 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
osmAG: Hierarchical Semantic Topometric Area Graph Maps in the OSM Format for Mobile Robotics
Sep 09, 2023
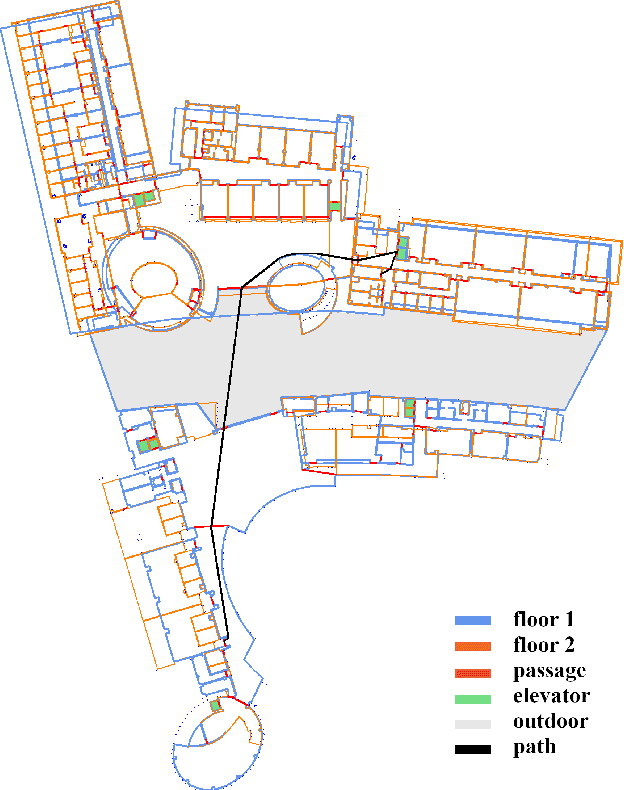
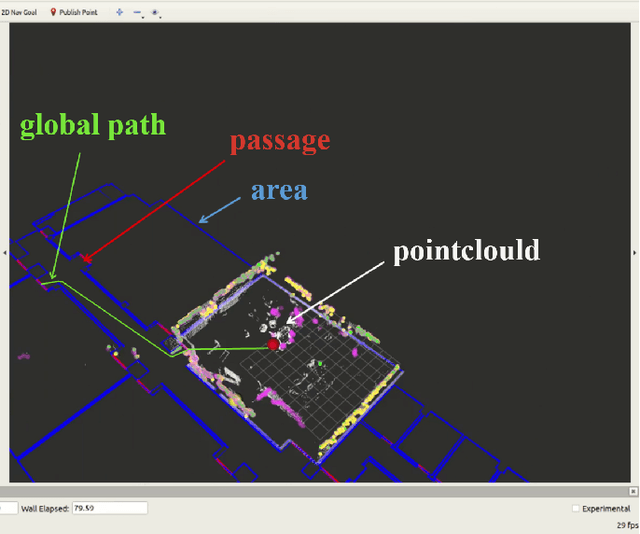
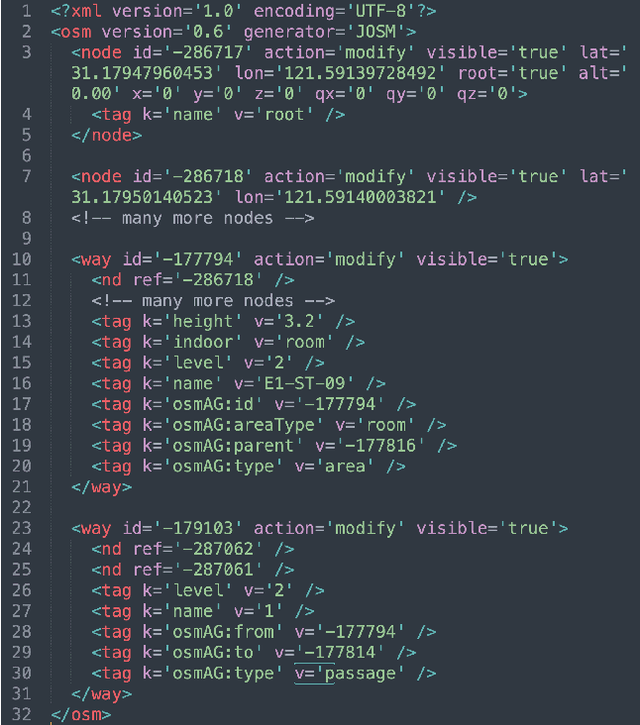
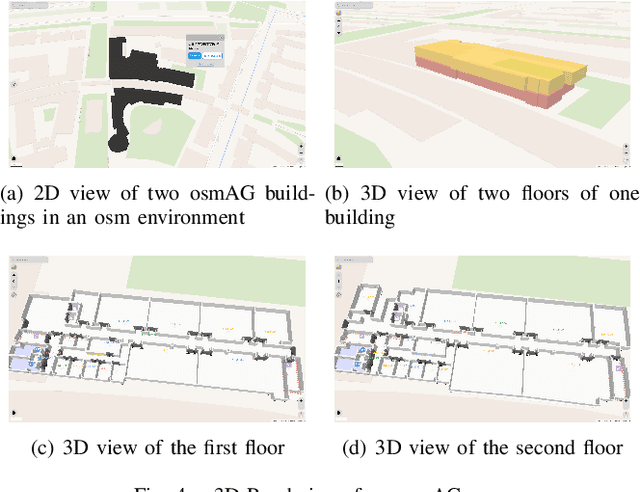
Maps are essential to mobile robotics tasks like localization and planning. We propose the open street map (osm) XML based Area Graph file format to store hierarchical, topometric semantic multi-floor maps of indoor and outdoor environments, since currently no such format is popular within the robotics community. Building on-top of osm we leverage the available open source editing tools and libraries of osm, while adding the needed mobile robotics aspect with building-level obstacle representation yet very compact, topometric data that facilitates planning algorithms. Through the use of common osm keys as well as custom ones we leverage the power of semantic annotation to enable various applications. For example, we support planning based on robot capabilities, to take the locomotion mode and attributes in conjunction with the environment information into account. The provided C++ library is integrated into ROS. We evaluate the performance of osmAG using real data in a global path planning application on a very big osmAG map, demonstrating its convenience and effectiveness for mobile robots.
Selection of contributing factors for predicting landslide susceptibility using machine learning and deep learning models
Sep 13, 2023Landslides are a common natural disaster that can cause casualties, property safety threats and economic losses. Therefore, it is important to understand or predict the probability of landslide occurrence at potentially risky sites. A commonly used means is to carry out a landslide susceptibility assessment based on a landslide inventory and a set of landslide contributing factors. This can be readily achieved using machine learning (ML) models such as logistic regression (LR), support vector machine (SVM), random forest (RF), extreme gradient boosting (Xgboost), or deep learning (DL) models such as convolutional neural network (CNN) and long short time memory (LSTM). As the input data for these models, landslide contributing factors have varying influences on landslide occurrence. Therefore, it is logically feasible to select more important contributing factors and eliminate less relevant ones, with the aim of increasing the prediction accuracy of these models. However, selecting more important factors is still a challenging task and there is no generally accepted method. Furthermore, the effects of factor selection using various methods on the prediction accuracy of ML and DL models are unclear. In this study, the impact of the selection of contributing factors on the accuracy of landslide susceptibility predictions using ML and DL models was investigated. Four methods for selecting contributing factors were considered for all the aforementioned ML and DL models, which included Information Gain Ratio (IGR), Recursive Feature Elimination (RFE), Particle Swarm Optimization (PSO), Least Absolute Shrinkage and Selection Operators (LASSO) and Harris Hawk Optimization (HHO). In addition, autoencoder-based factor selection methods for DL models were also investigated. To assess their performances, an exhaustive approach was adopted,...
When Are Two Lists Better than One?: Benefits and Harms in Joint Decision-making
Sep 13, 2023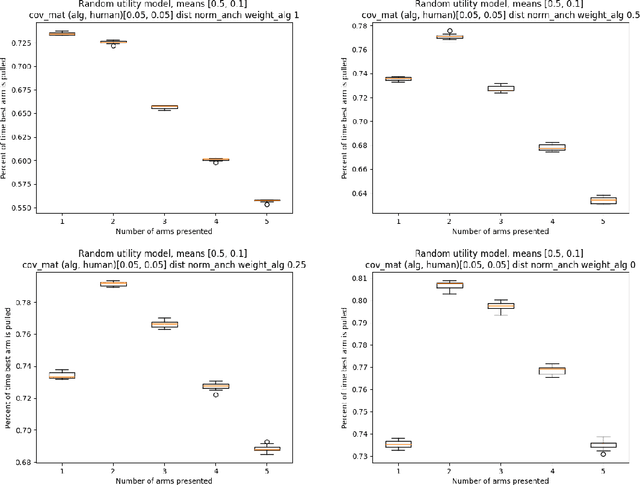
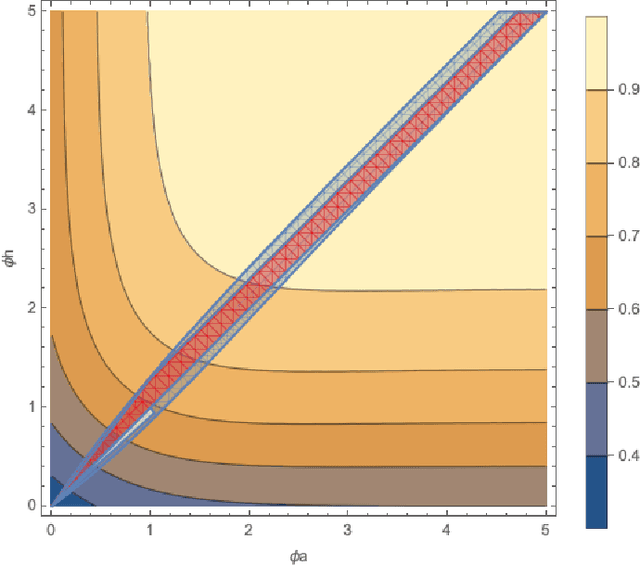
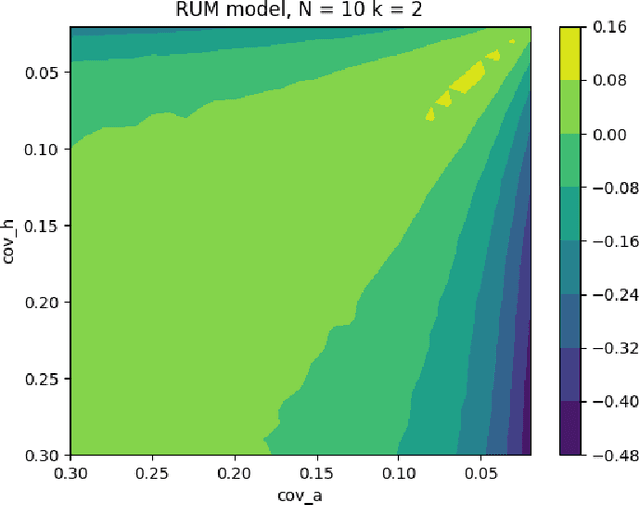
Historically, much of machine learning research has focused on the performance of the algorithm alone, but recently more attention has been focused on optimizing joint human-algorithm performance. Here, we analyze a specific type of human-algorithm collaboration where the algorithm has access to a set of $n$ items, and presents a subset of size $k$ to the human, who selects a final item from among those $k$. This scenario could model content recommendation, route planning, or any type of labeling task. Because both the human and algorithm have imperfect, noisy information about the true ordering of items, the key question is: which value of $k$ maximizes the probability that the best item will be ultimately selected? For $k=1$, performance is optimized by the algorithm acting alone, and for $k=n$ it is optimized by the human acting alone. Surprisingly, we show that for multiple of noise models, it is optimal to set $k \in [2, n-1]$ - that is, there are strict benefits to collaborating, even when the human and algorithm have equal accuracy separately. We demonstrate this theoretically for the Mallows model and experimentally for the Random Utilities models of noisy permutations. However, we show this pattern is reversed when the human is anchored on the algorithm's presented ordering - the joint system always has strictly worse performance. We extend these results to the case where the human and algorithm differ in their accuracy levels, showing that there always exist regimes where a more accurate agent would strictly benefit from collaborating with a less accurate one, but these regimes are asymmetric between the human and the algorithm's accuracy.
FedCiR: Client-Invariant Representation Learning for Federated Non-IID Features
Aug 30, 2023Federated learning (FL) is a distributed learning paradigm that maximizes the potential of data-driven models for edge devices without sharing their raw data. However, devices often have non-independent and identically distributed (non-IID) data, meaning their local data distributions can vary significantly. The heterogeneity in input data distributions across devices, commonly referred to as the feature shift problem, can adversely impact the training convergence and accuracy of the global model. To analyze the intrinsic causes of the feature shift problem, we develop a generalization error bound in FL, which motivates us to propose FedCiR, a client-invariant representation learning framework that enables clients to extract informative and client-invariant features. Specifically, we improve the mutual information term between representations and labels to encourage representations to carry essential classification knowledge, and diminish the mutual information term between the client set and representations conditioned on labels to promote representations of clients to be client-invariant. We further incorporate two regularizers into the FL framework to bound the mutual information terms with an approximate global representation distribution to compensate for the absence of the ground-truth global representation distribution, thus achieving informative and client-invariant feature extraction. To achieve global representation distribution approximation, we propose a data-free mechanism performed by the server without compromising privacy. Extensive experiments demonstrate the effectiveness of our approach in achieving client-invariant representation learning and solving the data heterogeneity issue.
Toward Sufficient Spatial-Frequency Interaction for Gradient-aware Underwater Image Enhancement
Sep 08, 2023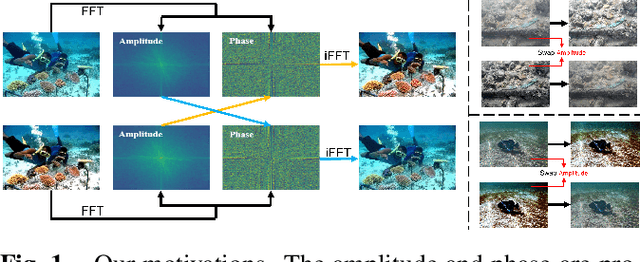
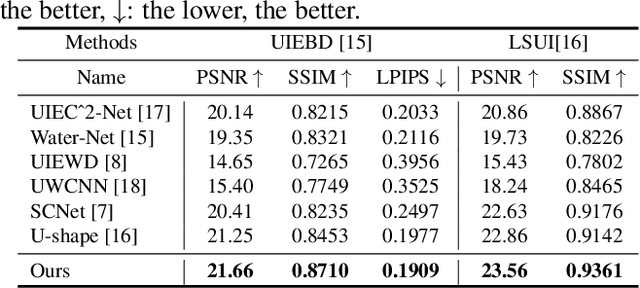
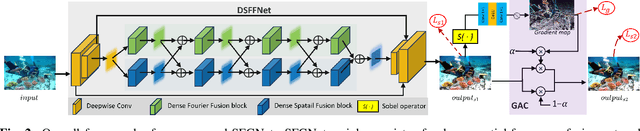
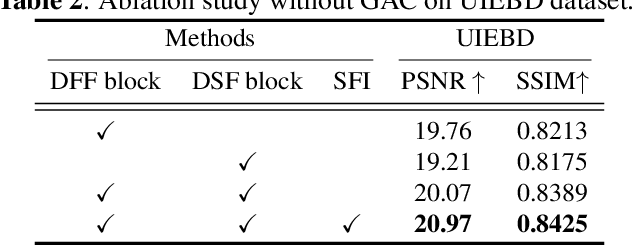
Underwater images suffer from complex and diverse degradation, which inevitably affects the performance of underwater visual tasks. However, most existing learning-based Underwater image enhancement (UIE) methods mainly restore such degradations in the spatial domain, and rarely pay attention to the fourier frequency information. In this paper, we develop a novel UIE framework based on spatial-frequency interaction and gradient maps, namely SFGNet, which consists of two stages. Specifically, in the first stage, we propose a dense spatial-frequency fusion network (DSFFNet), mainly including our designed dense fourier fusion block and dense spatial fusion block, achieving sufficient spatial-frequency interaction by cross connections between these two blocks. In the second stage, we propose a gradient-aware corrector (GAC) to further enhance perceptual details and geometric structures of images by gradient map. Experimental results on two real-world underwater image datasets show that our approach can successfully enhance underwater images, and achieves competitive performance in visual quality improvement.
Enhancing Hyperedge Prediction with Context-Aware Self-Supervised Learning
Sep 11, 2023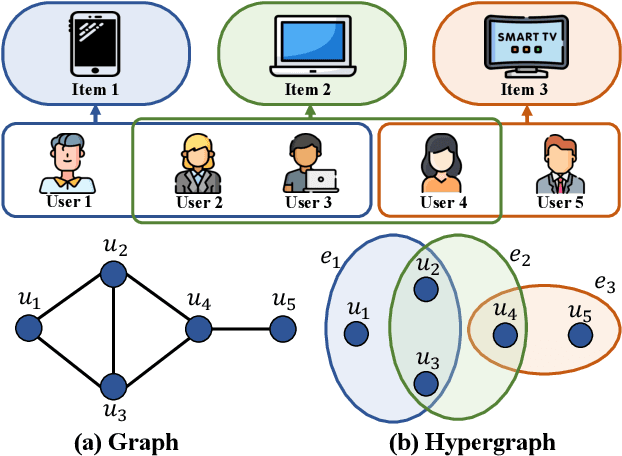
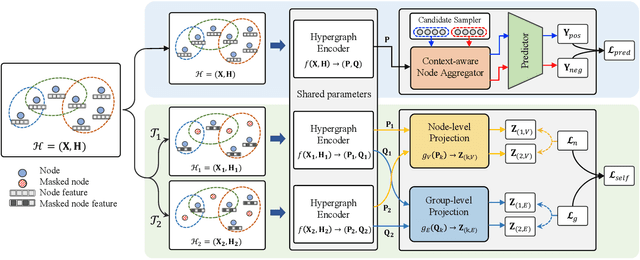
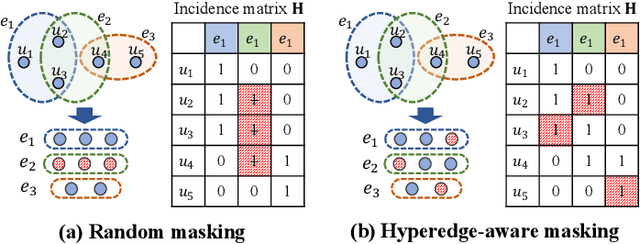
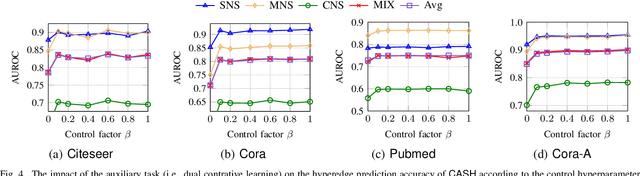
Hypergraphs can naturally model group-wise relations (e.g., a group of users who co-purchase an item) as hyperedges. Hyperedge prediction is to predict future or unobserved hyperedges, which is a fundamental task in many real-world applications (e.g., group recommendation). Despite the recent breakthrough of hyperedge prediction methods, the following challenges have been rarely studied: (C1) How to aggregate the nodes in each hyperedge candidate for accurate hyperedge prediction? and (C2) How to mitigate the inherent data sparsity problem in hyperedge prediction? To tackle both challenges together, in this paper, we propose a novel hyperedge prediction framework (CASH) that employs (1) context-aware node aggregation to precisely capture complex relations among nodes in each hyperedge for (C1) and (2) self-supervised contrastive learning in the context of hyperedge prediction to enhance hypergraph representations for (C2). Furthermore, as for (C2), we propose a hyperedge-aware augmentation method to fully exploit the latent semantics behind the original hypergraph and consider both node-level and group-level contrasts (i.e., dual contrasts) for better node and hyperedge representations. Extensive experiments on six real-world hypergraphs reveal that CASH consistently outperforms all competing methods in terms of the accuracy in hyperedge prediction and each of the proposed strategies is effective in improving the model accuracy of CASH. For the detailed information of CASH, we provide the code and datasets at: https://github.com/yy-ko/cash.
Towards Content-based Pixel Retrieval in Revisited Oxford and Paris
Sep 11, 2023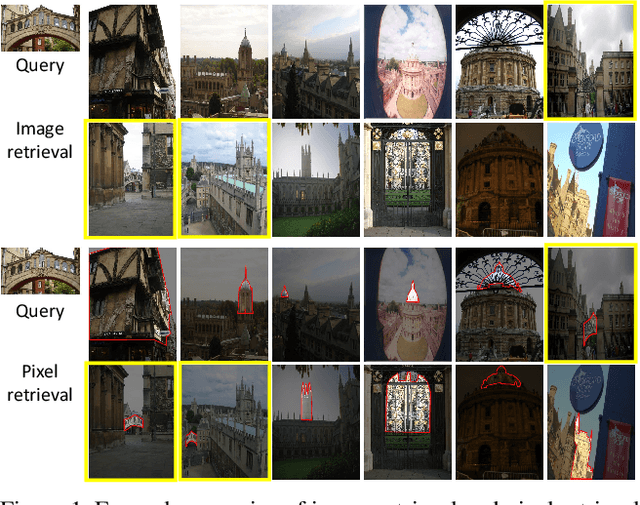
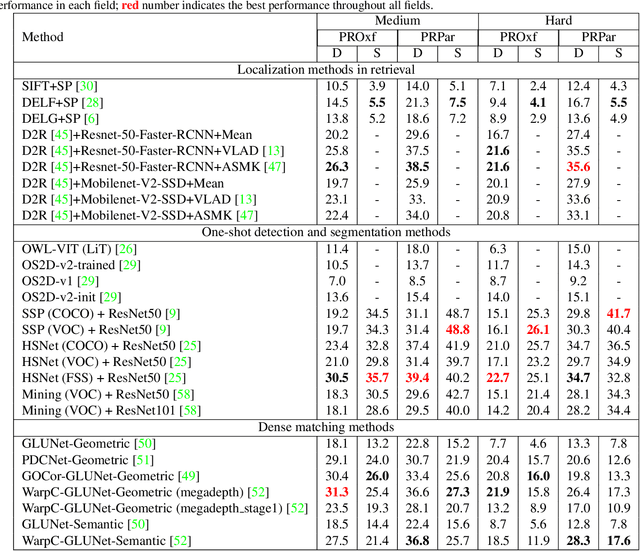
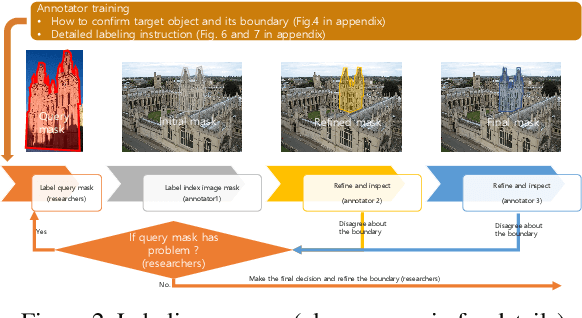
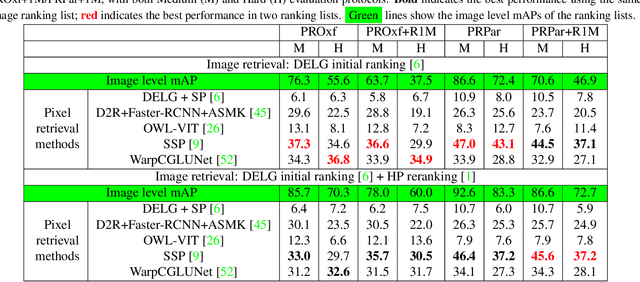
This paper introduces the first two pixel retrieval benchmarks. Pixel retrieval is segmented instance retrieval. Like semantic segmentation extends classification to the pixel level, pixel retrieval is an extension of image retrieval and offers information about which pixels are related to the query object. In addition to retrieving images for the given query, it helps users quickly identify the query object in true positive images and exclude false positive images by denoting the correlated pixels. Our user study results show pixel-level annotation can significantly improve the user experience. Compared with semantic and instance segmentation, pixel retrieval requires a fine-grained recognition capability for variable-granularity targets. To this end, we propose pixel retrieval benchmarks named PROxford and PRParis, which are based on the widely used image retrieval datasets, ROxford and RParis. Three professional annotators label 5,942 images with two rounds of double-checking and refinement. Furthermore, we conduct extensive experiments and analysis on the SOTA methods in image search, image matching, detection, segmentation, and dense matching using our pixel retrieval benchmarks. Results show that the pixel retrieval task is challenging to these approaches and distinctive from existing problems, suggesting that further research can advance the content-based pixel-retrieval and thus user search experience. The datasets can be downloaded from \href{https://github.com/anguoyuan/Pixel_retrieval-Segmented_instance_retrieval}{this link}.
SayNav: Grounding Large Language Models for Dynamic Planning to Navigation in New Environments
Sep 11, 2023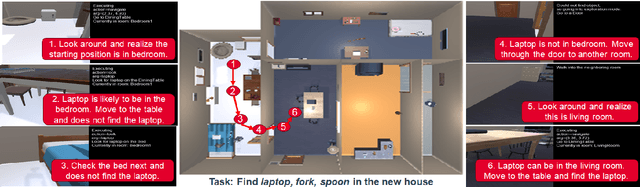
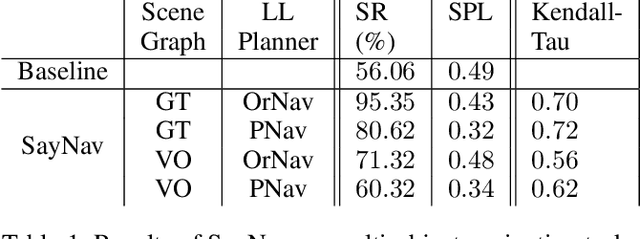
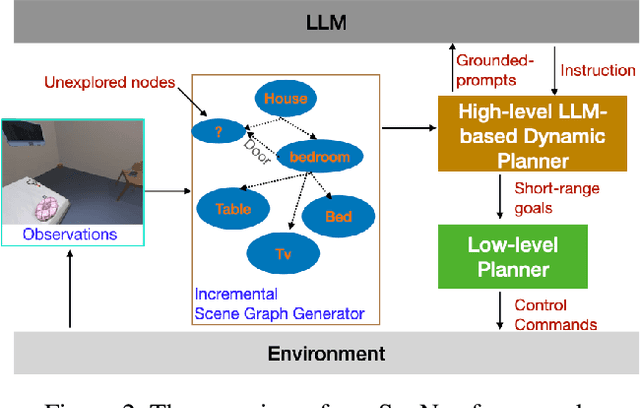
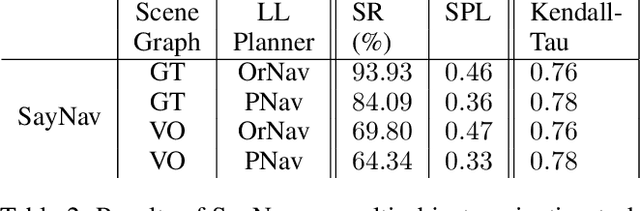
Semantic reasoning and dynamic planning capabilities are crucial for an autonomous agent to perform complex navigation tasks in unknown environments. It requires a large amount of common-sense knowledge, that humans possess, to succeed in these tasks. We present SayNav, a new approach that leverages human knowledge from Large Language Models (LLMs) for efficient generalization to complex navigation tasks in unknown large-scale environments. SayNav uses a novel grounding mechanism, that incrementally builds a 3D scene graph of the explored environment as inputs to LLMs, for generating feasible and contextually appropriate high-level plans for navigation. The LLM-generated plan is then executed by a pre-trained low-level planner, that treats each planned step as a short-distance point-goal navigation sub-task. SayNav dynamically generates step-by-step instructions during navigation and continuously refines future steps based on newly perceived information. We evaluate SayNav on a new multi-object navigation task, that requires the agent to utilize a massive amount of human knowledge to efficiently search multiple different objects in an unknown environment. SayNav outperforms an oracle based Point-nav baseline, achieving a success rate of 95.35% (vs 56.06% for the baseline), under the ideal settings on this task, highlighting its ability to generate dynamic plans for successfully locating objects in large-scale new environments. In addition, SayNav also enables efficient generalization from simulation to real environments.
Large Process Models: Business Process Management in the Age of Generative AI
Sep 11, 2023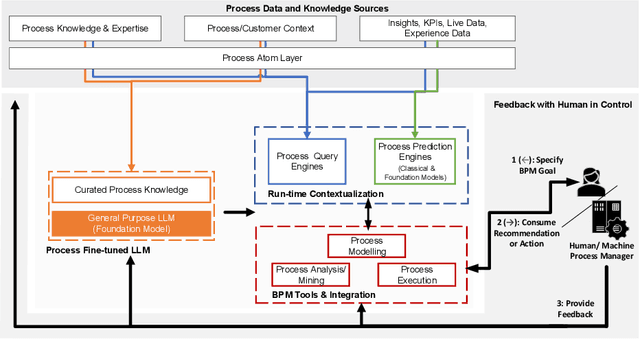
The continued success of Large Language Models (LLMs) and other generative artificial intelligence approaches highlights the advantages that large information corpora can have over rigidly defined symbolic models, but also serves as a proof-point of the challenges that purely statistics-based approaches have in terms of safety and trustworthiness. As a framework for contextualizing the potential, as well as the limitations of LLMs and other foundation model-based technologies, we propose the concept of a Large Process Model (LPM) that combines the correlation power of LLMs with the analytical precision and reliability of knowledge-based systems and automated reasoning approaches. LPMs are envisioned to directly utilize the wealth of process management experience that experts have accumulated, as well as process performance data of organizations with diverse characteristics, e.g., regarding size, region, or industry. In this vision, the proposed LPM would allow organizations to receive context-specific (tailored) process and other business models, analytical deep-dives, and improvement recommendations. As such, they would allow to substantially decrease the time and effort required for business transformation, while also allowing for deeper, more impactful, and more actionable insights than previously possible. We argue that implementing an LPM is feasible, but also highlight limitations and research challenges that need to be solved to implement particular aspects of the LPM vision.
ECG-based estimation of respiratory modulation of AV nodal conduction during atrial fibrillation
Sep 11, 2023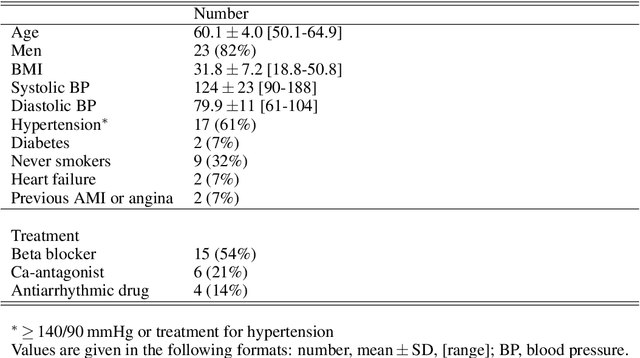
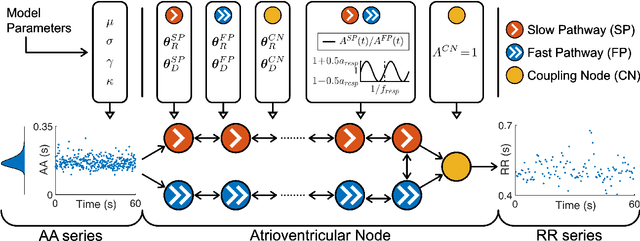
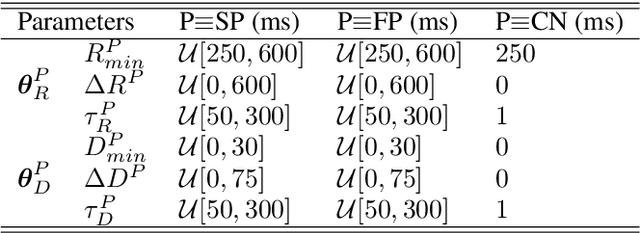
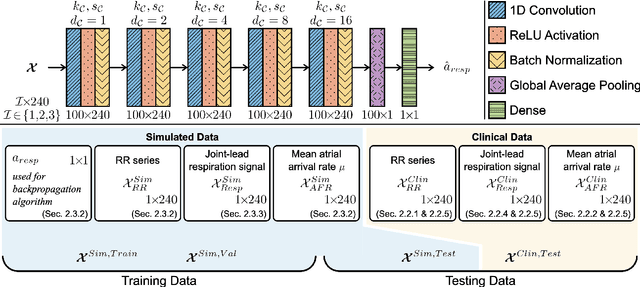
Information about autonomic nervous system (ANS) activity may be valuable for personalized atrial fibrillation (AF) treatment but is not easily accessible from the ECG. In this study, we propose a new approach for ECG-based assessment of respiratory modulation in AV nodal refractory period and conduction delay. A 1-dimensional convolutional neural network (1D-CNN) was trained to estimate respiratory modulation of AV nodal conduction properties from 1-minute segments of RR series, respiration signals, and atrial fibrillatory rates (AFR) using synthetic data that replicates clinical ECG-derived data. The synthetic data were generated using a network model of the AV node and 4 million unique model parameter sets. The 1D-CNN was then used to analyze respiratory modulation in clinical deep breathing test data of 28 patients in AF, where a ECG-derived respiration signal was extracted using a novel approach based on periodic component analysis. We demonstrated using synthetic data that the 1D-CNN can predict the respiratory modulation from RR series alone ($\rho$ = 0.805) and that the addition of either respiration signal ($\rho$ = 0.830), AFR ($\rho$ = 0.837), or both ($\rho$ = 0.855) improves the prediction. Results from analysis of clinical ECG data of 20 patients with sufficient signal quality suggest that respiratory modulation decreased in response to deep breathing for five patients, increased for five patients, and remained similar for ten patients, indicating a large inter-patient variability.