 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
SARF: Aliasing Relation Assisted Self-Supervised Learning for Few-shot Relation Reasoning
Apr 20, 2023
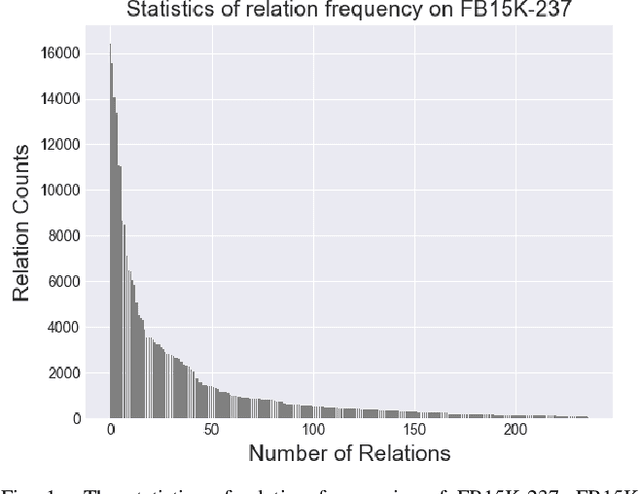
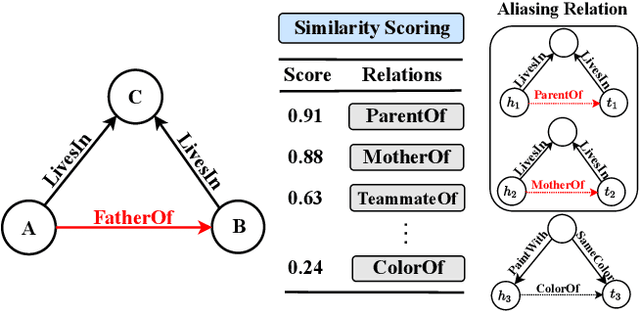
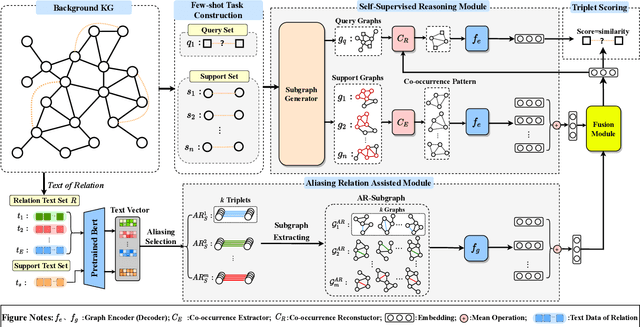
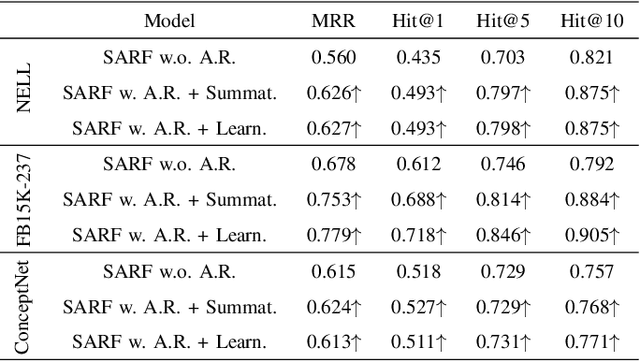
Few-shot relation reasoning on knowledge graphs (FS-KGR) aims to infer long-tail data-poor relations, which has drawn increasing attention these years due to its practicalities. The pre-training of previous methods needs to manually construct the meta-relation set, leading to numerous labor costs. Self-supervised learning (SSL) is treated as a solution to tackle the issue, but still at an early stage for FS-KGR task. Moreover, most of the existing methods ignore leveraging the beneficial information from aliasing relations (AR), i.e., data-rich relations with similar contextual semantics to the target data-poor relation. Therefore, we proposed a novel Self-Supervised Learning model by leveraging Aliasing Relations to assist FS-KGR, termed SARF. Concretely, four main components are designed in our model, i.e., SSL reasoning module, AR-assisted mechanism, fusion module, and scoring function. We first generate the representation of the co-occurrence patterns in a generative manner. Meanwhile, the representations of aliasing relations are learned to enhance reasoning in the AR-assist mechanism. Besides, multiple strategies, i.e., simple summation and learnable fusion, are offered for representation fusion. Finally, the generated representation is used for scoring. Extensive experiments on three few-shot benchmarks demonstrate that SARF achieves state-of-the-art performance compared with other methods in most cases.
Get Rid Of Your Trail: Remotely Erasing Backdoors in Federated Learning
Apr 20, 2023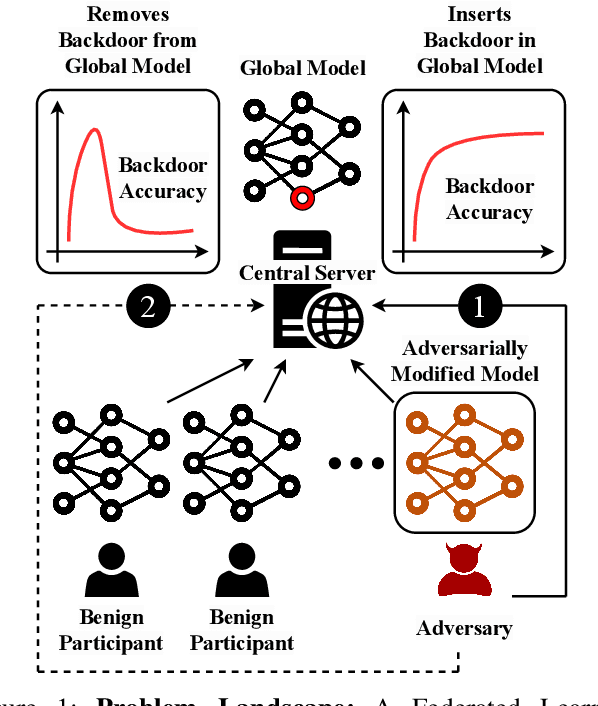
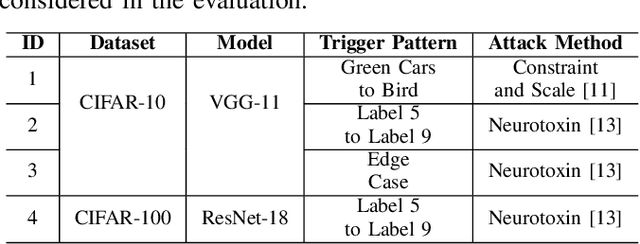
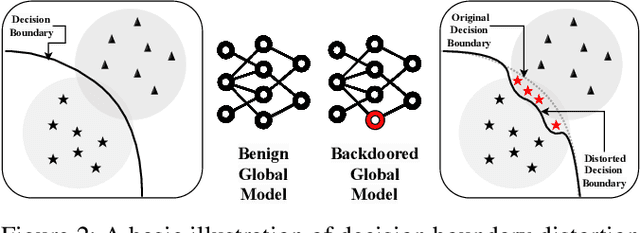
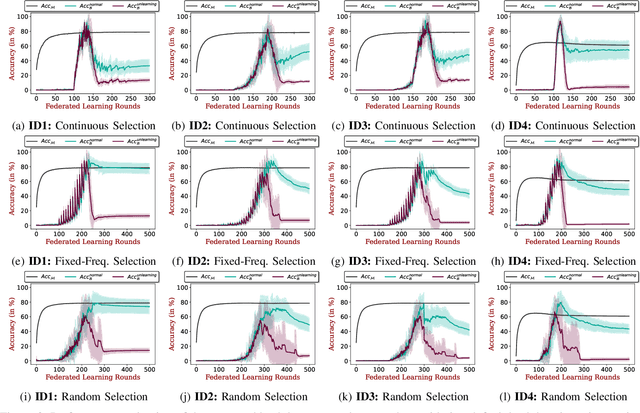
Federated Learning (FL) enables collaborative deep learning training across multiple participants without exposing sensitive personal data. However, the distributed nature of FL and the unvetted participants' data makes it vulnerable to backdoor attacks. In these attacks, adversaries inject malicious functionality into the centralized model during training, leading to intentional misclassifications for specific adversary-chosen inputs. While previous research has demonstrated successful injections of persistent backdoors in FL, the persistence also poses a challenge, as their existence in the centralized model can prompt the central aggregation server to take preventive measures to penalize the adversaries. Therefore, this paper proposes a methodology that enables adversaries to effectively remove backdoors from the centralized model upon achieving their objectives or upon suspicion of possible detection. The proposed approach extends the concept of machine unlearning and presents strategies to preserve the performance of the centralized model and simultaneously prevent over-unlearning of information unrelated to backdoor patterns, making the adversaries stealthy while removing backdoors. To the best of our knowledge, this is the first work that explores machine unlearning in FL to remove backdoors to the benefit of adversaries. Exhaustive evaluation considering image classification scenarios demonstrates the efficacy of the proposed method in efficient backdoor removal from the centralized model, injected by state-of-the-art attacks across multiple configurations.
Jedi: Entropy-based Localization and Removal of Adversarial Patches
Apr 20, 2023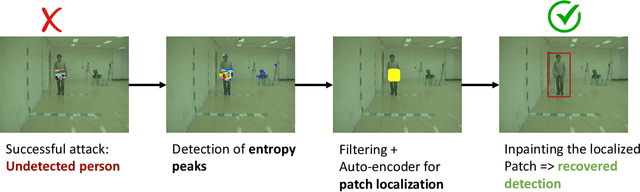
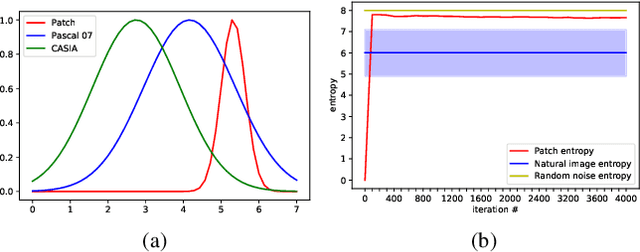
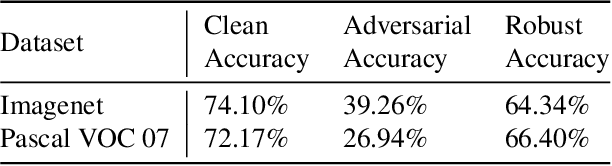
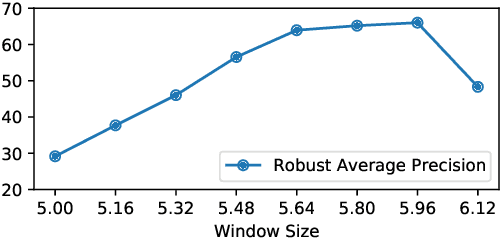
Real-world adversarial physical patches were shown to be successful in compromising state-of-the-art models in a variety of computer vision applications. Existing defenses that are based on either input gradient or features analysis have been compromised by recent GAN-based attacks that generate naturalistic patches. In this paper, we propose Jedi, a new defense against adversarial patches that is resilient to realistic patch attacks. Jedi tackles the patch localization problem from an information theory perspective; leverages two new ideas: (1) it improves the identification of potential patch regions using entropy analysis: we show that the entropy of adversarial patches is high, even in naturalistic patches; and (2) it improves the localization of adversarial patches, using an autoencoder that is able to complete patch regions from high entropy kernels. Jedi achieves high-precision adversarial patch localization, which we show is critical to successfully repair the images. Since Jedi relies on an input entropy analysis, it is model-agnostic, and can be applied on pre-trained off-the-shelf models without changes to the training or inference of the protected models. Jedi detects on average 90% of adversarial patches across different benchmarks and recovers up to 94% of successful patch attacks (Compared to 75% and 65% for LGS and Jujutsu, respectively).
The Future of ChatGPT-enabled Labor Market: A Preliminary Study
Apr 20, 2023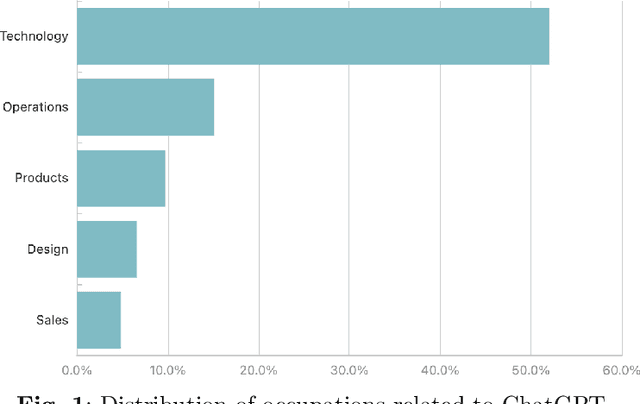
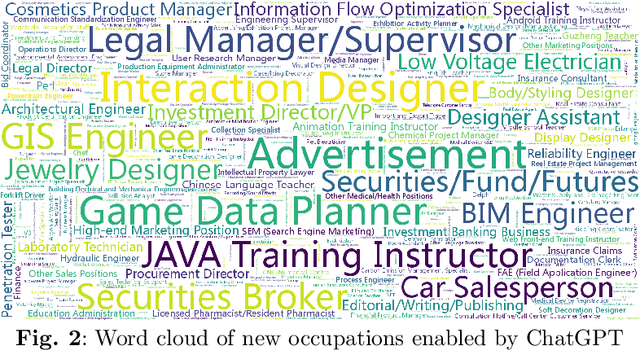
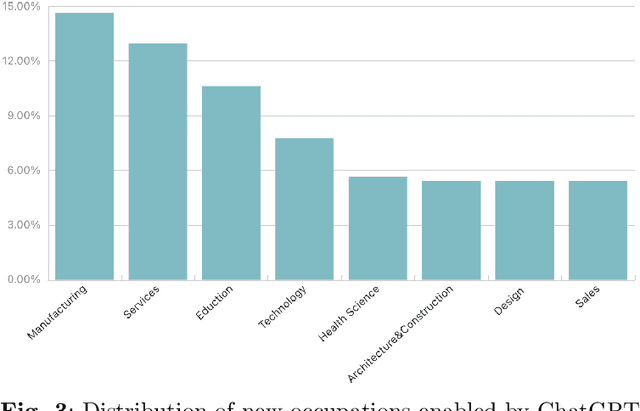
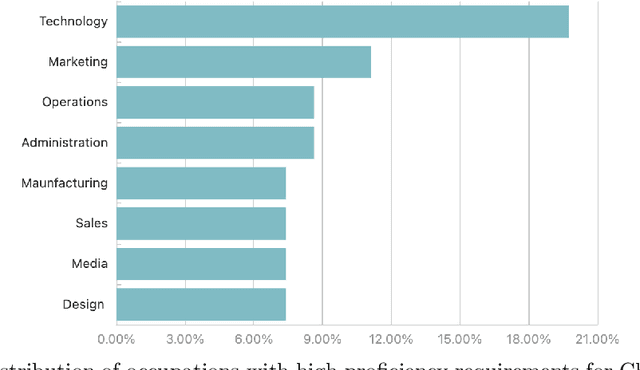
As a phenomenal large language model, ChatGPT has achieved unparalleled success in various real-world tasks and increasingly plays an important role in our daily lives and work. However, extensive concerns are also raised about the potential ethical issues, especially about whether ChatGPT-like artificial general intelligence (AGI) will replace human jobs. To this end, in this paper, we introduce a preliminary data-driven study on the future of ChatGPT-enabled labor market from the view of Human-AI Symbiosis instead of Human-AI Confrontation. To be specific, we first conduct an in-depth analysis of large-scale job posting data in BOSS Zhipin, the largest online recruitment platform in China. The results indicate that about 28% of occupations in the current labor market require ChatGPT-related skills. Furthermore, based on a large-scale occupation-centered knowledge graph, we develop a semantic information enhanced collaborative filtering algorithm to predict the future occupation-skill relations in the labor market. As a result, we find that additional 45% occupations in the future will require ChatGPT-related skills. In particular, industries related to technology, products, and operations are expected to have higher proficiency requirements for ChatGPT-related skills, while the manufacturing, services, education, and health science related industries will have lower requirements for ChatGPT-related skills.
LA3: Efficient Label-Aware AutoAugment
Apr 20, 2023Automated augmentation is an emerging and effective technique to search for data augmentation policies to improve generalizability of deep neural network training. Most existing work focuses on constructing a unified policy applicable to all data samples in a given dataset, without considering sample or class variations. In this paper, we propose a novel two-stage data augmentation algorithm, named Label-Aware AutoAugment (LA3), which takes advantage of the label information, and learns augmentation policies separately for samples of different labels. LA3 consists of two learning stages, where in the first stage, individual augmentation methods are evaluated and ranked for each label via Bayesian Optimization aided by a neural predictor, which allows us to identify effective augmentation techniques for each label under a low search cost. And in the second stage, a composite augmentation policy is constructed out of a selection of effective as well as complementary augmentations, which produces significant performance boost and can be easily deployed in typical model training. Extensive experiments demonstrate that LA3 achieves excellent performance matching or surpassing existing methods on CIFAR-10 and CIFAR-100, and achieves a new state-of-the-art ImageNet accuracy of 79.97% on ResNet-50 among auto-augmentation methods, while maintaining a low computational cost.
Multi-label Node Classification On Graph-Structured Data
Apr 20, 2023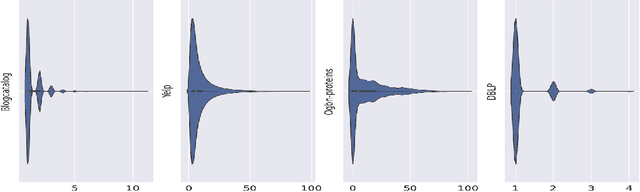

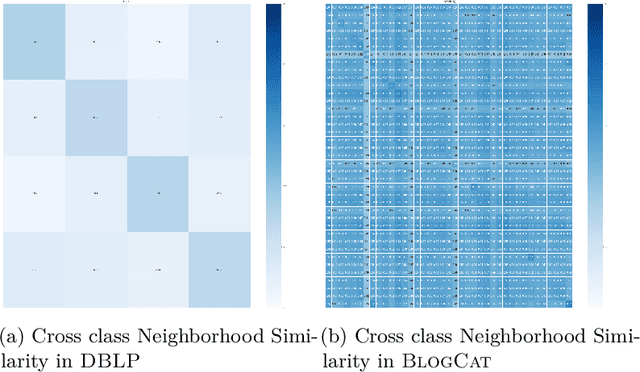

Graph Neural Networks (GNNs) have shown state-of-the-art improvements in node classification tasks on graphs. While these improvements have been largely demonstrated in a multi-class classification scenario, a more general and realistic scenario in which each node could have multiple labels has so far received little attention. The first challenge in conducting focused studies on multi-label node classification is the limited number of publicly available multi-label graph datasets. Therefore, as our first contribution, we collect and release three real-world biological datasets and develop a multi-label graph generator to generate datasets with tunable properties. While high label similarity (high homophily) is usually attributed to the success of GNNs, we argue that a multi-label scenario does not follow the usual semantics of homophily and heterophily so far defined for a multi-class scenario. As our second contribution, besides defining homophily for the multi-label scenario, we develop a new approach that dynamically fuses the feature and label correlation information to learn label-informed representations. Finally, we perform a large-scale comparative study with $10$ methods and $9$ datasets which also showcase the effectiveness of our approach. We release our benchmark at \url{https://anonymous.4open.science/r/LFLF-5D8C/}.
Two-Memory Reinforcement Learning
Apr 20, 2023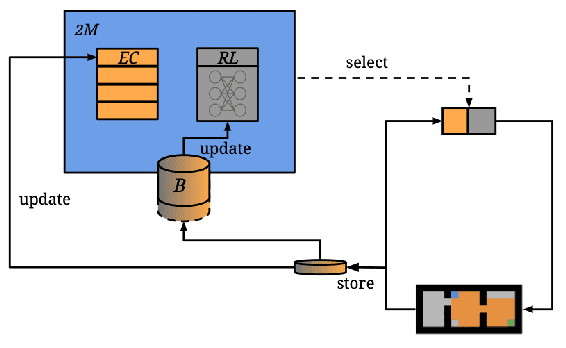
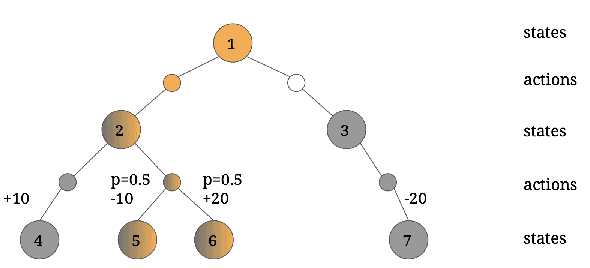

While deep reinforcement learning has shown important empirical success, it tends to learn relatively slow due to slow propagation of rewards information and slow update of parametric neural networks. Non-parametric episodic memory, on the other hand, provides a faster learning alternative that does not require representation learning and uses maximum episodic return as state-action values for action selection. Episodic memory and reinforcement learning both have their own strengths and weaknesses. Notably, humans can leverage multiple memory systems concurrently during learning and benefit from all of them. In this work, we propose a method called Two-Memory reinforcement learning agent (2M) that combines episodic memory and reinforcement learning to distill both of their strengths. The 2M agent exploits the speed of the episodic memory part and the optimality and the generalization capacity of the reinforcement learning part to complement each other. Our experiments demonstrate that the 2M agent is more data efficient and outperforms both pure episodic memory and pure reinforcement learning, as well as a state-of-the-art memory-augmented RL agent. Moreover, the proposed approach provides a general framework that can be used to combine any episodic memory agent with other off-policy reinforcement learning algorithms.
Feature point detection in HDR images based on coefficient of variation
Apr 20, 2023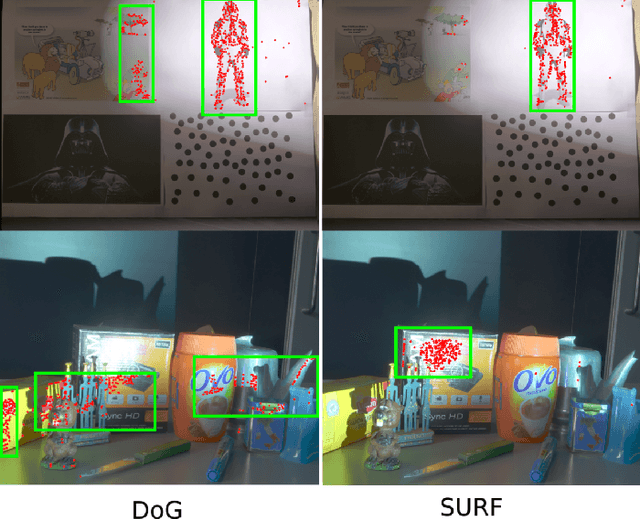

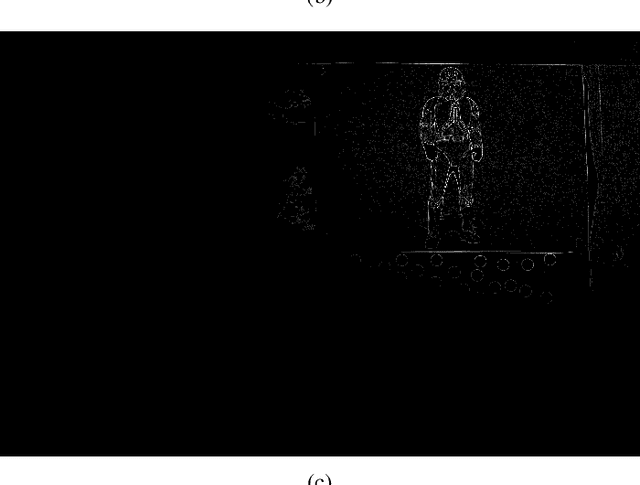
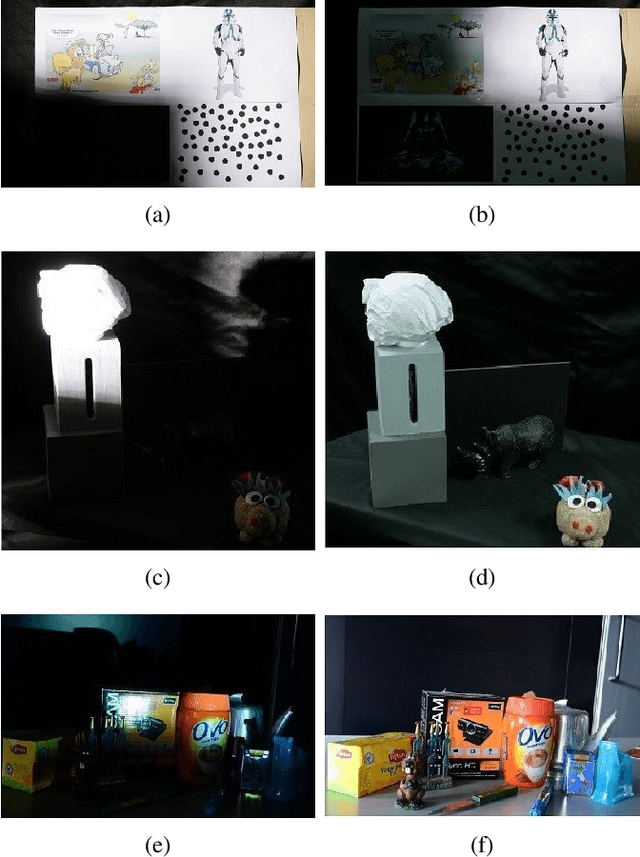
Feature point (FP) detection is a fundamental step of many computer vision tasks. However, FP detectors are usually designed for low dynamic range (LDR) images. In scenes with extreme light conditions, LDR images present saturated pixels, which degrade FP detection. On the other hand, high dynamic range (HDR) images usually present no saturated pixels but FP detection algorithms do not take advantage of all the information present in such images. FP detection frequently relies on differential methods, which work well in LDR images. However, in HDR images, the differential operation response in bright areas overshadows the response in dark areas. As an alternative to standard FP detection methods, this study proposes an FP detector based on a coefficient of variation (CV) designed for HDR images. The CV operation adapts its response based on the standard deviation of pixels inside a window, working well in both dark and bright areas of HDR images. The proposed and standard detectors are evaluated by measuring their repeatability rate (RR) and uniformity. Our proposed detector shows better performance when compared to other standard state-of-the-art detectors. In uniformity metric, our proposed detector surpasses all the other algorithms. In other hand, when using the repeatability rate metric, the proposed detector is worse than Harris for HDR and SURF detectors.
Multi-view Vision-Prompt Fusion Network: Can 2D Pre-trained Model Boost 3D Point Cloud Data-scarce Learning?
Apr 20, 2023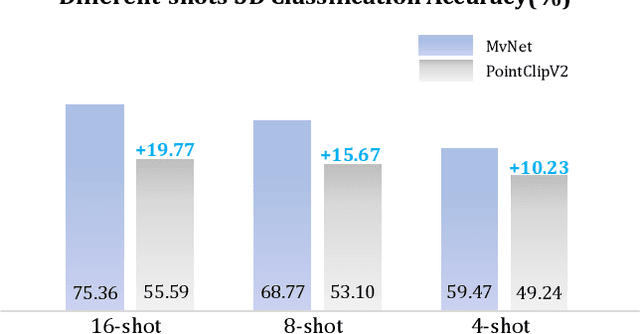
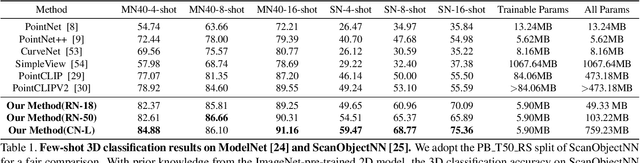
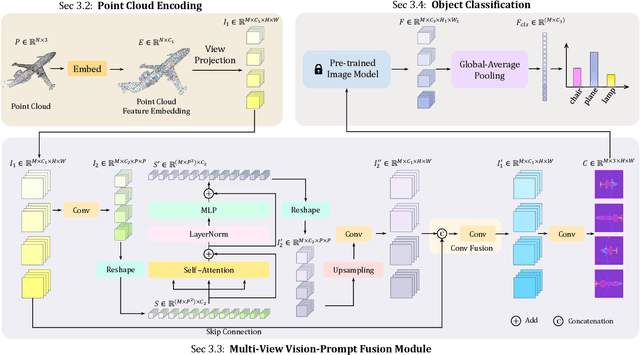
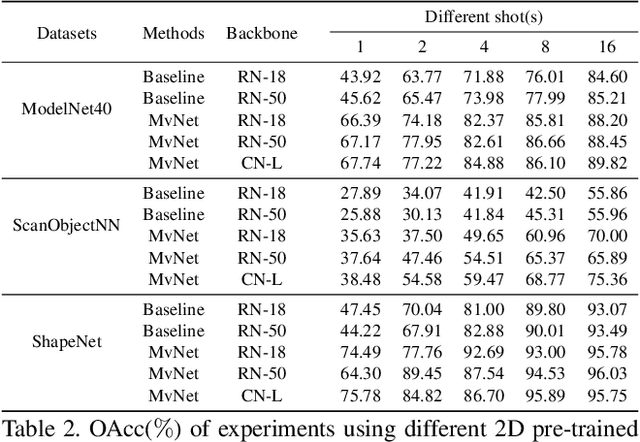
Point cloud based 3D deep model has wide applications in many applications such as autonomous driving, house robot, and so on. Inspired by the recent prompt learning in natural language processing, this work proposes a novel Multi-view Vision-Prompt Fusion Network (MvNet) for few-shot 3D point cloud classification. MvNet investigates the possibility of leveraging the off-the-shelf 2D pre-trained models to achieve the few-shot classification, which can alleviate the over-dependence issue of the existing baseline models towards the large-scale annotated 3D point cloud data. Specifically, MvNet first encodes a 3D point cloud into multi-view image features for a number of different views. Then, a novel multi-view prompt fusion module is developed to effectively fuse information from different views to bridge the gap between 3D point cloud data and 2D pre-trained models. A set of 2D image prompts can then be derived to better describe the suitable prior knowledge for a large-scale pre-trained image model for few-shot 3D point cloud classification. Extensive experiments on ModelNet, ScanObjectNN, and ShapeNet datasets demonstrate that MvNet achieves new state-of-the-art performance for 3D few-shot point cloud image classification. The source code of this work will be available soon.
Integrated Design of Cooperative Area Coverage and Target Tracking with Multi-UAV System
Mar 16, 2023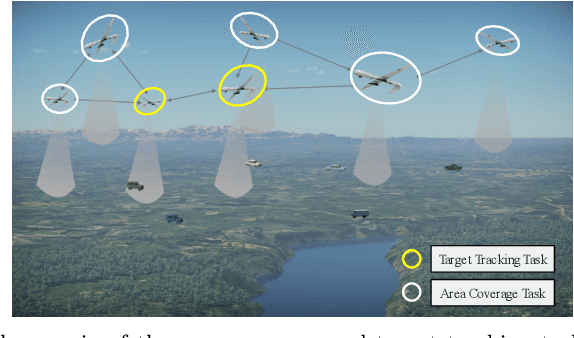
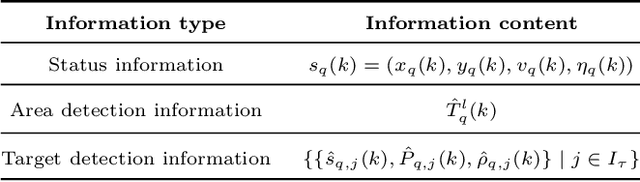
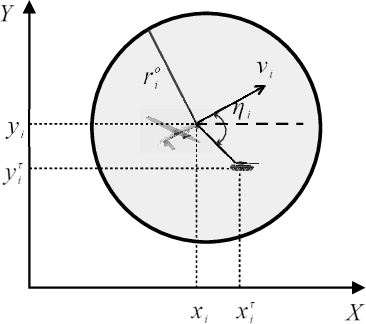
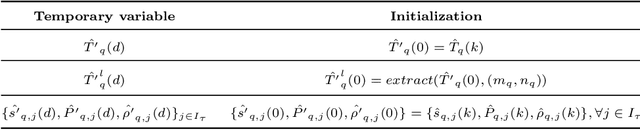
This paper systematically studies the cooperative area coverage and target tracking problem of multiple-unmanned aerial vehicles (multi-UAVs). The problem is solved by decomposing into three sub-problems: information fusion, task assignment, and multi-UAV behavior decision-making. Specifically, in the information fusion process, we use the maximum consistency protocol to update the joint estimation states of multi-targets (JESMT) and the area detection information. The area detection information is represented by the equivalent visiting time map (EVTM), which is built based on the detection probability and the actual visiting time of the area. Then, we model the task assignment problem of multi-UAV searching and tracking multi-targets as a network flow model with upper and lower flow bounds. An algorithm named task assignment minimum-cost maximum-flow (TAMM) is proposed. Cooperative behavior decision-making uses Fisher information as the mission reward to obtain the optimal tracking action of the UAV. Furthermore, a coverage behavior decision-making algorithm based on the anti-flocking method is designed for those UAVs assigned the coverage task. Finally, a distributed multi-UAV cooperative area coverage and target tracking algorithm is designed, which integrates information fusion, task assignment, and behavioral decision-making. Numerical and hardware-in-the-loop simulation results show that the proposed method can achieve persistent area coverage and cooperative target tracking.