 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Signal Processing Based Antenna Pattern Characterization for MIMO Systems
Aug 18, 2023
Sophisticated antenna technologies are constantly evolving to meet the escalating data demands projected for 6G and future networks. The characterization of these emerging antenna systems poses challenges that necessitate a reevaluation of conventional techniques, which rely solely on simple measurements conducted in advanced anechoic chambers. In this study, our objective is to introduce a novel endeavour for antenna pattern characterization (APC) in next-generation multiple-input-multiple-output (MIMO) systems by utilizing the potential of signal processing tools. In contrast to traditional methods that struggle with multi-path scenarios and require specialized equipment for measurements, we endeavour to estimate the antenna pattern by exploiting information from both line-of-sight (LoS) and non-LoS contributions. This approach enables antenna pattern characterization in complex environments without the need for anechoic chambers, resulting in substantial cost savings. Furthermore, it grants a much wider research community the ability to independently perform APC for emerging complex 6G antenna systems, without relying on anechoic chambers. Simulation results demonstrate the efficacy of the proposed novel approach in accurately estimating the true antenna pattern.
MonoNeRD: NeRF-like Representations for Monocular 3D Object Detection
Aug 18, 2023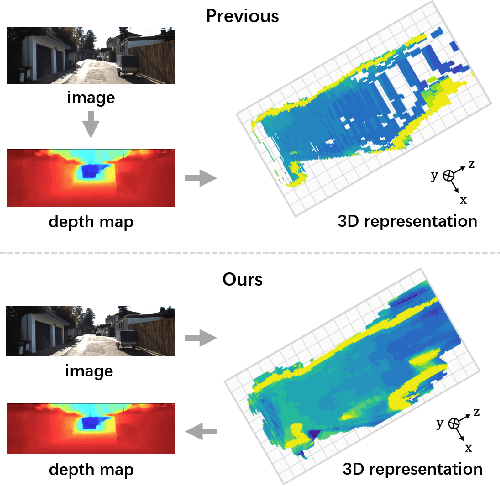

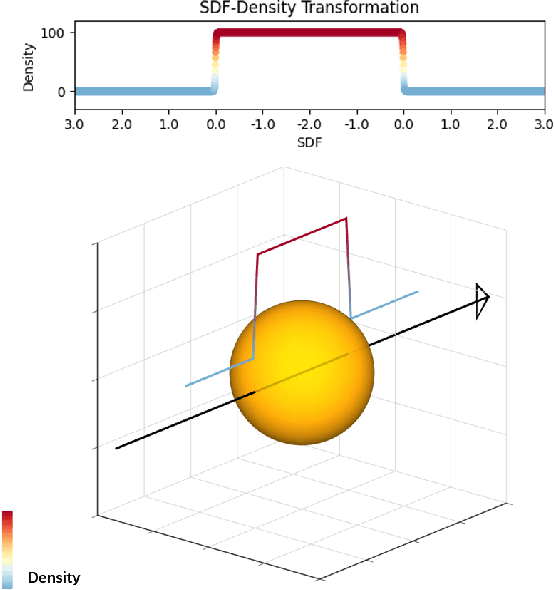
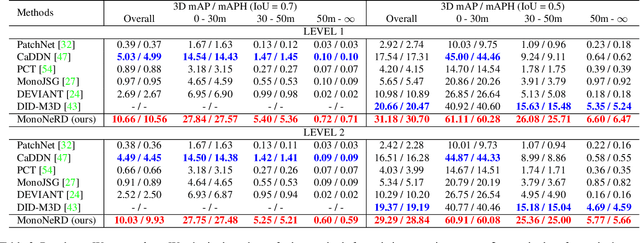
In the field of monocular 3D detection, it is common practice to utilize scene geometric clues to enhance the detector's performance. However, many existing works adopt these clues explicitly such as estimating a depth map and back-projecting it into 3D space. This explicit methodology induces sparsity in 3D representations due to the increased dimensionality from 2D to 3D, and leads to substantial information loss, especially for distant and occluded objects. To alleviate this issue, we propose MonoNeRD, a novel detection framework that can infer dense 3D geometry and occupancy. Specifically, we model scenes with Signed Distance Functions (SDF), facilitating the production of dense 3D representations. We treat these representations as Neural Radiance Fields (NeRF) and then employ volume rendering to recover RGB images and depth maps. To the best of our knowledge, this work is the first to introduce volume rendering for M3D, and demonstrates the potential of implicit reconstruction for image-based 3D perception. Extensive experiments conducted on the KITTI-3D benchmark and Waymo Open Dataset demonstrate the effectiveness of MonoNeRD. Codes are available at https://github.com/cskkxjk/MonoNeRD.
LibreFace: An Open-Source Toolkit for Deep Facial Expression Analysis
Aug 18, 2023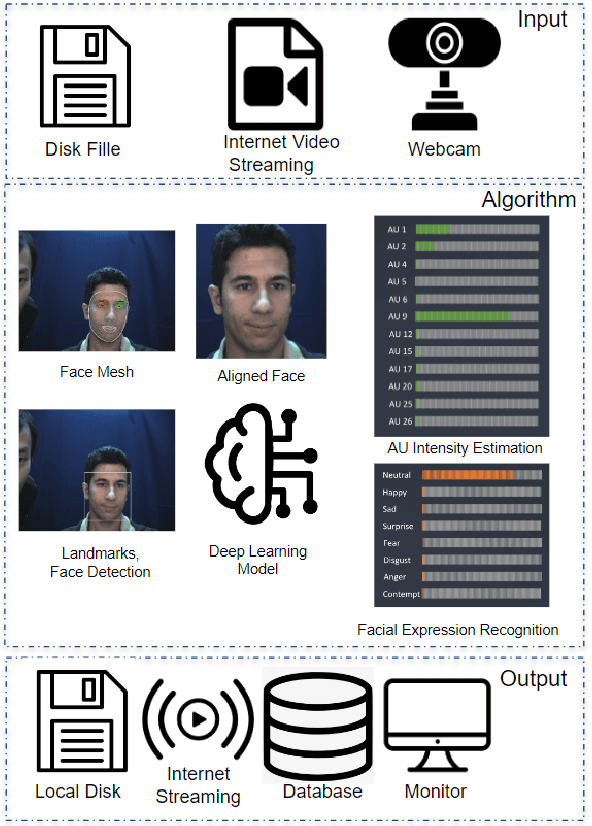
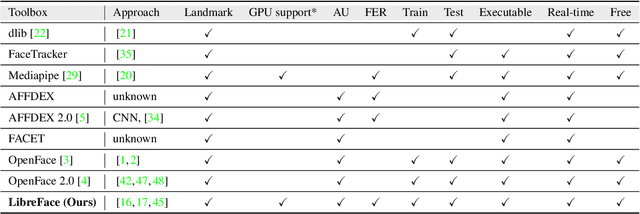
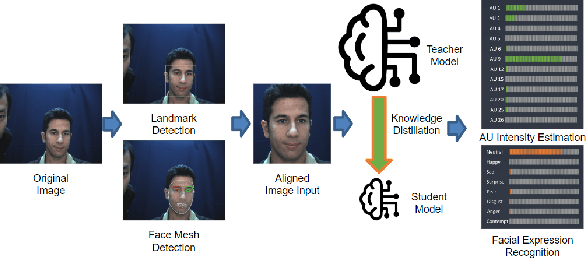
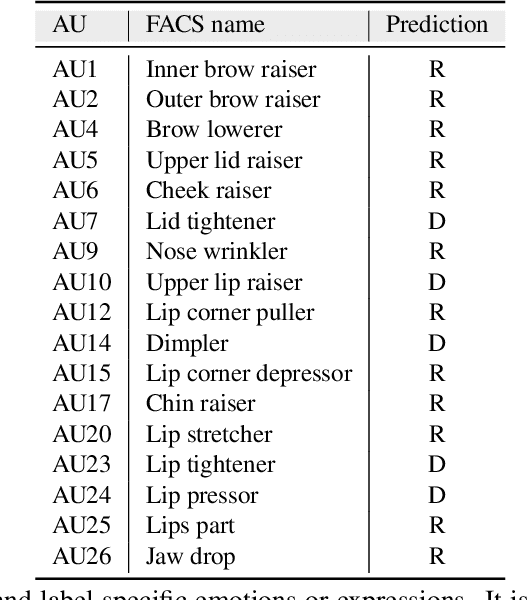
Facial expression analysis is an important tool for human-computer interaction. In this paper, we introduce LibreFace, an open-source toolkit for facial expression analysis. This open-source toolbox offers real-time and offline analysis of facial behavior through deep learning models, including facial action unit (AU) detection, AU intensity estimation, and facial expression recognition. To accomplish this, we employ several techniques, including the utilization of a large-scale pre-trained network, feature-wise knowledge distillation, and task-specific fine-tuning. These approaches are designed to effectively and accurately analyze facial expressions by leveraging visual information, thereby facilitating the implementation of real-time interactive applications. In terms of Action Unit (AU) intensity estimation, we achieve a Pearson Correlation Coefficient (PCC) of 0.63 on DISFA, which is 7% higher than the performance of OpenFace 2.0 while maintaining highly-efficient inference that runs two times faster than OpenFace 2.0. Despite being compact, our model also demonstrates competitive performance to state-of-the-art facial expression analysis methods on AffecNet, FFHQ, and RAFDB. Our code will be released at https://github.com/ihp-lab/LibreFace
Exploiting Point-Wise Attention in 6D Object Pose Estimation Based on Bidirectional Prediction
Aug 17, 2023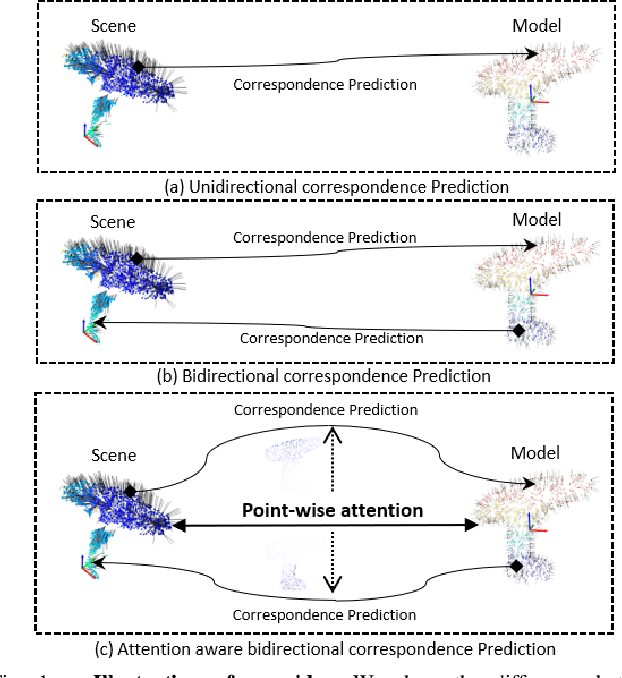
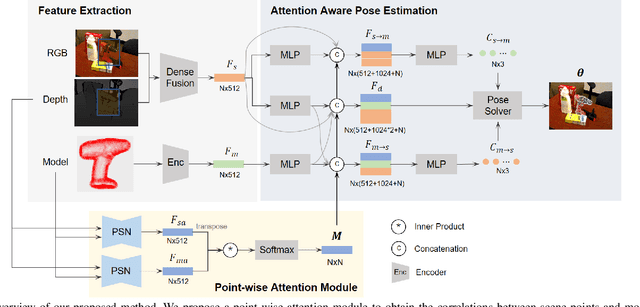
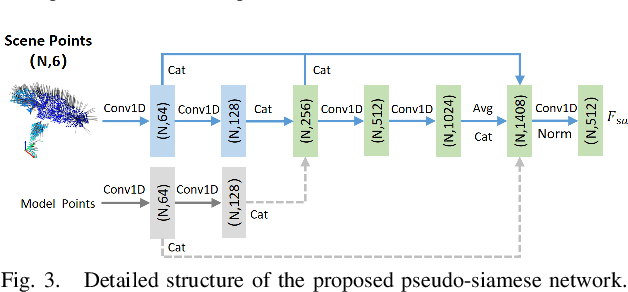
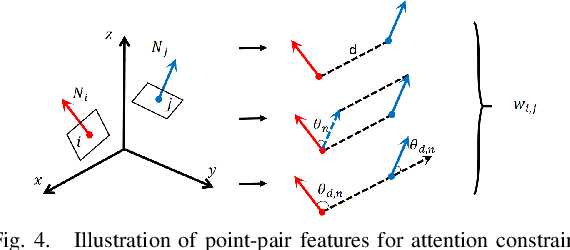
Traditional geometric registration based estimation methods only exploit the CAD model implicitly, which leads to their dependence on observation quality and deficiency to occlusion. To address the problem,the paper proposes a bidirectional correspondence prediction network with a point-wise attention-aware mechanism. This network not only requires the model points to predict the correspondence but also explicitly models the geometric similarities between observations and the model prior. Our key insight is that the correlations between each model point and scene point provide essential information for learning point-pair matches. To further tackle the correlation noises brought by feature distribution divergence, we design a simple but effective pseudo-siamese network to improve feature homogeneity. Experimental results on the public datasets of LineMOD, YCB-Video, and Occ-LineMOD show that the proposed method achieves better performance than other state-of-the-art methods under the same evaluation criteria. Its robustness in estimating poses is greatly improved, especially in an environment with severe occlusions.
The Unreasonable Effectiveness of Large Language-Vision Models for Source-free Video Domain Adaptation
Aug 17, 2023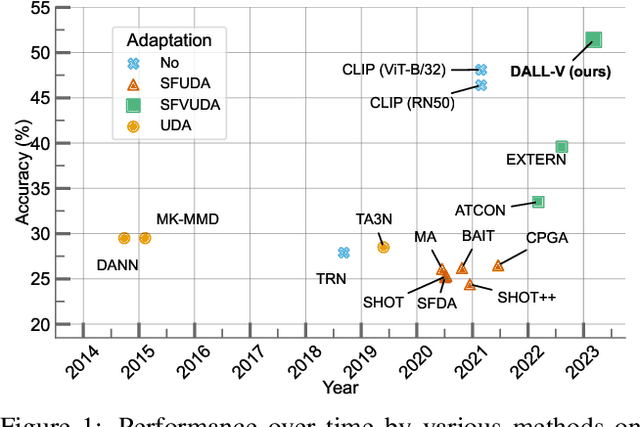
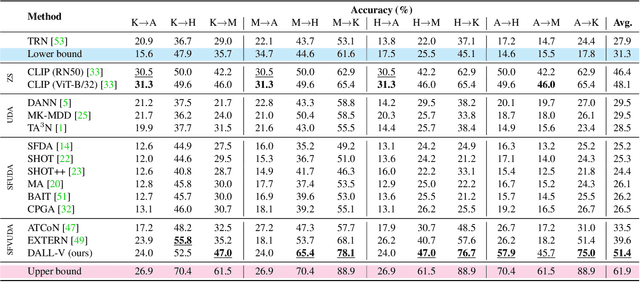
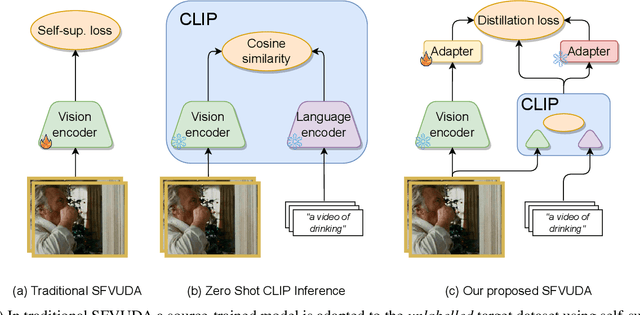
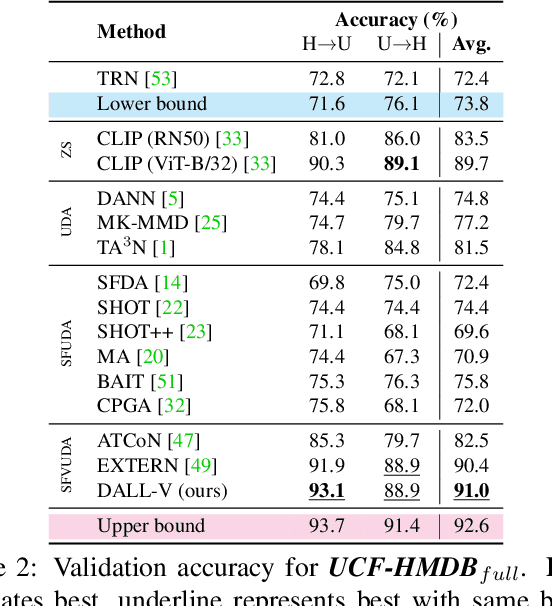
Source-Free Video Unsupervised Domain Adaptation (SFVUDA) methods consists in the task of adapting an action recognition model, trained on a labelled source dataset, to an unlabelled target dataset, without accessing the actual source data. Previous approaches have attempted to address SFVUDA by leveraging self-supervision (e.g., enforcing temporal consistency) derived from the target data itself. In this work we take an orthogonal approach by exploiting "web-supervision" from Large Language-Vision Models (LLVMs), driven by the rationale that LLVMs contain rich world prior, which is surprisingly robust to domain-shift. We showcase the unreasonable effectiveness of integrating LLVMs for SFVUDA by devising an intuitive and parameter efficient method, which we name as Domain Adaptation with Large Language-Vision models (DALL-V), that distills the world prior and complementary source model information into a student network tailored for the target. Despite the simplicity, DALL-V achieves significant improvement over state-of-the-art SFVUDA methods.
SDDNet: Style-guided Dual-layer Disentanglement Network for Shadow Detection
Aug 17, 2023
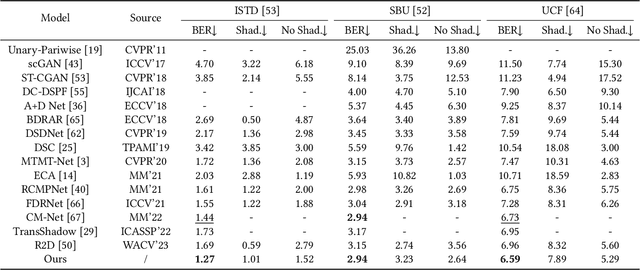
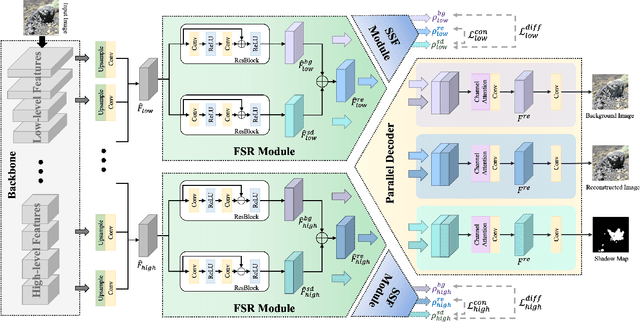
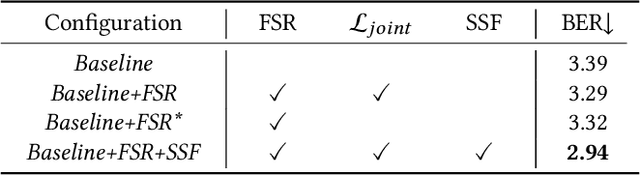
Despite significant progress in shadow detection, current methods still struggle with the adverse impact of background color, which may lead to errors when shadows are present on complex backgrounds. Drawing inspiration from the human visual system, we treat the input shadow image as a composition of a background layer and a shadow layer, and design a Style-guided Dual-layer Disentanglement Network (SDDNet) to model these layers independently. To achieve this, we devise a Feature Separation and Recombination (FSR) module that decomposes multi-level features into shadow-related and background-related components by offering specialized supervision for each component, while preserving information integrity and avoiding redundancy through the reconstruction constraint. Moreover, we propose a Shadow Style Filter (SSF) module to guide the feature disentanglement by focusing on style differentiation and uniformization. With these two modules and our overall pipeline, our model effectively minimizes the detrimental effects of background color, yielding superior performance on three public datasets with a real-time inference speed of 32 FPS.
Toward Fine Contact Interactions: Learning to Control Normal Contact Force with Limited Information
May 29, 2023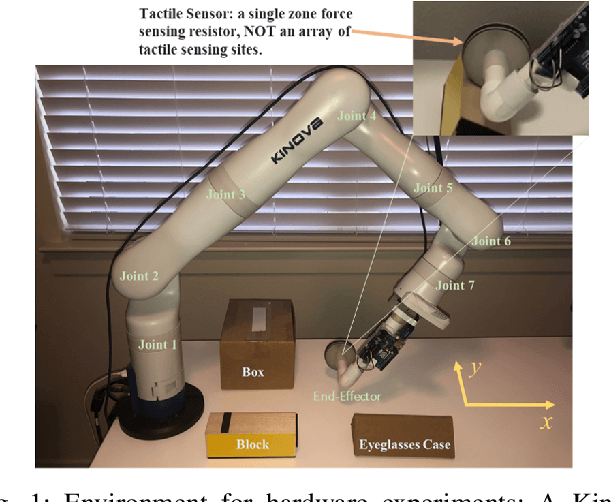
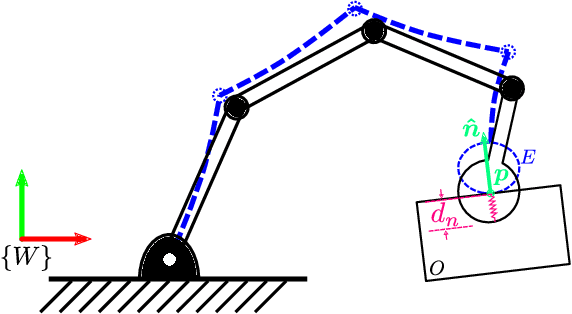
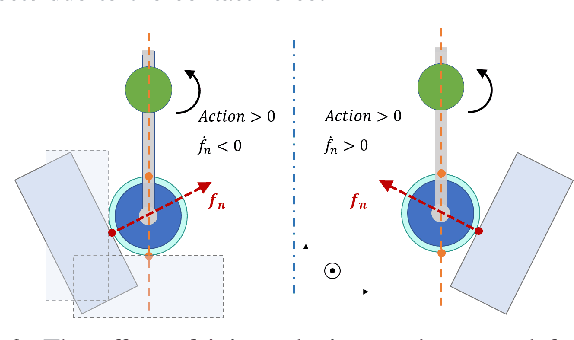
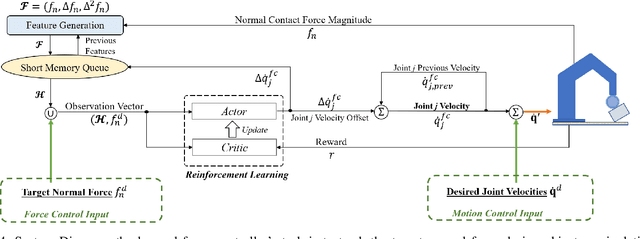
Dexterous manipulation of objects through fine control of physical contacts is essential for many important tasks of daily living. A fundamental ability underlying fine contact control is compliant control, \textit{i.e.}, controlling the contact forces while moving. For robots, the most widely explored approaches heavily depend on models of manipulated objects and expensive sensors to gather contact location and force information needed for real-time control. The models are difficult to obtain, and the sensors are costly, hindering personal robots' adoption in our homes and businesses. This study performs model-free reinforcement learning of a normal contact force controller on a robotic manipulation system built with a low-cost, information-poor tactile sensor. Despite the limited sensing capability, our force controller can be combined with a motion controller to enable fine contact interactions during object manipulation. Promising results are demonstrated in non-prehensile, dexterous manipulation experiments.
MapNeRF: Incorporating Map Priors into Neural Radiance Fields for Driving View Simulation
Aug 06, 2023Simulating camera sensors is a crucial task in autonomous driving. Although neural radiance fields are exceptional at synthesizing photorealistic views in driving simulations, they still fail to generate extrapolated views. This paper proposes to incorporate map priors into neural radiance fields to synthesize out-of-trajectory driving views with semantic road consistency. The key insight is that map information can be utilized as a prior to guiding the training of the radiance fields with uncertainty. Specifically, we utilize the coarse ground surface as uncertain information to supervise the density field and warp depth with uncertainty from unknown camera poses to ensure multi-view consistency. Experimental results demonstrate that our approach can produce semantic consistency in deviated views for vehicle camera simulation. The supplementary video can be viewed at https://youtu.be/jEQWr-Rfh3A.
Open Information Extraction via Chunks
May 05, 2023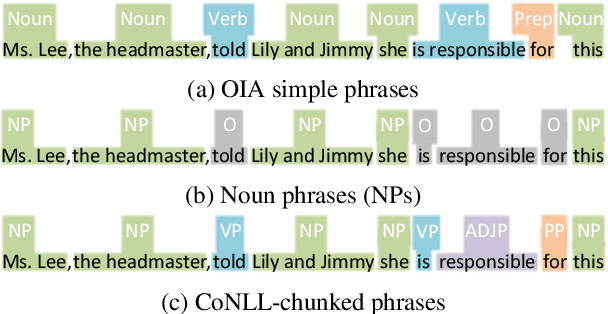
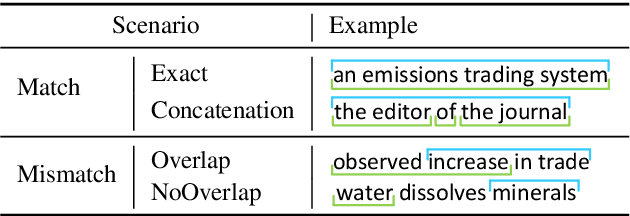
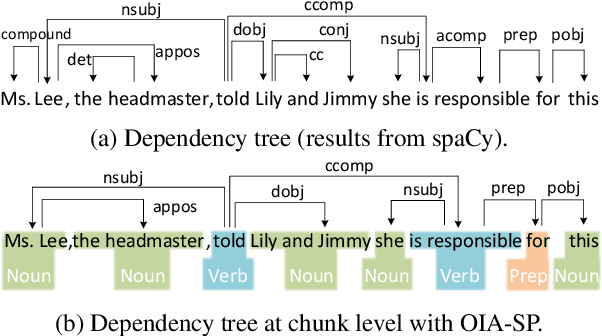
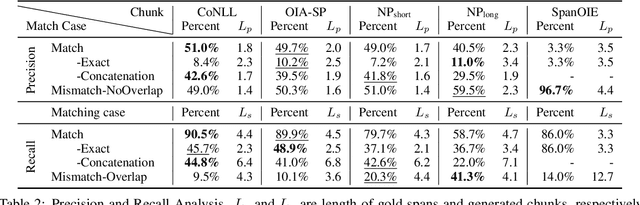
Open Information Extraction (OIE) aims to extract relational tuples from open-domain sentences. Existing OIE systems split a sentence into tokens and recognize token spans as tuple relations and arguments. We instead propose Sentence as Chunk sequence (SaC) and recognize chunk spans as tuple relations and arguments. We argue that SaC has better quantitative and qualitative properties for OIE than sentence as token sequence, and evaluate four choices of chunks (i.e., CoNLL chunks, simple phrases, NP chunks, and spans from SpanOIE) against gold OIE tuples. Accordingly, we propose a simple BERT-based model for sentence chunking, and propose Chunk-OIE for tuple extraction on top of SaC. Chunk-OIE achieves state-of-the-art results on multiple OIE datasets, showing that SaC benefits OIE task.
Information Screening whilst Exploiting! Multimodal Relation Extraction with Feature Denoising and Multimodal Topic Modeling
May 19, 2023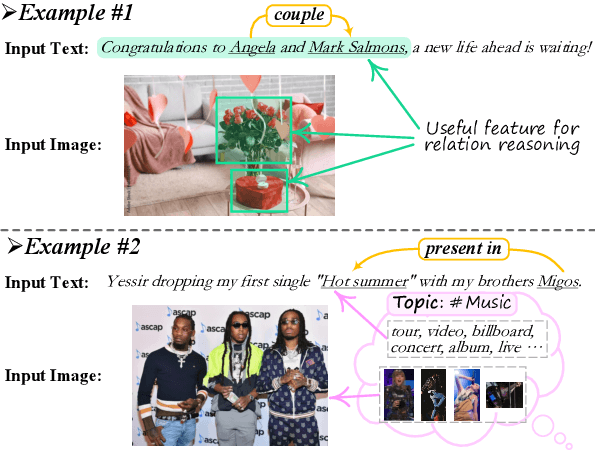
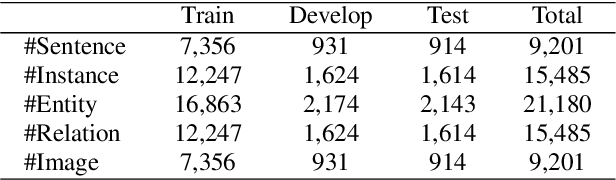
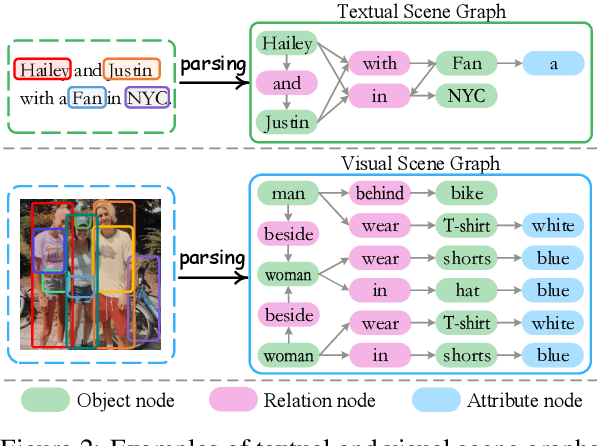
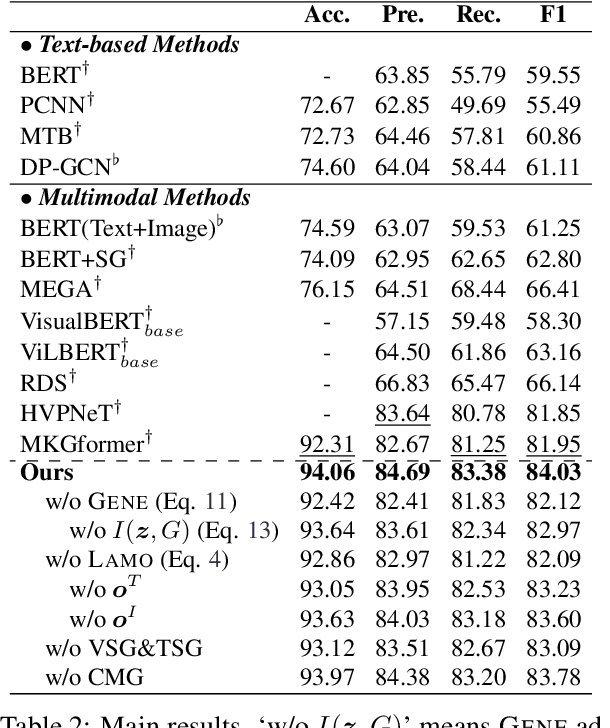
Existing research on multimodal relation extraction (MRE) faces two co-existing challenges, internal-information over-utilization and external-information under-exploitation. To combat that, we propose a novel framework that simultaneously implements the idea of internal-information screening and external-information exploiting. First, we represent the fine-grained semantic structures of the input image and text with the visual and textual scene graphs, which are further fused into a unified cross-modal graph (CMG). Based on CMG, we perform structure refinement with the guidance of the graph information bottleneck principle, actively denoising the less-informative features. Next, we perform topic modeling over the input image and text, incorporating latent multimodal topic features to enrich the contexts. On the benchmark MRE dataset, our system outperforms the current best model significantly. With further in-depth analyses, we reveal the great potential of our method for the MRE task. Our codes are open at https://github.com/ChocoWu/MRE-ISE.