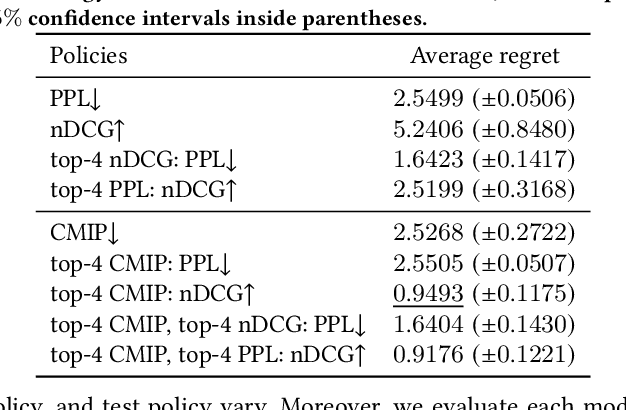
A well-known problem when learning from user clicks are inherent biases prevalent in the data, such as position or trust bias. Click models are a common method for extracting information from user clicks, such as document relevance in web search, or to estimate click biases for downstream applications such as counterfactual learning-to-rank, ad placement, or fair ranking. Recent work shows that the current evaluation practices in the community fail to guarantee that a well-performing click model generalizes well to downstream tasks in which the ranking distribution differs from the training distribution, i.e., under covariate shift. In this work, we propose an evaluation metric based on conditional independence testing to detect a lack of robustness to covariate shift in click models. We introduce the concept of debiasedness and a metric for measuring it. We prove that debiasedness is a necessary condition for recovering unbiased and consistent relevance scores and for the invariance of click prediction under covariate shift. In extensive semi-synthetic experiments, we show that our proposed metric helps to predict the downstream performance of click models under covariate shift and is useful in an off-policy model selection setting.
Introducing Construct Theory as a Standard Methodology for Inclusive AI Models
Apr 19, 2023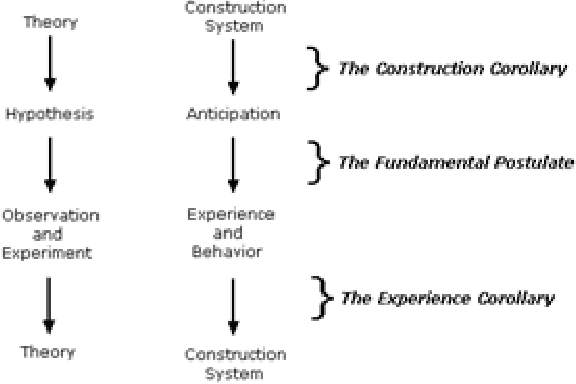

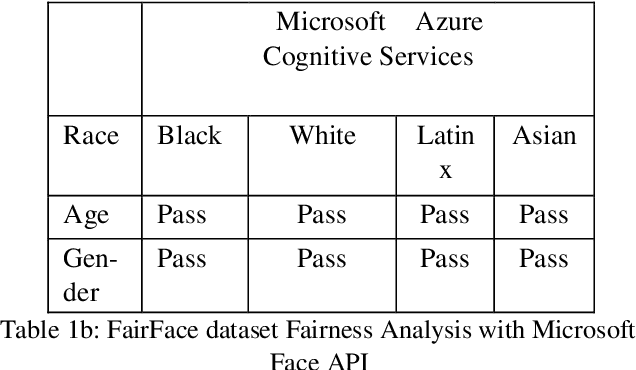
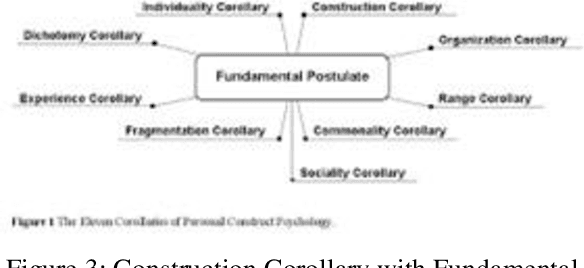
Construct theory in social psychology, developed by George Kelly are mental constructs to predict and anticipate events. Constructs are how humans interpret, curate, predict and validate data; information. AI today is biased because it is trained with a narrow construct as defined by the training data labels. Machine Learning algorithms for facial recognition discriminate against darker skin colors and in the ground breaking research papers (Buolamwini, Joy and Timnit Gebru. Gender Shades: Intersectional Accuracy Disparities in Commercial Gender Classification. FAT (2018), the inclusion of phenotypic labeling is proposed as a viable solution. In Construct theory, phenotype is just one of the many subelements that make up the construct of a face. In this paper, we present 15 main elements of the construct of face, with 50 subelements and tested Google Cloud Vision API and Microsoft Cognitive Services API using FairFace dataset that currently has data for 7 races, genders and ages, and we retested against FairFace Plus dataset curated by us. Our results show exactly where they have gaps for inclusivity. Based on our experiment results, we propose that validated, inclusive constructs become industry standards for AI ML models going forward.
ASM: Adaptive Skinning Model for High-Quality 3D Face Modeling
Apr 19, 2023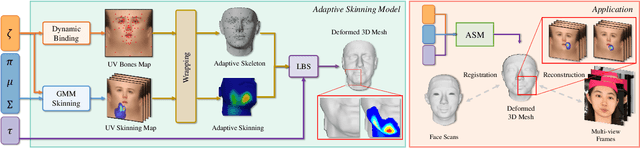
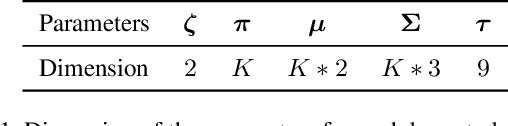
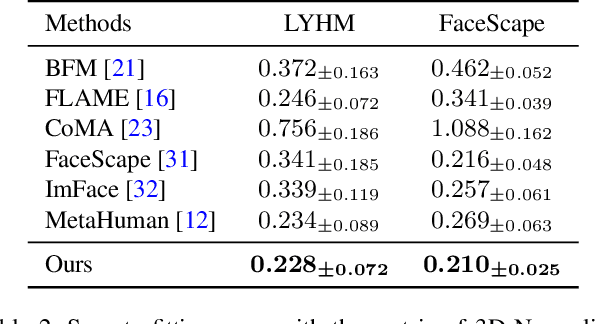
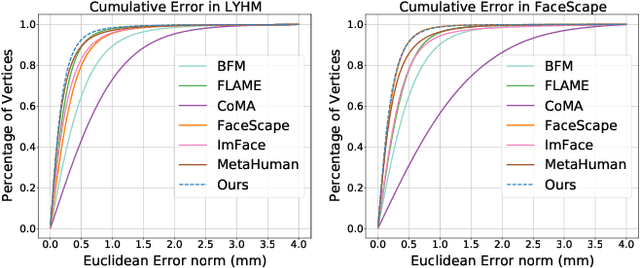
The research fields of parametric face models and 3D face reconstruction have been extensively studied. However, a critical question remains unanswered: how to tailor the face model for specific reconstruction settings. We argue that reconstruction with multi-view uncalibrated images demands a new model with stronger capacity. Our study shifts attention from data-dependent 3D Morphable Models (3DMM) to an understudied human-designed skinning model. We propose Adaptive Skinning Model (ASM), which redefines the skinning model with more compact and fully tunable parameters. With extensive experiments, we demonstrate that ASM achieves significantly improved capacity than 3DMM, with the additional advantage of model size and easy implementation for new topology. We achieve state-of-the-art performance with ASM for multi-view reconstruction on the Florence MICC Coop benchmark. Our quantitative analysis demonstrates the importance of a high-capacity model for fully exploiting abundant information from multi-view input in reconstruction. Furthermore, our model with physical-semantic parameters can be directly utilized for real-world applications, such as in-game avatar creation. As a result, our work opens up new research directions for the parametric face models and facilitates future research on multi-view reconstruction.
MvCo-DoT:Multi-View Contrastive Domain Transfer Network for Medical Report Generation
Apr 15, 2023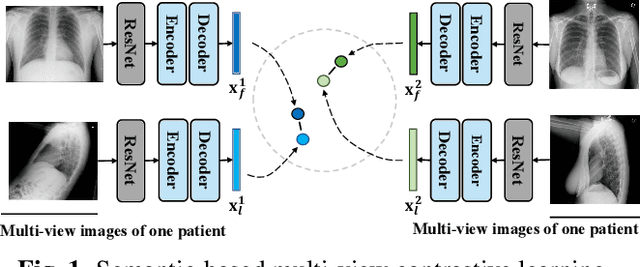
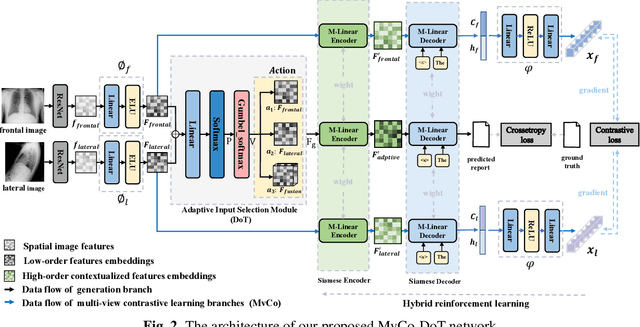
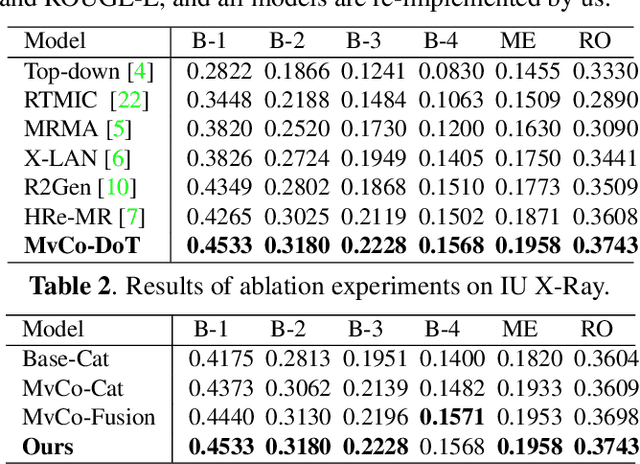
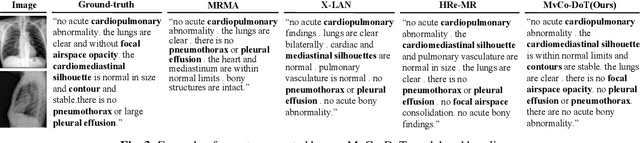
In clinical scenarios, multiple medical images with different views are usually generated at the same time, and they have high semantic consistency. However, the existing medical report generation methods cannot exploit the rich multi-view mutual information of medical images. Therefore, in this work, we propose the first multi-view medical report generation model, called MvCo-DoT. Specifically, MvCo-DoT first propose a multi-view contrastive learning (MvCo) strategy to help the deep reinforcement learning based model utilize the consistency of multi-view inputs for better model learning. Then, to close the performance gaps of using multi-view and single-view inputs, a domain transfer network is further proposed to ensure MvCo-DoT achieve almost the same performance as multi-view inputs using only single-view inputs.Extensive experiments on the IU X-Ray public dataset show that MvCo-DoT outperforms the SOTA medical report generation baselines in all metrics.
Causal Semantic Communication for Digital Twins: A Generalizable Imitation Learning Approach
Apr 25, 2023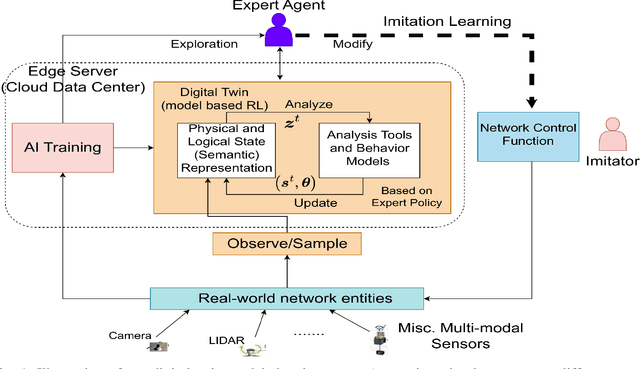
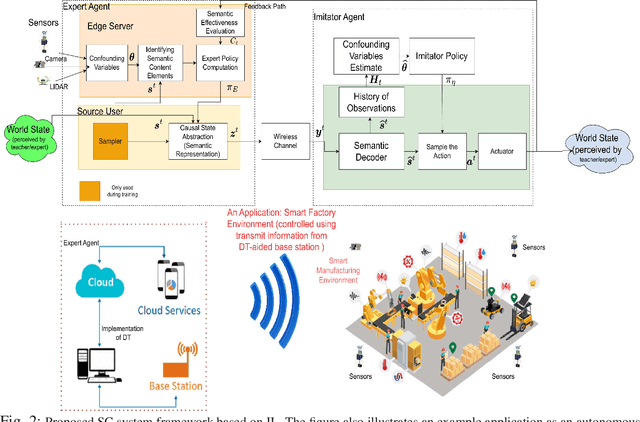
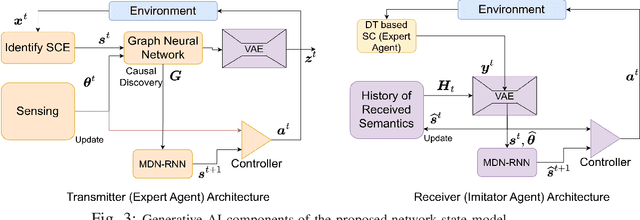
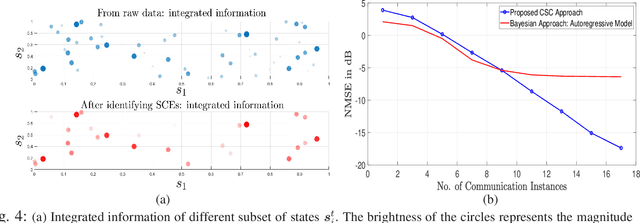
A digital twin (DT) leverages a virtual representation of the physical world, along with communication (e.g., 6G), computing (e.g., edge computing), and artificial intelligence (AI) technologies to enable many connected intelligence services. In order to handle the large amounts of network data based on digital twins (DTs), wireless systems can exploit the paradigm of semantic communication (SC) for facilitating informed decision-making under strict communication constraints by utilizing AI techniques such as causal reasoning. In this paper, a novel framework called causal semantic communication (CSC) is proposed for DT-based wireless systems. The CSC system is posed as an imitation learning (IL) problem, where the transmitter, with access to optimal network control policies using a DT, teaches the receiver using SC over a bandwidth limited wireless channel how to improve its knowledge to perform optimal control actions. The causal structure in the source data is extracted using novel approaches from the framework of deep end-to-end causal inference, thereby enabling the creation of a semantic representation that is causally invariant, which in turn helps generalize the learned knowledge of the system to unseen scenarios. The CSC decoder at the receiver is designed to extract and estimate semantic information while ensuring high semantic reliability. The receiver control policies, semantic decoder, and causal inference are formulated as a bi-level optimization problem within a variational inference framework. This problem is solved using a novel concept called network state models, inspired from world models in generative AI, that faithfully represents the environment dynamics leading to data generation. Simulation results demonstrate that the proposed CSC system outperforms state-of-the-art SC systems by achieving better semantic reliability and reduced semantic representation.
On the Generalization of Learned Structured Representations
Apr 25, 2023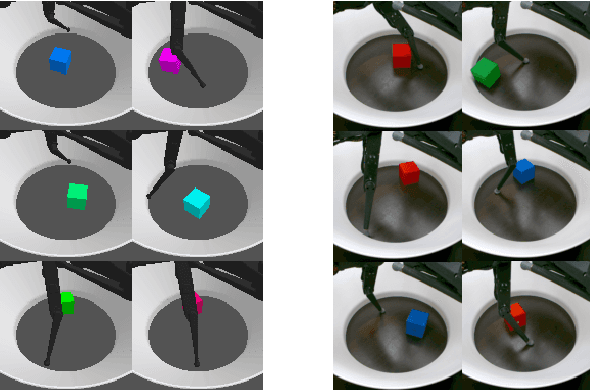
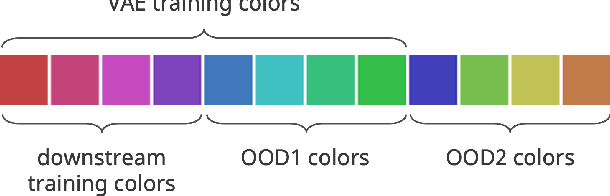
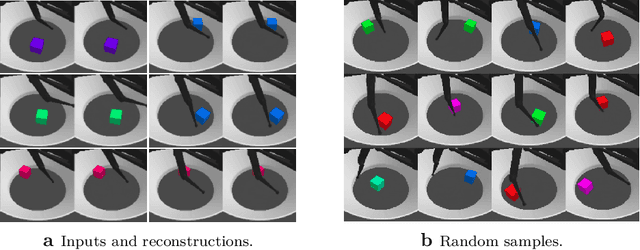
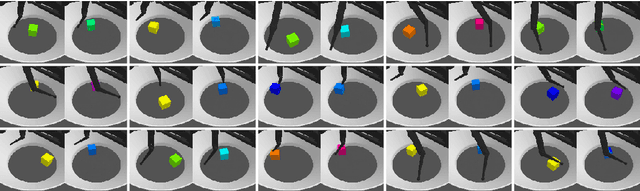
Despite tremendous progress over the past decade, deep learning methods generally fall short of human-level systematic generalization. It has been argued that explicitly capturing the underlying structure of data should allow connectionist systems to generalize in a more predictable and systematic manner. Indeed, evidence in humans suggests that interpreting the world in terms of symbol-like compositional entities may be crucial for intelligent behavior and high-level reasoning. Another common limitation of deep learning systems is that they require large amounts of training data, which can be expensive to obtain. In representation learning, large datasets are leveraged to learn generic data representations that may be useful for efficient learning of arbitrary downstream tasks. This thesis is about structured representation learning. We study methods that learn, with little or no supervision, representations of unstructured data that capture its hidden structure. In the first part of the thesis, we focus on representations that disentangle the explanatory factors of variation of the data. We scale up disentangled representation learning to a novel robotic dataset, and perform a systematic large-scale study on the role of pretrained representations for out-of-distribution generalization in downstream robotic tasks. The second part of this thesis focuses on object-centric representations, which capture the compositional structure of the input in terms of symbol-like entities, such as objects in visual scenes. Object-centric learning methods learn to form meaningful entities from unstructured input, enabling symbolic information processing on a connectionist substrate. In this study, we train a selection of methods on several common datasets, and investigate their usefulness for downstream tasks and their ability to generalize out of distribution.