 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
An End-to-end Food Portion Estimation Framework Based on Shape Reconstruction from Monocular Image
Aug 03, 2023
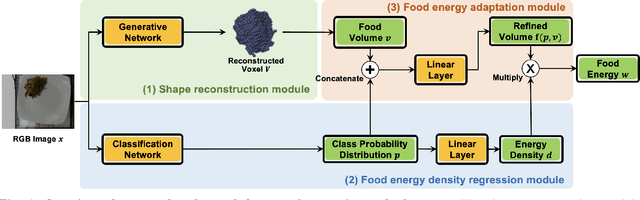
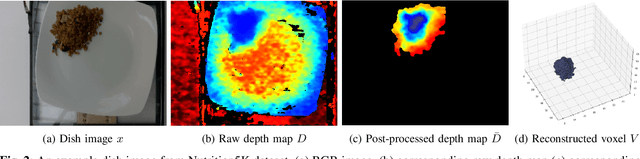

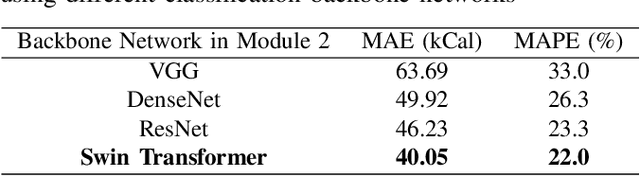
Dietary assessment is a key contributor to monitoring health status. Existing self-report methods are tedious and time-consuming with substantial biases and errors. Image-based food portion estimation aims to estimate food energy values directly from food images, showing great potential for automated dietary assessment solutions. Existing image-based methods either use a single-view image or incorporate multi-view images and depth information to estimate the food energy, which either has limited performance or creates user burdens. In this paper, we propose an end-to-end deep learning framework for food energy estimation from a monocular image through 3D shape reconstruction. We leverage a generative model to reconstruct the voxel representation of the food object from the input image to recover the missing 3D information. Our method is evaluated on a publicly available food image dataset Nutrition5k, resulting a Mean Absolute Error (MAE) of 40.05 kCal and Mean Absolute Percentage Error (MAPE) of 11.47% for food energy estimation. Our method uses RGB image as the only input at the inference stage and achieves competitive results compared to the existing method requiring both RGB and depth information.
GeoDTR+: Toward generic cross-view geolocalization via geometric disentanglement
Aug 18, 2023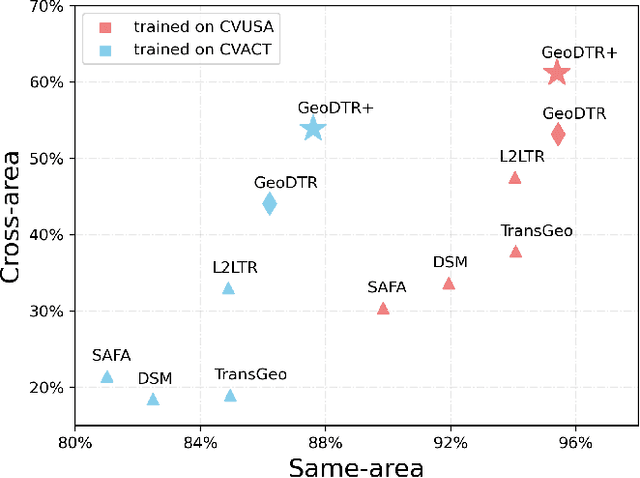
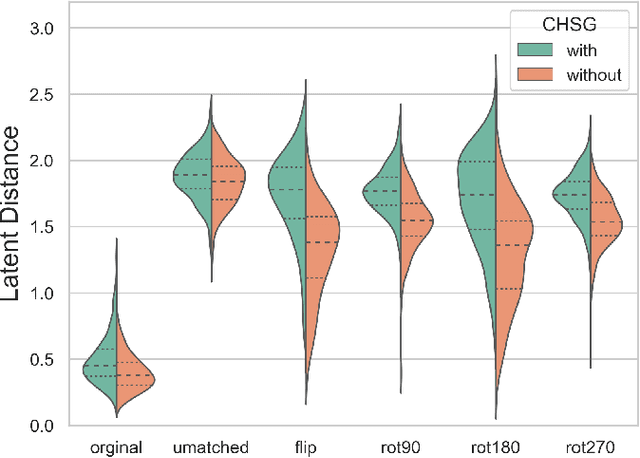
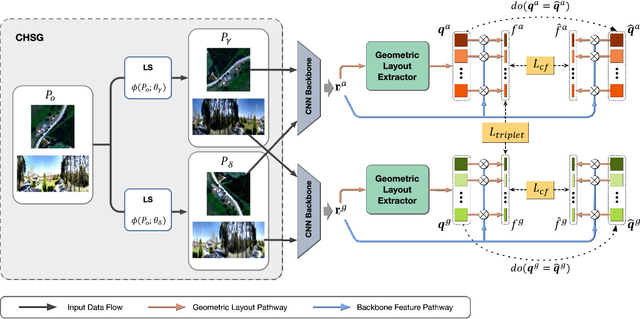
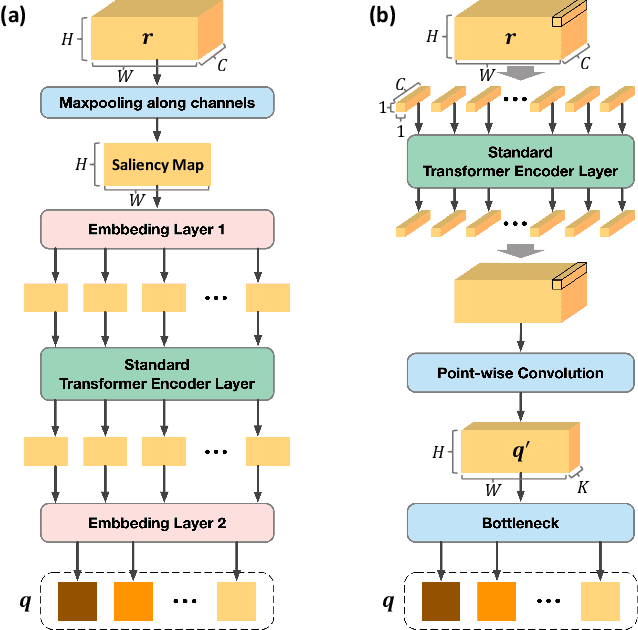
Cross-View Geo-Localization (CVGL) estimates the location of a ground image by matching it to a geo-tagged aerial image in a database. Recent works achieve outstanding progress on CVGL benchmarks. However, existing methods still suffer from poor performance in cross-area evaluation, in which the training and testing data are captured from completely distinct areas. We attribute this deficiency to the lack of ability to extract the geometric layout of visual features and models' overfitting to low-level details. Our preliminary work introduced a Geometric Layout Extractor (GLE) to capture the geometric layout from input features. However, the previous GLE does not fully exploit information in the input feature. In this work, we propose GeoDTR+ with an enhanced GLE module that better models the correlations among visual features. To fully explore the LS techniques from our preliminary work, we further propose Contrastive Hard Samples Generation (CHSG) to facilitate model training. Extensive experiments show that GeoDTR+ achieves state-of-the-art (SOTA) results in cross-area evaluation on CVUSA, CVACT, and VIGOR by a large margin ($16.44\%$, $22.71\%$, and $17.02\%$ without polar transformation) while keeping the same-area performance comparable to existing SOTA. Moreover, we provide detailed analyses of GeoDTR+.
ALIP: Adaptive Language-Image Pre-training with Synthetic Caption
Aug 18, 2023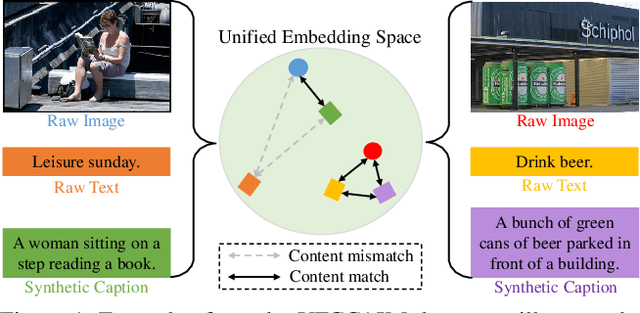
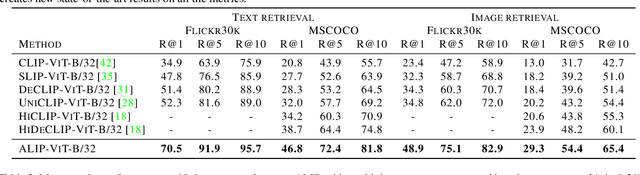
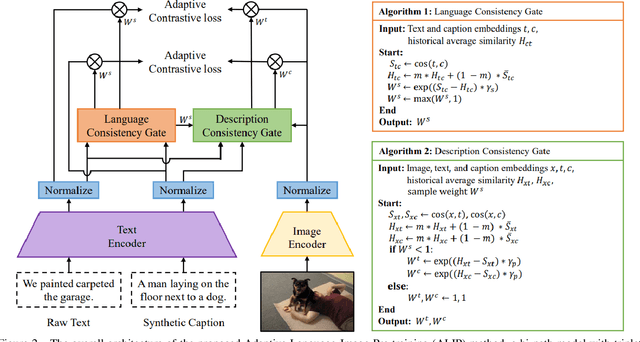
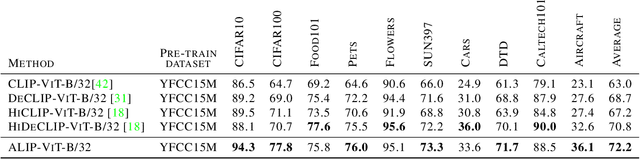
Contrastive Language-Image Pre-training (CLIP) has significantly boosted the performance of various vision-language tasks by scaling up the dataset with image-text pairs collected from the web. However, the presence of intrinsic noise and unmatched image-text pairs in web data can potentially affect the performance of representation learning. To address this issue, we first utilize the OFA model to generate synthetic captions that focus on the image content. The generated captions contain complementary information that is beneficial for pre-training. Then, we propose an Adaptive Language-Image Pre-training (ALIP), a bi-path model that integrates supervision from both raw text and synthetic caption. As the core components of ALIP, the Language Consistency Gate (LCG) and Description Consistency Gate (DCG) dynamically adjust the weights of samples and image-text/caption pairs during the training process. Meanwhile, the adaptive contrastive loss can effectively reduce the impact of noise data and enhances the efficiency of pre-training data. We validate ALIP with experiments on different scales of models and pre-training datasets. Experiments results show that ALIP achieves state-of-the-art performance on multiple downstream tasks including zero-shot image-text retrieval and linear probe. To facilitate future research, the code and pre-trained models are released at https://github.com/deepglint/ALIP.
PUMGPT: A Large Vision-Language Model for Product Understanding
Aug 18, 2023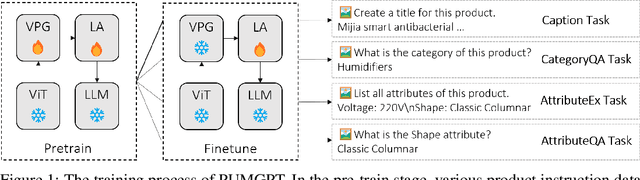
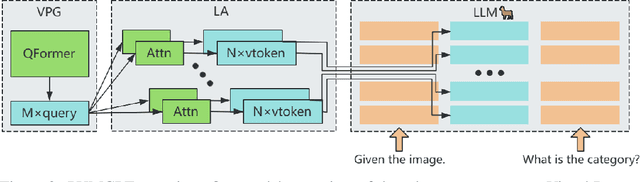
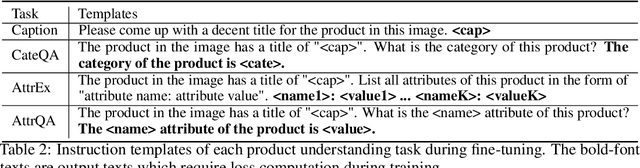
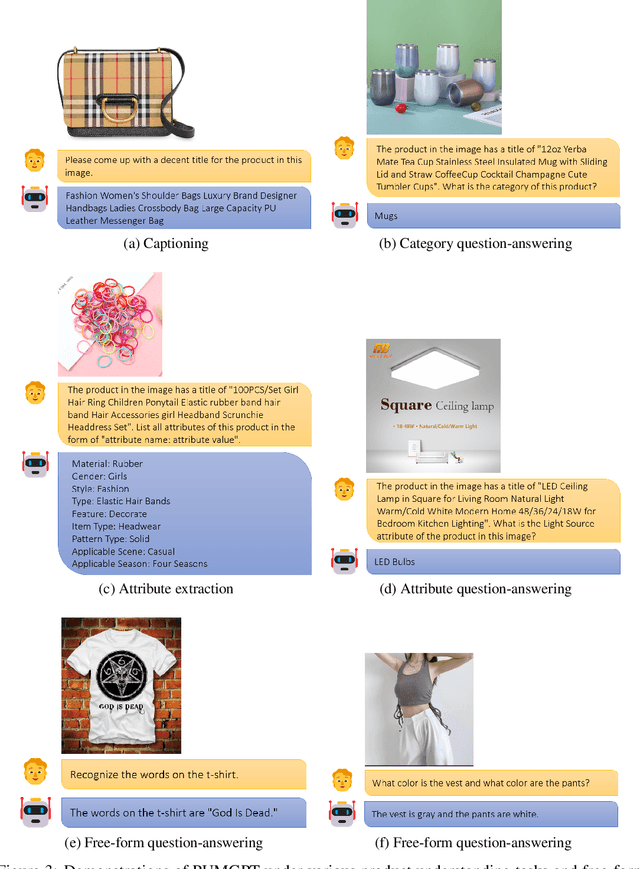
Recent developments of multi-modal large language models have demonstrated its strong ability in solving vision-language tasks. In this paper, we focus on the product understanding task, which plays an essential role in enhancing online shopping experience. Product understanding task includes a variety of sub-tasks, which require models to respond diverse queries based on multi-modal product information. Traditional methods design distinct model architectures for each sub-task. On the contrary, we present PUMGPT, a large vision-language model aims at unifying all product understanding tasks under a singular model structure. To bridge the gap between vision and text representations, we propose Layer-wise Adapters (LA), an approach that provides enhanced alignment with fewer visual tokens and enables parameter-efficient fine-tuning. Moreover, the inherent parameter-efficient fine-tuning ability allows PUMGPT to be readily adapted to new product understanding tasks and emerging products. We design instruction templates to generate diverse product instruction datasets. Simultaneously, we utilize open-domain datasets during training to improve the performance of PUMGPT and its generalization ability. Through extensive evaluations, PUMGPT demonstrates its superior performance across multiple product understanding tasks, including product captioning, category question-answering, attribute extraction, attribute question-answering, and even free-form question-answering about products.
Multi-scale Target-Aware Framework for Constrained Image Splicing Detection and Localization
Aug 18, 2023
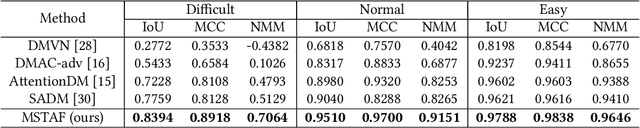
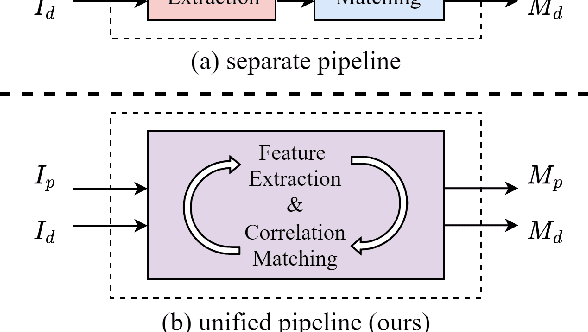
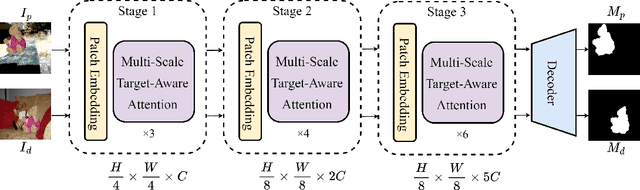
Constrained image splicing detection and localization (CISDL) is a fundamental task of multimedia forensics, which detects splicing operation between two suspected images and localizes the spliced region on both images. Recent works regard it as a deep matching problem and have made significant progress. However, existing frameworks typically perform feature extraction and correlation matching as separate processes, which may hinder the model's ability to learn discriminative features for matching and can be susceptible to interference from ambiguous background pixels. In this work, we propose a multi-scale target-aware framework to couple feature extraction and correlation matching in a unified pipeline. In contrast to previous methods, we design a target-aware attention mechanism that jointly learns features and performs correlation matching between the probe and donor images. Our approach can effectively promote the collaborative learning of related patches, and perform mutual promotion of feature learning and correlation matching. Additionally, in order to handle scale transformations, we introduce a multi-scale projection method, which can be readily integrated into our target-aware framework that enables the attention process to be conducted between tokens containing information of varying scales. Our experiments demonstrate that our model, which uses a unified pipeline, outperforms state-of-the-art methods on several benchmark datasets and is robust against scale transformations.
Bridged-GNN: Knowledge Bridge Learning for Effective Knowledge Transfer
Aug 18, 2023The data-hungry problem, characterized by insufficiency and low-quality of data, poses obstacles for deep learning models. Transfer learning has been a feasible way to transfer knowledge from high-quality external data of source domains to limited data of target domains, which follows a domain-level knowledge transfer to learn a shared posterior distribution. However, they are usually built on strong assumptions, e.g., the domain invariant posterior distribution, which is usually unsatisfied and may introduce noises, resulting in poor generalization ability on target domains. Inspired by Graph Neural Networks (GNNs) that aggregate information from neighboring nodes, we redefine the paradigm as learning a knowledge-enhanced posterior distribution for target domains, namely Knowledge Bridge Learning (KBL). KBL first learns the scope of knowledge transfer by constructing a Bridged-Graph that connects knowledgeable samples to each target sample and then performs sample-wise knowledge transfer via GNNs.KBL is free from strong assumptions and is robust to noises in the source data. Guided by KBL, we propose the Bridged-GNN} including an Adaptive Knowledge Retrieval module to build Bridged-Graph and a Graph Knowledge Transfer module. Comprehensive experiments on both un-relational and relational data-hungry scenarios demonstrate the significant improvements of Bridged-GNN compared with SOTA methods
Physics-Informed Boundary Integral Networks (PIBI-Nets): A Data-Driven Approach for Solving Partial Differential Equations
Aug 18, 2023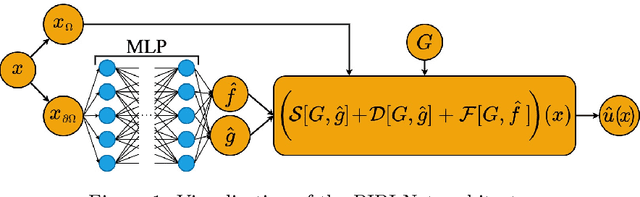
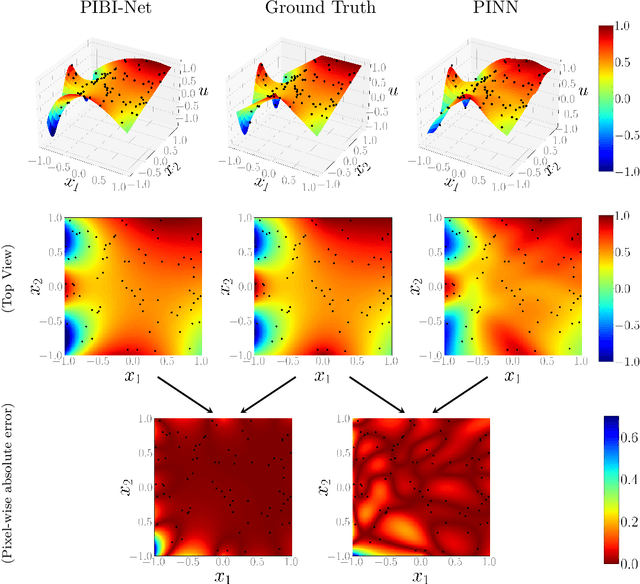
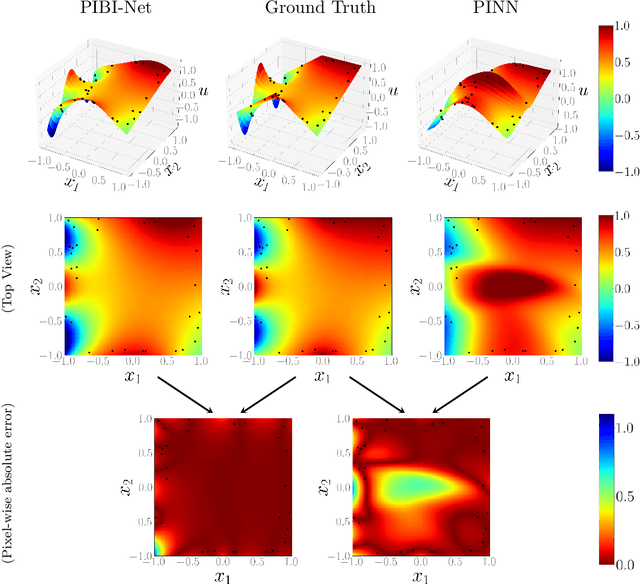
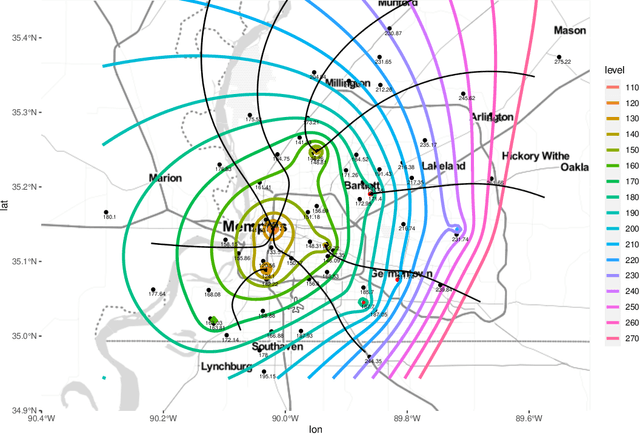
Partial differential equations (PDEs) can describe many relevant phenomena in dynamical systems. In real-world applications, we commonly need to combine formal PDE models with (potentially noisy) observations. This is especially relevant in settings where we lack information about boundary or initial conditions, or where we need to identify unknown model parameters. In recent years, Physics-informed neural networks (PINNs) have become a popular tool for problems of this kind. In high-dimensional settings, however, PINNs often suffer from computational problems because they usually require dense collocation points over the entire computational domain. To address this problem, we present Physics-Informed Boundary Integral Networks (PIBI-Nets) as a data-driven approach for solving PDEs in one dimension less than the original problem space. PIBI-Nets only need collocation points at the computational domain boundary, while still achieving highly accurate results, and in several practical settings, they clearly outperform PINNs. Exploiting elementary properties of fundamental solutions of linear differential operators, we present a principled and simple way to handle point sources in inverse problems. We demonstrate the excellent performance of PIBI-Nets for the Laplace and Poisson equations, both on artificial data sets and within a real-world application concerning the reconstruction of groundwater flows.
PSRFlow: Probabilistic Super Resolution with Flow-Based Models for Scientific Data
Aug 08, 2023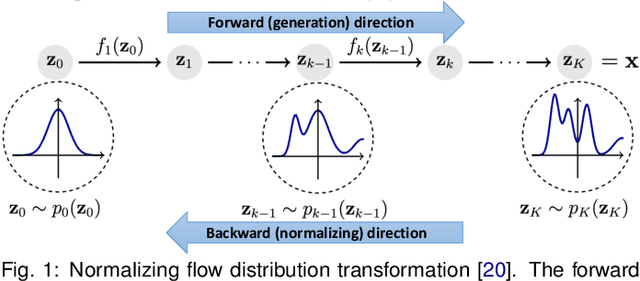
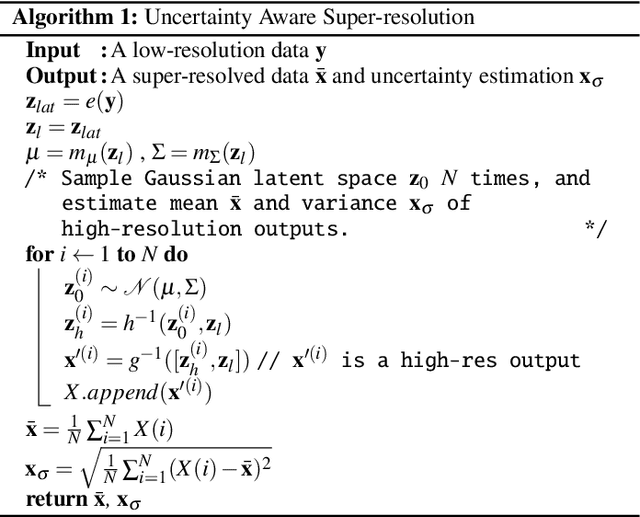
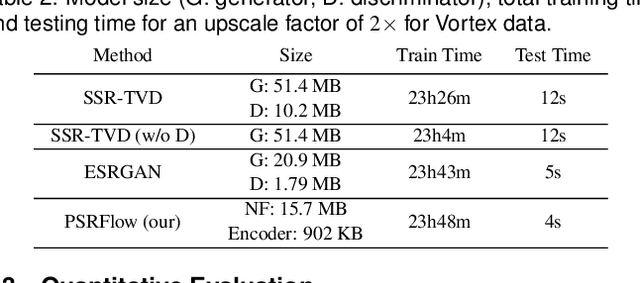
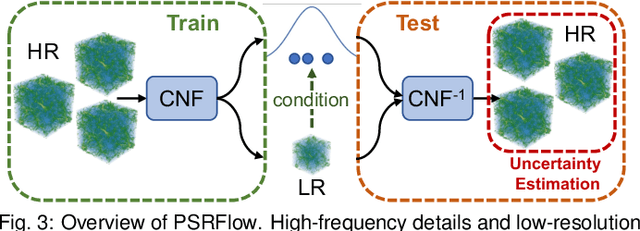
Although many deep-learning-based super-resolution approaches have been proposed in recent years, because no ground truth is available in the inference stage, few can quantify the errors and uncertainties of the super-resolved results. For scientific visualization applications, however, conveying uncertainties of the results to scientists is crucial to avoid generating misleading or incorrect information. In this paper, we propose PSRFlow, a novel normalizing flow-based generative model for scientific data super-resolution that incorporates uncertainty quantification into the super-resolution process. PSRFlow learns the conditional distribution of the high-resolution data based on the low-resolution counterpart. By sampling from a Gaussian latent space that captures the missing information in the high-resolution data, one can generate different plausible super-resolution outputs. The efficient sampling in the Gaussian latent space allows our model to perform uncertainty quantification for the super-resolved results. During model training, we augment the training data with samples across various scales to make the model adaptable to data of different scales, achieving flexible super-resolution for a given input. Our results demonstrate superior performance and robust uncertainty quantification compared with existing methods such as interpolation and GAN-based super-resolution networks.
Extraction of Road Users' Behavior From Realistic Data According to Assumptions in Safety-Related Models for Automated Driving Systems
Jul 31, 2023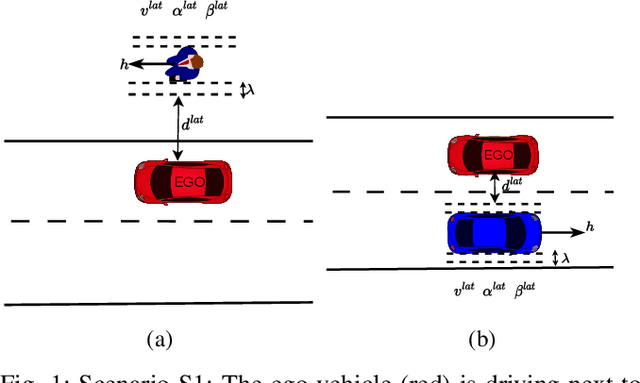
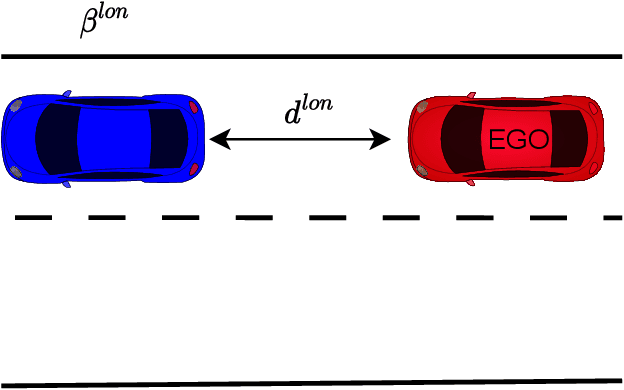
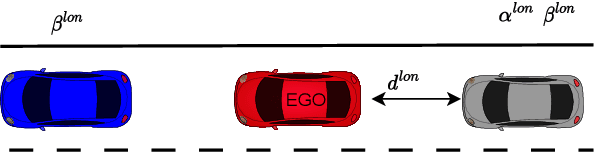
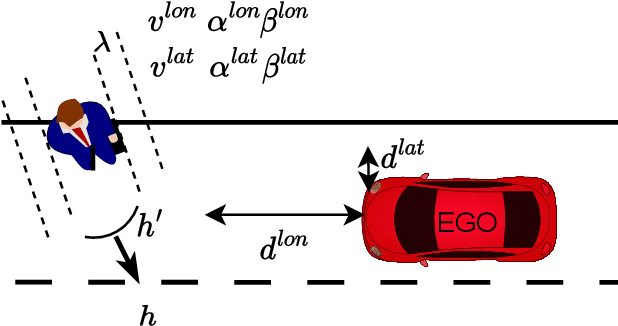
In this work, we utilized the methodology outlined in the IEEE Standard 2846-2022 for "Assumptions in Safety-Related Models for Automated Driving Systems" to extract information on the behavior of other road users in driving scenarios. This method includes defining high-level scenarios, determining kinematic characteristics, evaluating safety relevance, and making assumptions on reasonably predictable behaviors. The assumptions were expressed as kinematic bounds. The numerical values for these bounds were extracted using Python scripts to process realistic data from the UniD dataset. The resulting information enables Automated Driving Systems designers to specify the parameters and limits of a road user's state in a specific scenario. This information can be utilized to establish starting conditions for testing a vehicle that is equipped with an Automated Driving System in simulations or on actual roads.
DDG-Net: Discriminability-Driven Graph Network for Weakly-supervised Temporal Action Localization
Aug 07, 2023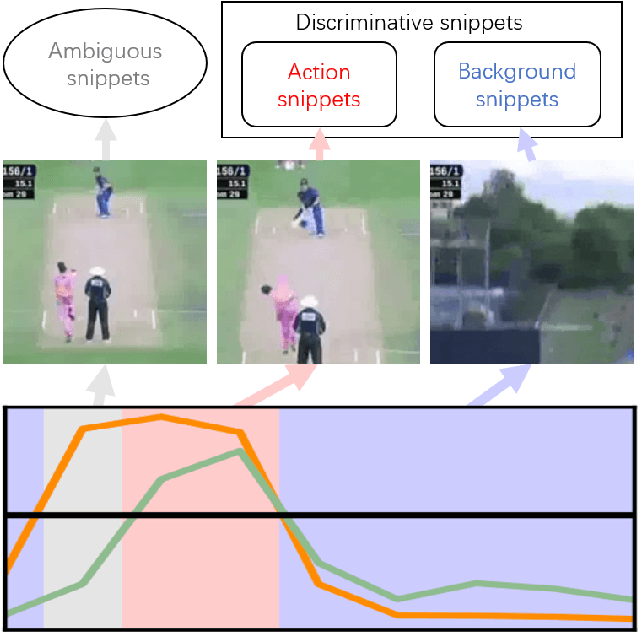
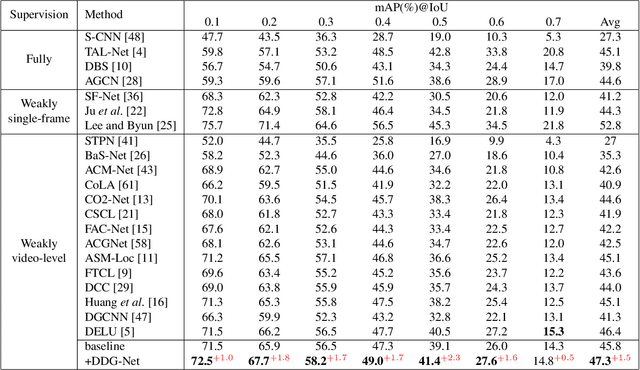
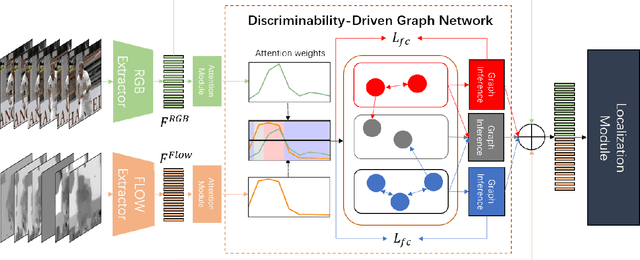
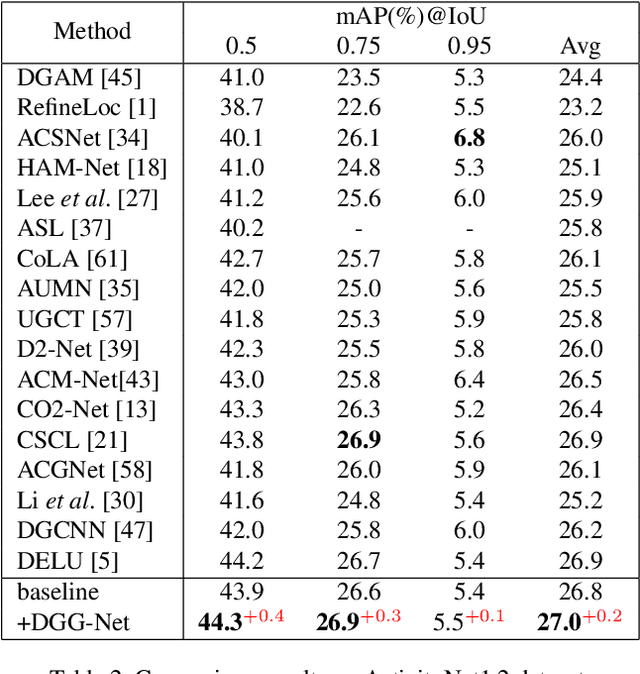
Weakly-supervised temporal action localization (WTAL) is a practical yet challenging task. Due to large-scale datasets, most existing methods use a network pretrained in other datasets to extract features, which are not suitable enough for WTAL. To address this problem, researchers design several modules for feature enhancement, which improve the performance of the localization module, especially modeling the temporal relationship between snippets. However, all of them neglect the adverse effects of ambiguous information, which would reduce the discriminability of others. Considering this phenomenon, we propose Discriminability-Driven Graph Network (DDG-Net), which explicitly models ambiguous snippets and discriminative snippets with well-designed connections, preventing the transmission of ambiguous information and enhancing the discriminability of snippet-level representations. Additionally, we propose feature consistency loss to prevent the assimilation of features and drive the graph convolution network to generate more discriminative representations. Extensive experiments on THUMOS14 and ActivityNet1.2 benchmarks demonstrate the effectiveness of DDG-Net, establishing new state-of-the-art results on both datasets. Source code is available at \url{https://github.com/XiaojunTang22/ICCV2023-DDGNet}.