 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Turning Privacy-preserving Mechanisms against Federated Learning
May 09, 2023
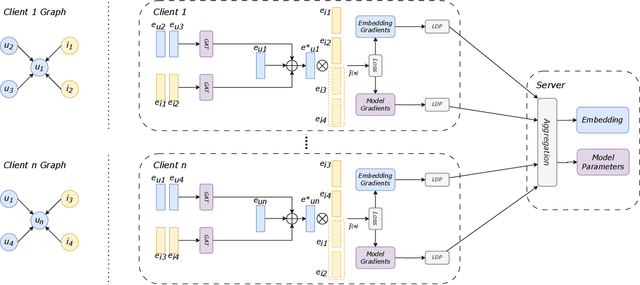
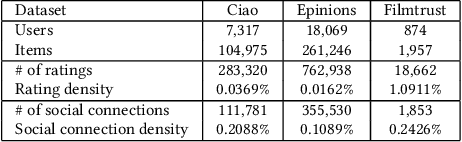
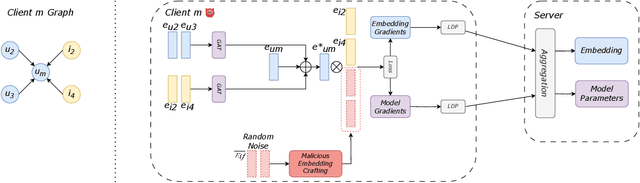
Recently, researchers have successfully employed Graph Neural Networks (GNNs) to build enhanced recommender systems due to their capability to learn patterns from the interaction between involved entities. In addition, previous studies have investigated federated learning as the main solution to enable a native privacy-preserving mechanism for the construction of global GNN models without collecting sensitive data into a single computation unit. Still, privacy issues may arise as the analysis of local model updates produced by the federated clients can return information related to sensitive local data. For this reason, experts proposed solutions that combine federated learning with Differential Privacy strategies and community-driven approaches, which involve combining data from neighbor clients to make the individual local updates less dependent on local sensitive data. In this paper, we identify a crucial security flaw in such a configuration, and we design an attack capable of deceiving state-of-the-art defenses for federated learning. The proposed attack includes two operating modes, the first one focusing on convergence inhibition (Adversarial Mode), and the second one aiming at building a deceptive rating injection on the global federated model (Backdoor Mode). The experimental results show the effectiveness of our attack in both its modes, returning on average 60% performance detriment in all the tests on Adversarial Mode and fully effective backdoors in 93% of cases for the tests performed on Backdoor Mode.
Robust Beamforming Design for RIS-aided Cell-free Systems with CSI Uncertainties and Capacity-limited Backhaul
May 09, 2023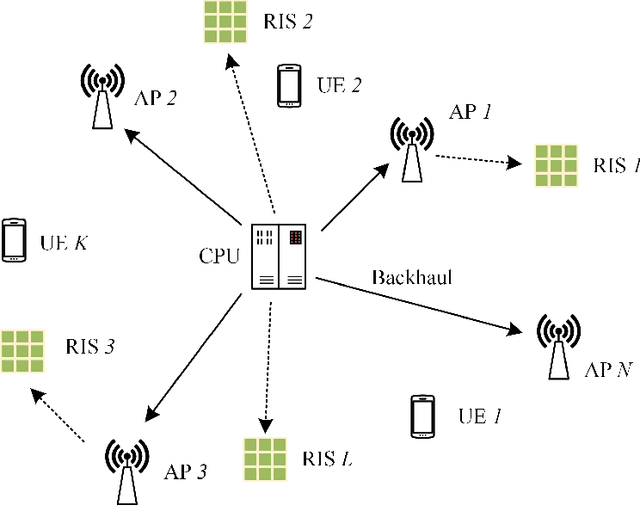
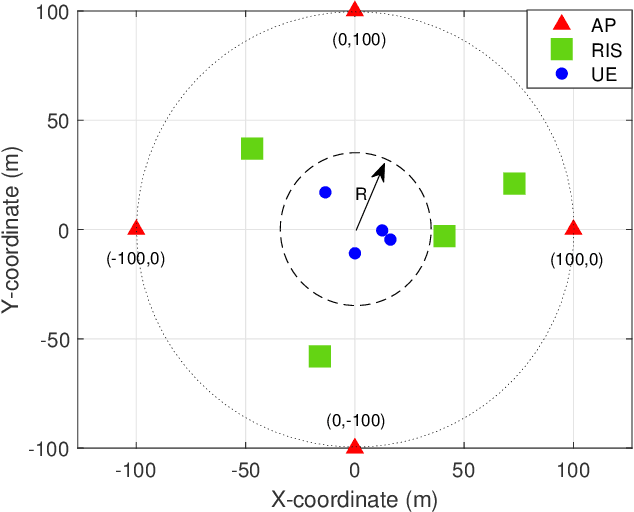
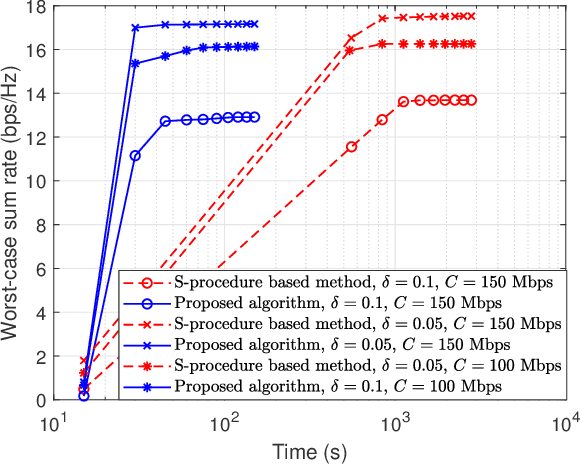
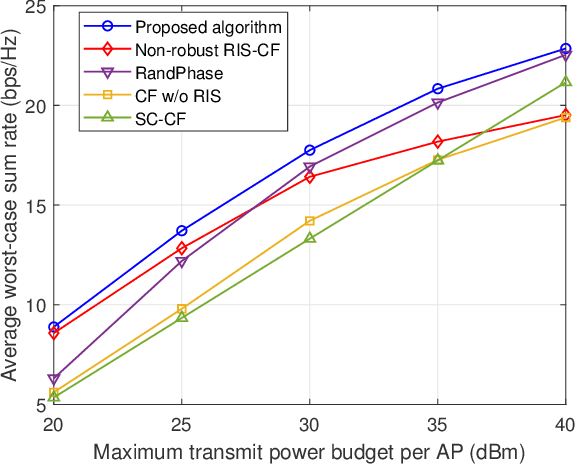
In this paper, we consider the robust beamforming design in a reconfigurable intelligent surface (RIS)-aided cell-free (CF) system considering the channel state information (CSI) uncertainties of both the direct channels and cascaded channels at the transmitter with capacity-limited backhaul. We jointly optimize the precoding at the access points (APs) and the phase shifts at multiple RISs to maximize the worst-case sum rate of the CF system subject to the constraints of maximum transmit power of APs, unit-modulus phase shifts, limited backhaul capacity, and bounded CSI errors. By applying a series of transformations, the non-smoothness and semi-infinite constraints are tackled in a low-complexity manner that facilitates the design of an alternating optimization (AO)-based iterative algorithm. The proposed algorithm divides the considered problem into two subproblems. For the RIS phase shifts optimization subproblem, we exploit the penalty convex-concave procedure (P-CCP) to obtain a stationary solution and achieve effective initialization. For precoding optimization subproblem, successive convex approximation (SCA) is adopted with a convergence guarantee to a Karush-Kuhn-Tucker (KKT) solution. Numerical results demonstrate the effectiveness of the proposed robust beamforming design, which achieves superior performance with low complexity. Moreover, the importance of RIS phase shift optimization for robustness and the advantages of distributed RISs in the CF system are further highlighted.
Ranking & Reweighting Improves Group Distributional Robustness
May 09, 2023
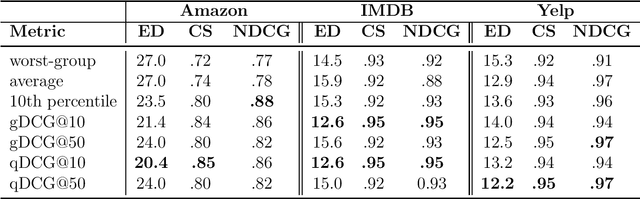
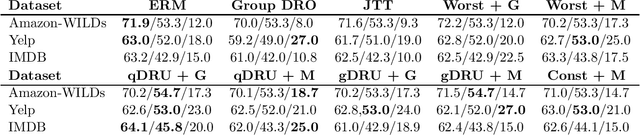
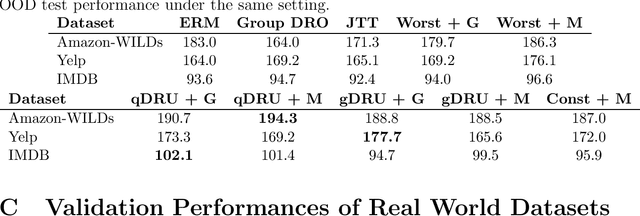
Recent work has shown that standard training via empirical risk minimization (ERM) can produce models that achieve high accuracy on average but low accuracy on underrepresented groups due to the prevalence of spurious features. A predominant approach to tackle this group robustness problem minimizes the worst group error (akin to a minimax strategy) on the training data, hoping it will generalize well on the testing data. However, this is often suboptimal, especially when the out-of-distribution (OOD) test data contains previously unseen groups. Inspired by ideas from the information retrieval and learning-to-rank literature, this paper first proposes to use Discounted Cumulative Gain (DCG) as a metric of model quality for facilitating better hyperparameter tuning and model selection. Being a ranking-based metric, DCG weights multiple poorly-performing groups (instead of considering just the group with the worst performance). As a natural next step, we build on our results to propose a ranking-based training method called Discounted Rank Upweighting (DRU), which differentially reweights a ranked list of poorly-performing groups in the training data to learn models that exhibit strong OOD performance on the test data. Results on several synthetic and real-world datasets highlight the superior generalization ability of our group-ranking-based (akin to soft-minimax) approach in selecting and learning models that are robust to group distributional shifts.
Temporal and Heterogeneous Graph Neural Network for Financial Time Series Prediction
May 09, 2023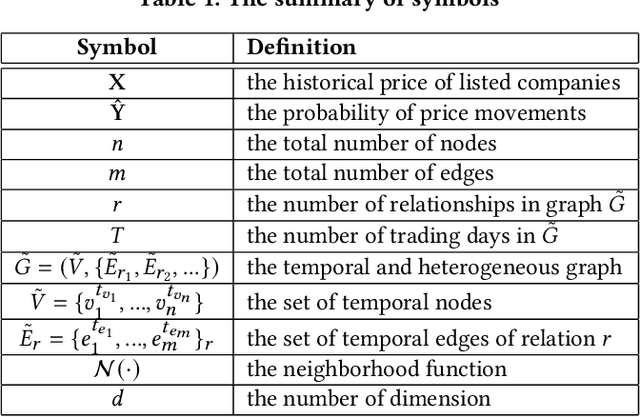
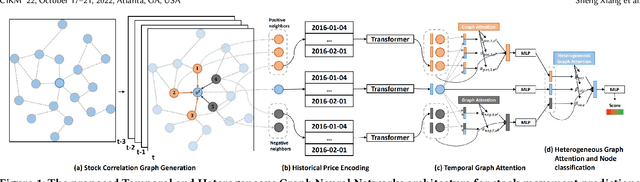
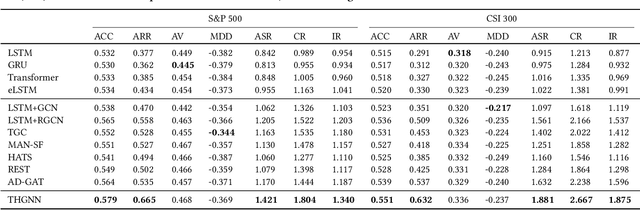
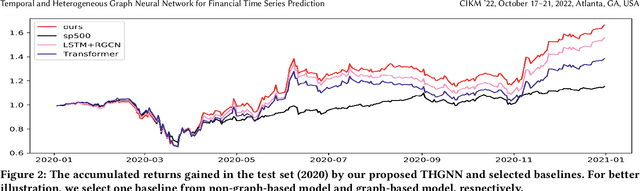
The price movement prediction of stock market has been a classical yet challenging problem, with the attention of both economists and computer scientists. In recent years, graph neural network has significantly improved the prediction performance by employing deep learning on company relations. However, existing relation graphs are usually constructed by handcraft human labeling or nature language processing, which are suffering from heavy resource requirement and low accuracy. Besides, they cannot effectively response to the dynamic changes in relation graphs. Therefore, in this paper, we propose a temporal and heterogeneous graph neural network-based (THGNN) approach to learn the dynamic relations among price movements in financial time series. In particular, we first generate the company relation graph for each trading day according to their historic price. Then we leverage a transformer encoder to encode the price movement information into temporal representations. Afterward, we propose a heterogeneous graph attention network to jointly optimize the embeddings of the financial time series data by transformer encoder and infer the probability of target movements. Finally, we conduct extensive experiments on the stock market in the United States and China. The results demonstrate the effectiveness and superior performance of our proposed methods compared with state-of-the-art baselines. Moreover, we also deploy the proposed THGNN in a real-world quantitative algorithm trading system, the accumulated portfolio return obtained by our method significantly outperforms other baselines.
Robust Acoustic and Semantic Contextual Biasing in Neural Transducers for Speech Recognition
May 09, 2023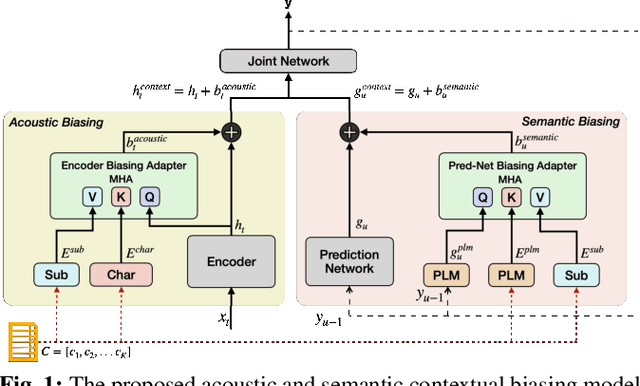
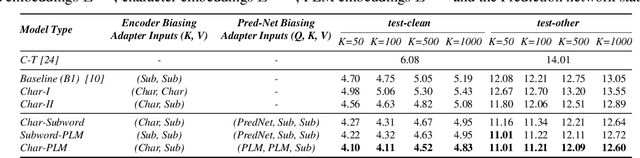
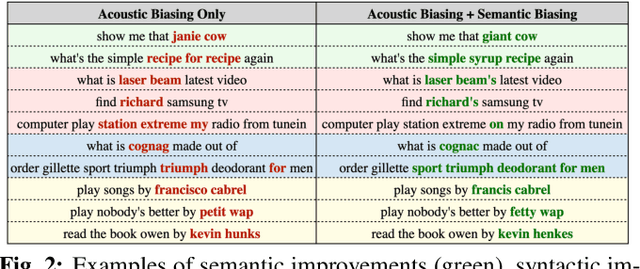
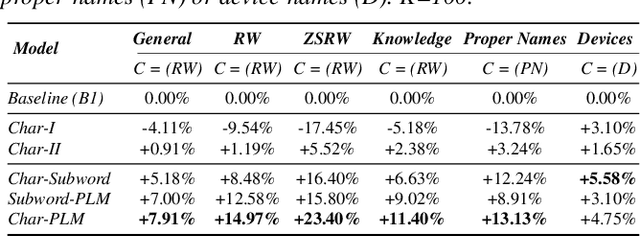
Attention-based contextual biasing approaches have shown significant improvements in the recognition of generic and/or personal rare-words in End-to-End Automatic Speech Recognition (E2E ASR) systems like neural transducers. These approaches employ cross-attention to bias the model towards specific contextual entities injected as bias-phrases to the model. Prior approaches typically relied on subword encoders for encoding the bias phrases. However, subword tokenizations are coarse and fail to capture granular pronunciation information which is crucial for biasing based on acoustic similarity. In this work, we propose to use lightweight character representations to encode fine-grained pronunciation features to improve contextual biasing guided by acoustic similarity between the audio and the contextual entities (termed acoustic biasing). We further integrate pretrained neural language model (NLM) based encoders to encode the utterance's semantic context along with contextual entities to perform biasing informed by the utterance's semantic context (termed semantic biasing). Experiments using a Conformer Transducer model on the Librispeech dataset show a 4.62% - 9.26% relative WER improvement on different biasing list sizes over the baseline contextual model when incorporating our proposed acoustic and semantic biasing approach. On a large-scale in-house dataset, we observe 7.91% relative WER improvement compared to our baseline model. On tail utterances, the improvements are even more pronounced with 36.80% and 23.40% relative WER improvements on Librispeech rare words and an in-house testset respectively.
Communication-Robust Multi-Agent Learning by Adaptable Auxiliary Multi-Agent Adversary Generation
May 09, 2023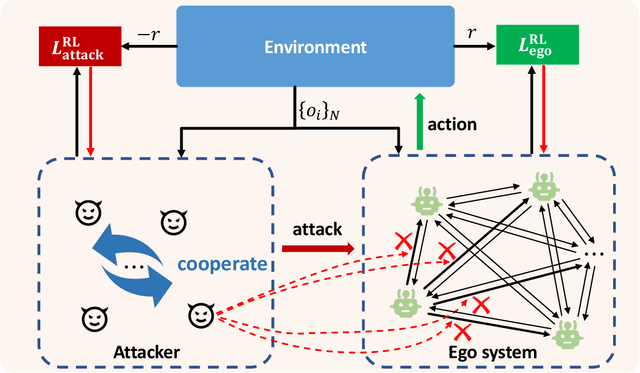
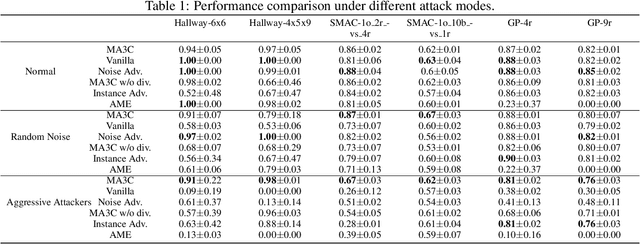
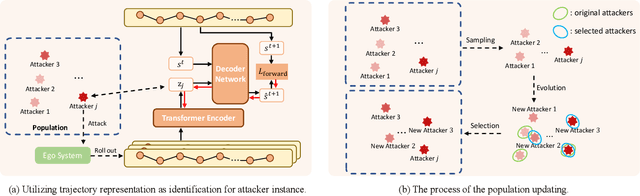
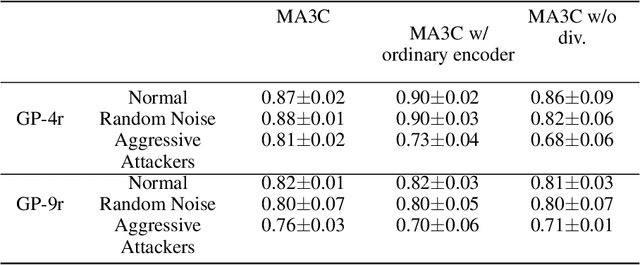
Communication can promote coordination in cooperative Multi-Agent Reinforcement Learning (MARL). Nowadays, existing works mainly focus on improving the communication efficiency of agents, neglecting that real-world communication is much more challenging as there may exist noise or potential attackers. Thus the robustness of the communication-based policies becomes an emergent and severe issue that needs more exploration. In this paper, we posit that the ego system trained with auxiliary adversaries may handle this limitation and propose an adaptable method of Multi-Agent Auxiliary Adversaries Generation for robust Communication, dubbed MA3C, to obtain a robust communication-based policy. In specific, we introduce a novel message-attacking approach that models the learning of the auxiliary attacker as a cooperative problem under a shared goal to minimize the coordination ability of the ego system, with which every information channel may suffer from distinct message attacks. Furthermore, as naive adversarial training may impede the generalization ability of the ego system, we design an attacker population generation approach based on evolutionary learning. Finally, the ego system is paired with an attacker population and then alternatively trained against the continuously evolving attackers to improve its robustness, meaning that both the ego system and the attackers are adaptable. Extensive experiments on multiple benchmarks indicate that our proposed MA3C provides comparable or better robustness and generalization ability than other baselines.
Knowledge Distillation from 3D to Bird's-Eye-View for LiDAR Semantic Segmentation
Apr 22, 2023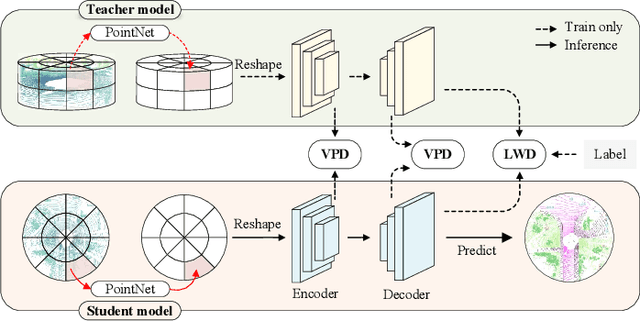
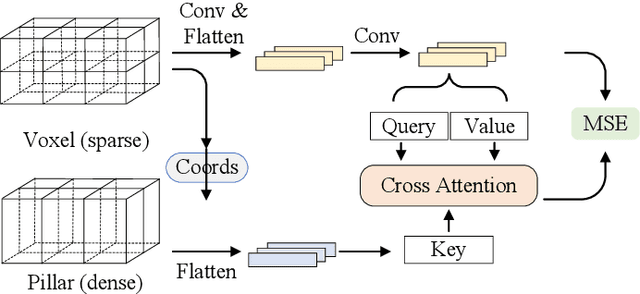
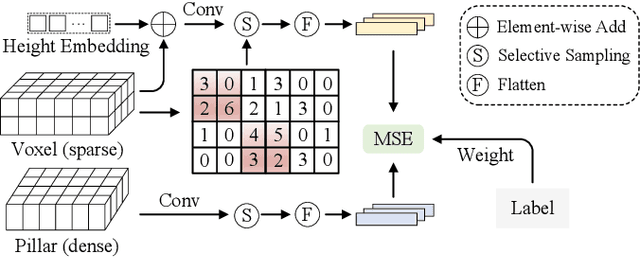
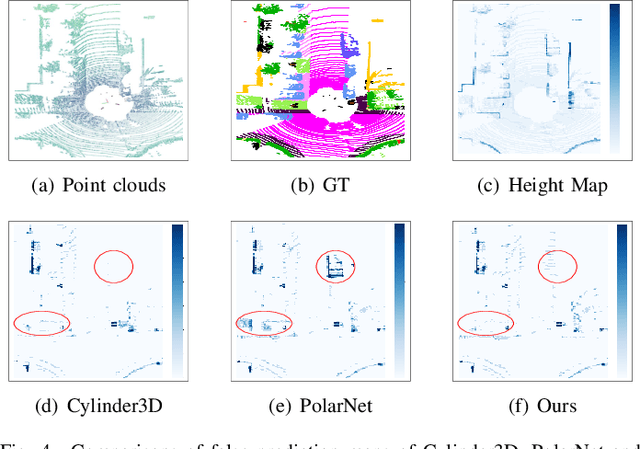
LiDAR point cloud segmentation is one of the most fundamental tasks for autonomous driving scene understanding. However, it is difficult for existing models to achieve both high inference speed and accuracy simultaneously. For example, voxel-based methods perform well in accuracy, while Bird's-Eye-View (BEV)-based methods can achieve real-time inference. To overcome this issue, we develop an effective 3D-to-BEV knowledge distillation method that transfers rich knowledge from 3D voxel-based models to BEV-based models. Our framework mainly consists of two modules: the voxel-to-pillar distillation module and the label-weight distillation module. Voxel-to-pillar distillation distills sparse 3D features to BEV features for middle layers to make the BEV-based model aware of more structural and geometric information. Label-weight distillation helps the model pay more attention to regions with more height information. Finally, we conduct experiments on the SemanticKITTI dataset and Paris-Lille-3D. The results on SemanticKITTI show more than 5% improvement on the test set, especially for classes such as motorcycle and person, with more than 15% improvement. The code can be accessed at https://github.com/fengjiang5/Knowledge-Distillation-from-Cylinder3D-to-PolarNet.
SAWU-Net: Spatial Attention Weighted Unmixing Network for Hyperspectral Images
Apr 22, 2023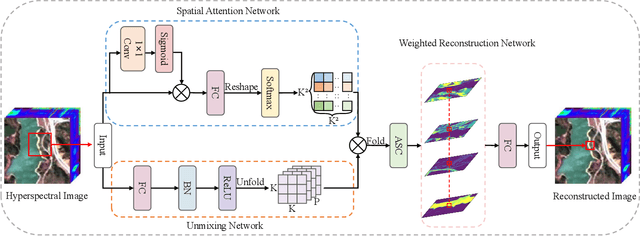
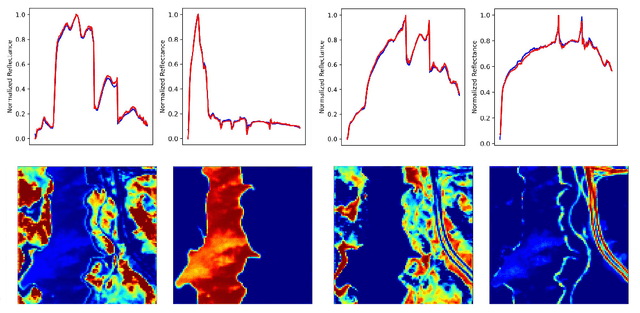
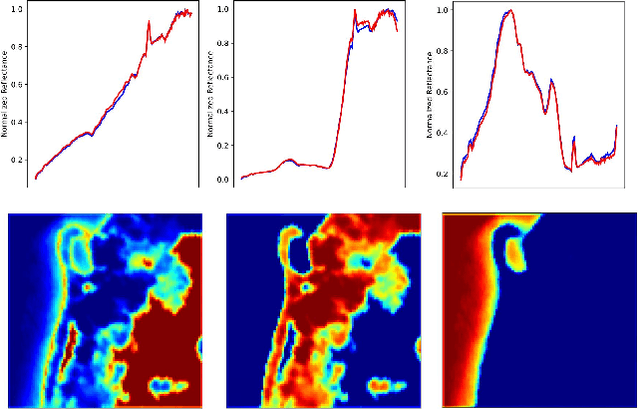
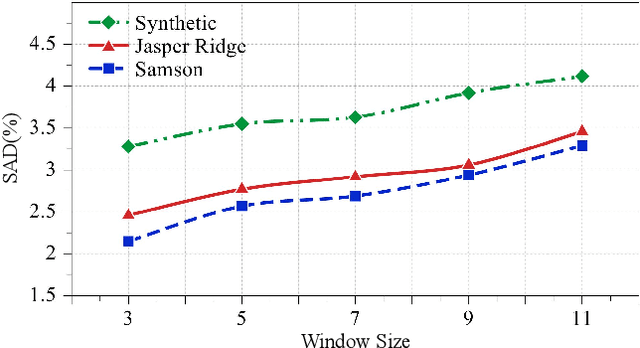
Hyperspectral unmixing is a critical yet challenging task in hyperspectral image interpretation. Recently, great efforts have been made to solve the hyperspectral unmixing task via deep autoencoders. However, existing networks mainly focus on extracting spectral features from mixed pixels, and the employment of spatial feature prior knowledge is still insufficient. To this end, we put forward a spatial attention weighted unmixing network, dubbed as SAWU-Net, which learns a spatial attention network and a weighted unmixing network in an end-to-end manner for better spatial feature exploitation. In particular, we design a spatial attention module, which consists of a pixel attention block and a window attention block to efficiently model pixel-based spectral information and patch-based spatial information, respectively. While in the weighted unmixing framework, the central pixel abundance is dynamically weighted by the coarse-grained abundances of surrounding pixels. In addition, SAWU-Net generates dynamically adaptive spatial weights through the spatial attention mechanism, so as to dynamically integrate surrounding pixels more effectively. Experimental results on real and synthetic datasets demonstrate the better accuracy and superiority of SAWU-Net, which reflects the effectiveness of the proposed spatial attention mechanism.
Voxel-wise classification for porosity investigation of additive manufactured parts with 3D unsupervised and (deeply) supervised neural networks
May 13, 2023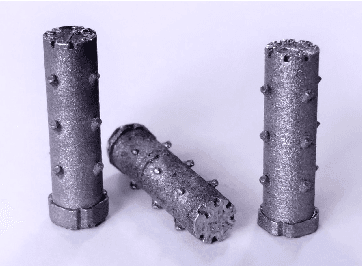
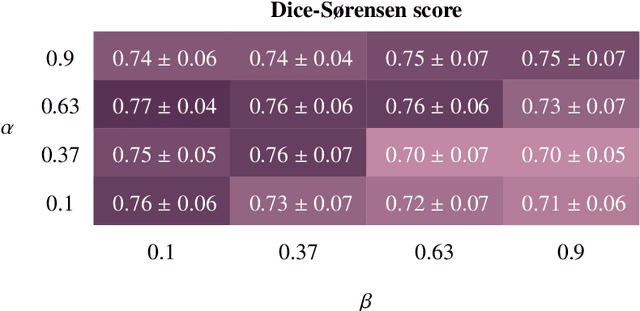
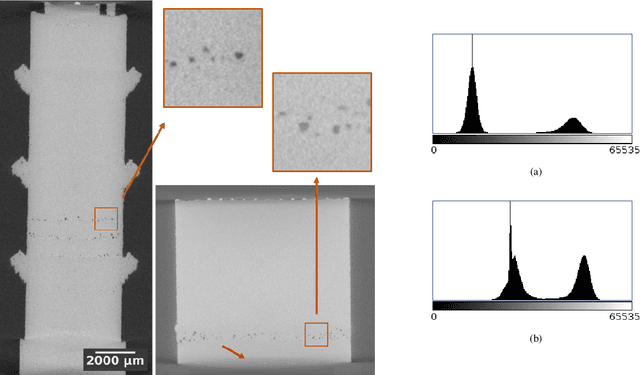

Additive Manufacturing (AM) has emerged as a manufacturing process that allows the direct production of samples from digital models. To ensure that quality standards are met in all manufactured samples of a batch, X-ray computed tomography (X-CT) is often used combined with automated anomaly detection. For the latter, deep learning (DL) anomaly detection techniques are increasingly, as they can be trained to be robust to the material being analysed and resilient towards poor image quality. Unfortunately, most recent and popular DL models have been developed for 2D image processing, thereby disregarding valuable volumetric information. This study revisits recent supervised (UNet, UNet++, UNet 3+, MSS-UNet) and unsupervised (VAE, ceVAE, gmVAE, vqVAE) DL models for porosity analysis of AM samples from X-CT images and extends them to accept 3D input data with a 3D-patch pipeline for lower computational requirements, improved efficiency and generalisability. The supervised models were trained using the Focal Tversky loss to address class imbalance that arises from the low porosity in the training datasets. The output of the unsupervised models is post-processed to reduce misclassifications caused by their inability to adequately represent the object surface. The findings were cross-validated in a 5-fold fashion and include: a performance benchmark of the DL models, an evaluation of the post-processing algorithm, an evaluation of the effect of training supervised models with the output of unsupervised models. In a final performance benchmark on a test set with poor image quality, the best performing supervised model was MSS-UNet with an average precision of 0.808 $\pm$ 0.013, while the best unsupervised model was the post-processed ceVAE with 0.935 $\pm$ 0.001. The VAE/ceVAE models demonstrated superior capabilities, particularly when leveraging post-processing techniques.
Deep Unsupervised Learning for 3D ALS Point Clouds Change Detection
May 05, 2023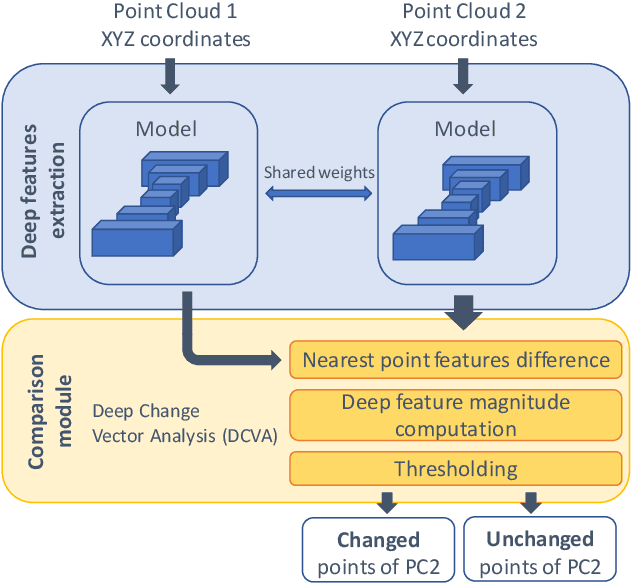


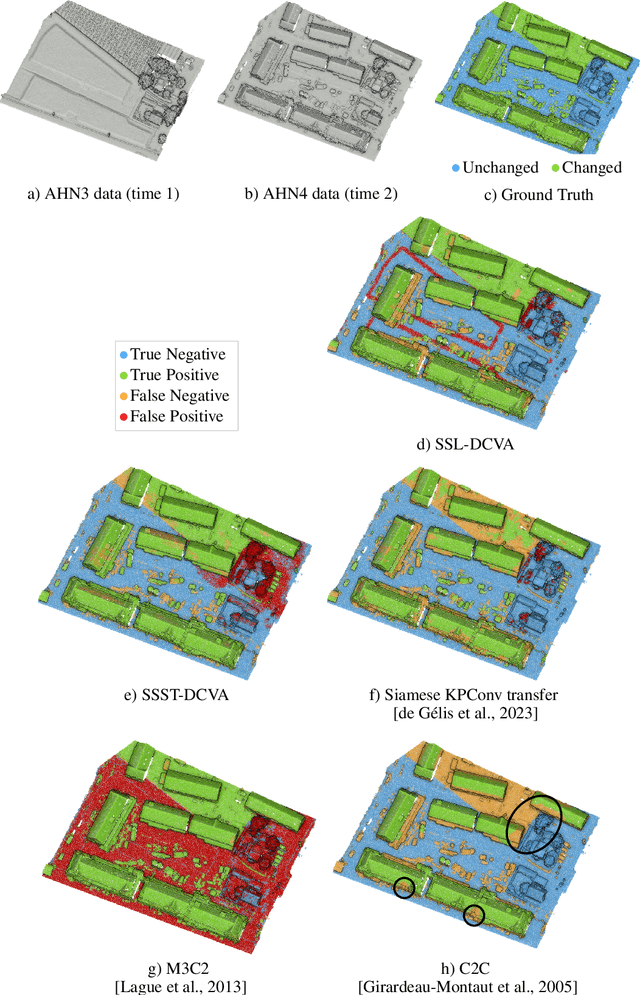
Change detection from traditional optical images has limited capability to model the changes in the height or shape of objects. Change detection using 3D point cloud aerial LiDAR survey data can fill this gap by providing critical depth information. While most existing machine learning based 3D point cloud change detection methods are supervised, they severely depend on the availability of annotated training data, which is in practice a critical point. To circumnavigate this dependence, we propose an unsupervised 3D point cloud change detection method mainly based on self-supervised learning using deep clustering and contrastive learning. The proposed method also relies on an adaptation of deep change vector analysis to 3D point cloud via nearest point comparison. Experiments conducted on a publicly available real dataset show that the proposed method obtains higher performance in comparison to the traditional unsupervised methods, with a gain of about 9% in mean accuracy (to reach more than 85%). Thus, it appears to be a relevant choice in scenario where prior knowledge (labels) is not ensured.