 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
A hybrid approach for improving U-Net variants in medical image segmentation
Jul 31, 2023
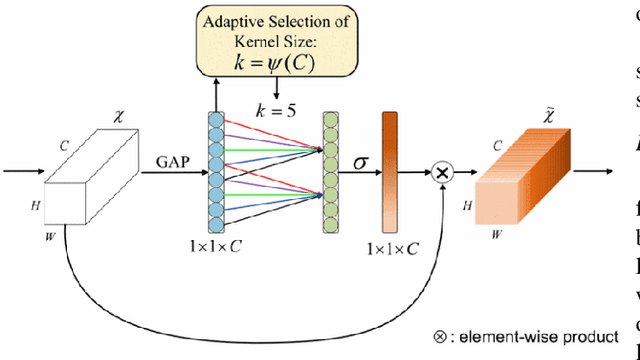
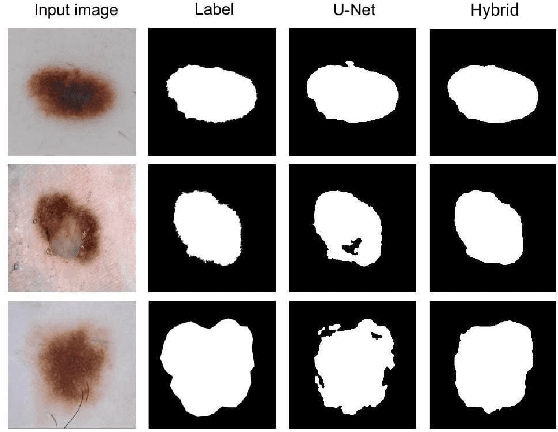
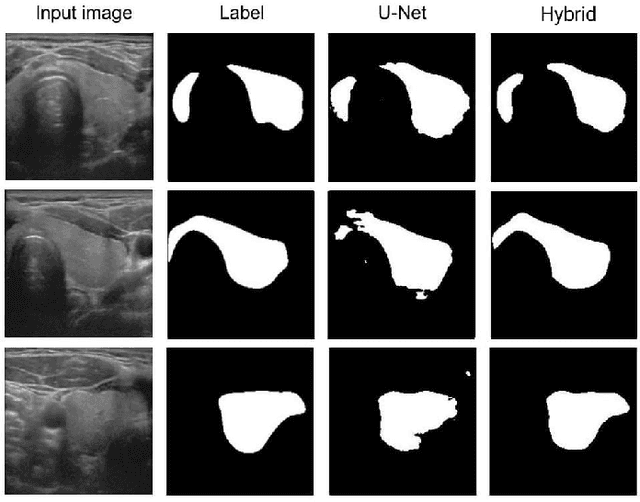
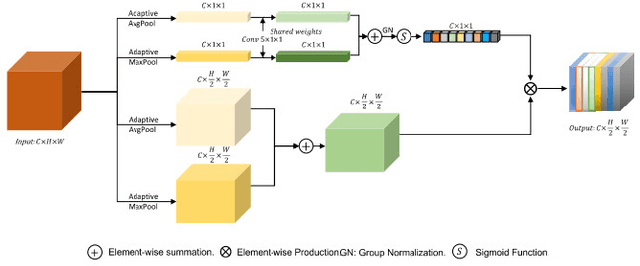
Medical image segmentation is vital to the area of medical imaging because it enables professionals to more accurately examine and understand the information offered by different imaging modalities. The technique of splitting a medical image into various segments or regions of interest is known as medical image segmentation. The segmented images that are produced can be used for many different things, including diagnosis, surgery planning, and therapy evaluation. In initial phase of research, major focus has been given to review existing deep-learning approaches, including researches like MultiResUNet, Attention U-Net, classical U-Net, and other variants. The attention feature vectors or maps dynamically add important weights to critical information, and most of these variants use these to increase accuracy, but the network parameter requirements are somewhat more stringent. They face certain problems such as overfitting, as their number of trainable parameters is very high, and so is their inference time. Therefore, the aim of this research is to reduce the network parameter requirements using depthwise separable convolutions, while maintaining performance over some medical image segmentation tasks such as skin lesion segmentation using attention system and residual connections.
Learning to Transform for Generalizable Instance-wise Invariance
Sep 28, 2023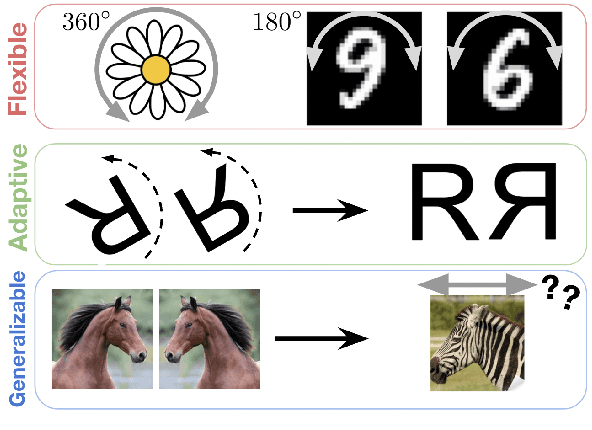
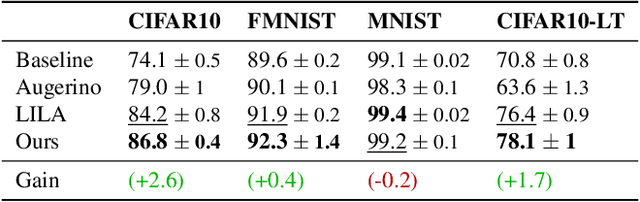
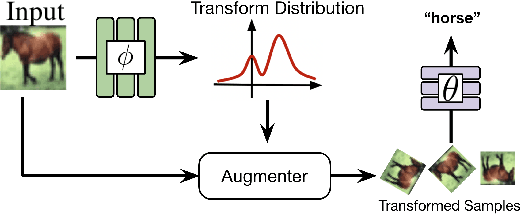
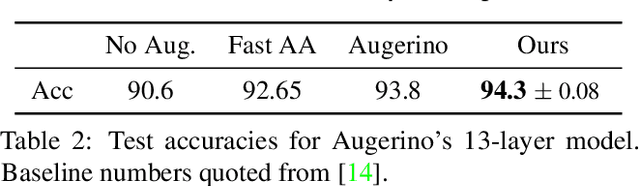
Computer vision research has long aimed to build systems that are robust to spatial transformations found in natural data. Traditionally, this is done using data augmentation or hard-coding invariances into the architecture. However, too much or too little invariance can hurt, and the correct amount is unknown a priori and dependent on the instance. Ideally, the appropriate invariance would be learned from data and inferred at test-time. We treat invariance as a prediction problem. Given any image, we use a normalizing flow to predict a distribution over transformations and average the predictions over them. Since this distribution only depends on the instance, we can align instances before classifying them and generalize invariance across classes. The same distribution can also be used to adapt to out-of-distribution poses. This normalizing flow is trained end-to-end and can learn a much larger range of transformations than Augerino and InstaAug. When used as data augmentation, our method shows accuracy and robustness gains on CIFAR 10, CIFAR10-LT, and TinyImageNet.
Sketch2CADScript: 3D Scene Reconstruction from 2D Sketch using Visual Transformer and Rhino Grasshopper
Sep 28, 2023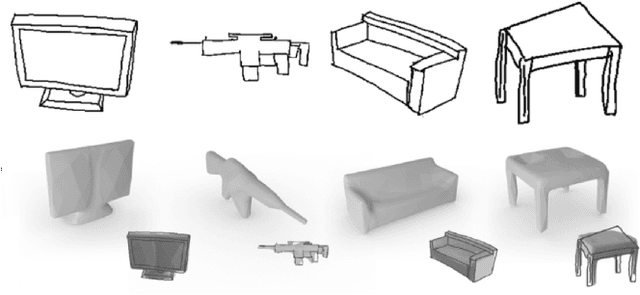
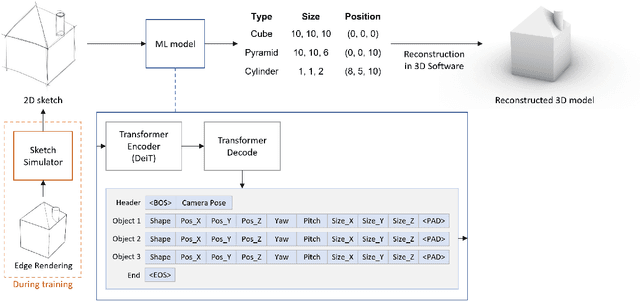
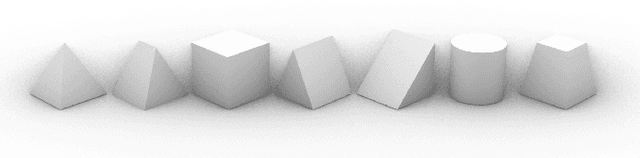
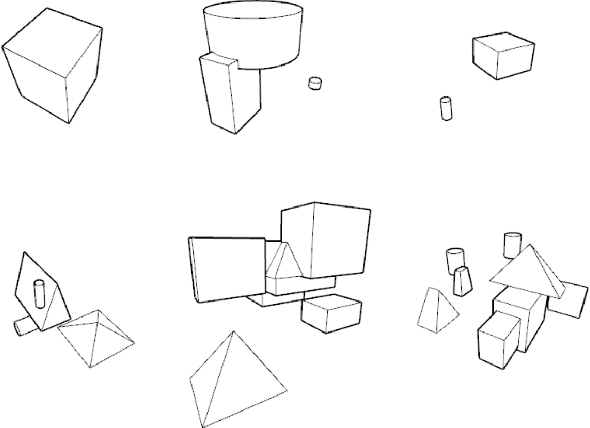
Existing 3D model reconstruction methods typically produce outputs in the form of voxels, point clouds, or meshes. However, each of these approaches has its limitations and may not be suitable for every scenario. For instance, the resulting model may exhibit a rough surface and distorted structure, making manual editing and post-processing challenging for humans. In this paper, we introduce a novel 3D reconstruction method designed to address these issues. We trained a visual transformer to predict a "scene descriptor" from a single wire-frame image. This descriptor encompasses crucial information, including object types and parameters such as position, rotation, and size. With the predicted parameters, a 3D scene can be reconstructed using 3D modeling software like Blender or Rhino Grasshopper which provides a programmable interface, resulting in finely and easily editable 3D models. To evaluate the proposed model, we created two datasets: one featuring simple scenes and another with complex scenes. The test results demonstrate the model's ability to accurately reconstruct simple scenes but reveal its challenges with more complex ones.
Voting Network for Contour Levee Farmland Segmentation and Classification
Sep 28, 2023High-resolution aerial imagery allows fine details in the segmentation of farmlands. However, small objects and features introduce distortions to the delineation of object boundaries, and larger contextual views are needed to mitigate class confusion. In this work, we present an end-to-end trainable network for segmenting farmlands with contour levees from high-resolution aerial imagery. A fusion block is devised that includes multiple voting blocks to achieve image segmentation and classification. We integrate the fusion block with a backbone and produce both semantic predictions and segmentation slices. The segmentation slices are used to perform majority voting on the predictions. The network is trained to assign the most likely class label of a segment to its pixels, learning the concept of farmlands rather than analyzing constitutive pixels separately. We evaluate our method using images from the National Agriculture Imagery Program. Our method achieved an average accuracy of 94.34\%. Compared to the state-of-the-art methods, the proposed method obtains an improvement of 6.96% and 2.63% in the F1 score on average.
Distilling ODE Solvers of Diffusion Models into Smaller Steps
Sep 28, 2023Distillation techniques have substantially improved the sampling speed of diffusion models, allowing of the generation within only one step or a few steps. However, these distillation methods require extensive training for each dataset, sampler, and network, which limits their practical applicability. To address this limitation, we propose a straightforward distillation approach, Distilled-ODE solvers (D-ODE solvers), that optimizes the ODE solver rather than training the denoising network. D-ODE solvers are formulated by simply applying a single parameter adjustment to existing ODE solvers. Subsequently, D-ODE solvers with smaller steps are optimized by ODE solvers with larger steps through distillation over a batch of samples. Our comprehensive experiments indicate that D-ODE solvers outperform existing ODE solvers, including DDIM, PNDM, DPM-Solver, DEIS, and EDM, especially when generating samples with fewer steps. Our method incur negligible computational overhead compared to previous distillation techniques, enabling simple and rapid integration with previous samplers. Qualitative analysis further shows that D-ODE solvers enhance image quality while preserving the sampling trajectory of ODE solvers.
Deep Single Models vs. Ensembles: Insights for a Fast Deployment of Parking Monitoring Systems
Sep 28, 2023Searching for available parking spots in high-density urban centers is a stressful task for drivers that can be mitigated by systems that know in advance the nearest parking space available. To this end, image-based systems offer cost advantages over other sensor-based alternatives (e.g., ultrasonic sensors), requiring less physical infrastructure for installation and maintenance. Despite recent deep learning advances, deploying intelligent parking monitoring is still a challenge since most approaches involve collecting and labeling large amounts of data, which is laborious and time-consuming. Our study aims to uncover the challenges in creating a global framework, trained using publicly available labeled parking lot images, that performs accurately across diverse scenarios, enabling the parking space monitoring as a ready-to-use system to deploy in a new environment. Through exhaustive experiments involving different datasets and deep learning architectures, including fusion strategies and ensemble methods, we found that models trained on diverse datasets can achieve 95\% accuracy without the burden of data annotation and model training on the target parking lot
DreamGaussian: Generative Gaussian Splatting for Efficient 3D Content Creation
Sep 28, 2023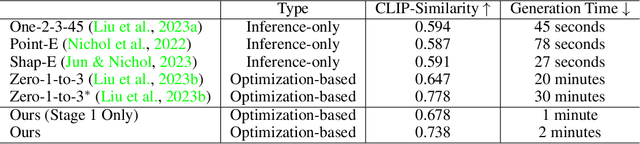
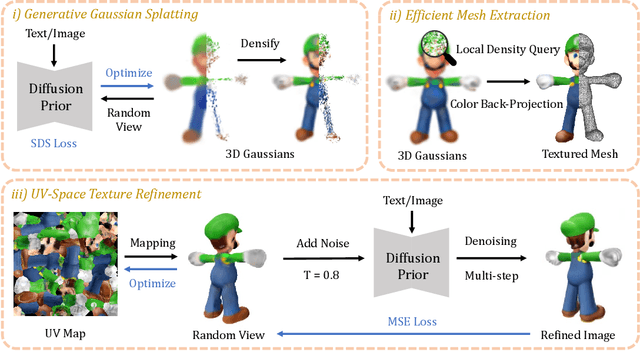

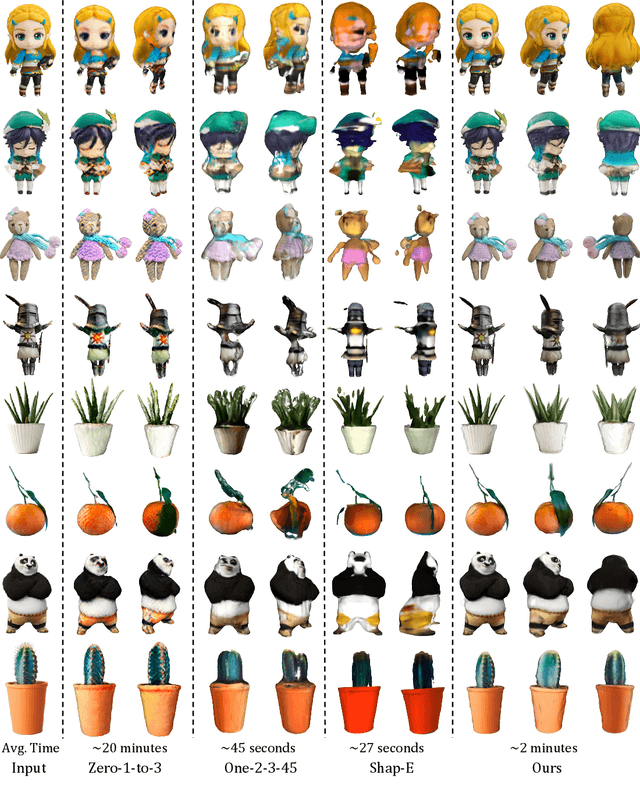
Recent advances in 3D content creation mostly leverage optimization-based 3D generation via score distillation sampling (SDS). Though promising results have been exhibited, these methods often suffer from slow per-sample optimization, limiting their practical usage. In this paper, we propose DreamGaussian, a novel 3D content generation framework that achieves both efficiency and quality simultaneously. Our key insight is to design a generative 3D Gaussian Splatting model with companioned mesh extraction and texture refinement in UV space. In contrast to the occupancy pruning used in Neural Radiance Fields, we demonstrate that the progressive densification of 3D Gaussians converges significantly faster for 3D generative tasks. To further enhance the texture quality and facilitate downstream applications, we introduce an efficient algorithm to convert 3D Gaussians into textured meshes and apply a fine-tuning stage to refine the details. Extensive experiments demonstrate the superior efficiency and competitive generation quality of our proposed approach. Notably, DreamGaussian produces high-quality textured meshes in just 2 minutes from a single-view image, achieving approximately 10 times acceleration compared to existing methods.
On the Contractivity of Plug-and-Play Operators
Sep 28, 2023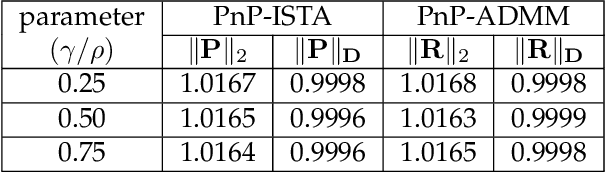

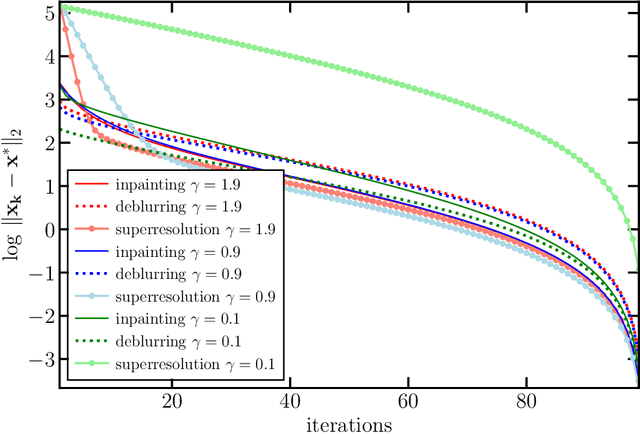
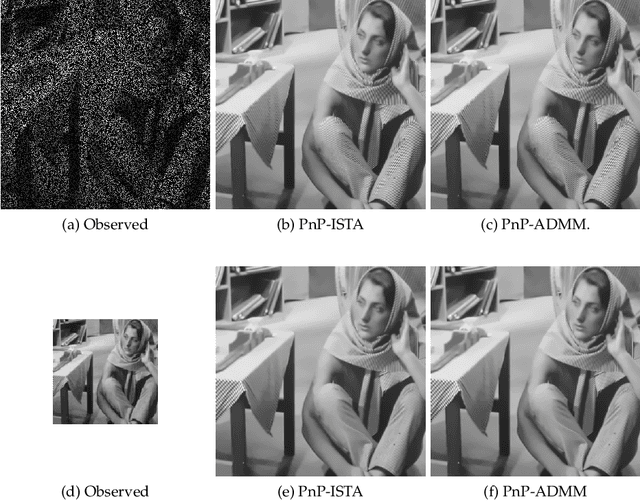
In plug-and-play (PnP) regularization, the proximal operator in algorithms such as ISTA and ADMM is replaced by a powerful denoiser. This formal substitution works surprisingly well in practice. In fact, PnP has been shown to give state-of-the-art results for various imaging applications. The empirical success of PnP has motivated researchers to understand its theoretical underpinnings and, in particular, its convergence. It was shown in prior work that for kernel denoisers such as the nonlocal means, PnP-ISTA provably converges under some strong assumptions on the forward model. The present work is motivated by the following questions: Can we relax the assumptions on the forward model? Can the convergence analysis be extended to PnP-ADMM? Can we estimate the convergence rate? In this letter, we resolve these questions using the contraction mapping theorem: (i) for symmetric denoisers, we show that (under mild conditions) PnP-ISTA and PnP-ADMM exhibit linear convergence; and (ii) for kernel denoisers, we show that PnP-ISTA and PnP-ADMM converge linearly for image inpainting. We validate our theoretical findings using reconstruction experiments.
AutoDiffusion: Training-Free Optimization of Time Steps and Architectures for Automated Diffusion Model Acceleration
Sep 23, 2023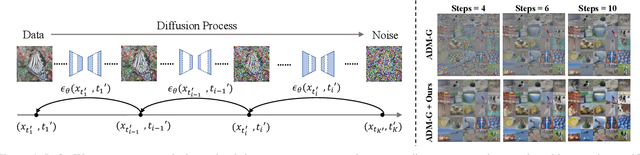
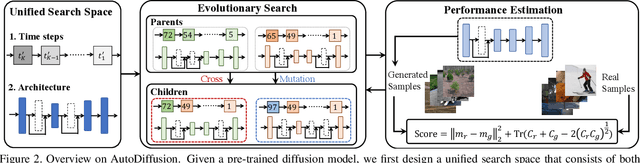
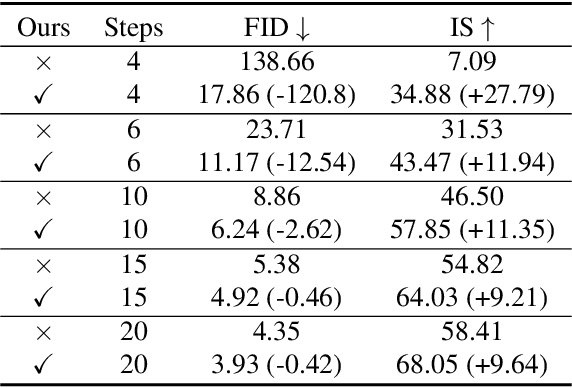
Diffusion models are emerging expressive generative models, in which a large number of time steps (inference steps) are required for a single image generation. To accelerate such tedious process, reducing steps uniformly is considered as an undisputed principle of diffusion models. We consider that such a uniform assumption is not the optimal solution in practice; i.e., we can find different optimal time steps for different models. Therefore, we propose to search the optimal time steps sequence and compressed model architecture in a unified framework to achieve effective image generation for diffusion models without any further training. Specifically, we first design a unified search space that consists of all possible time steps and various architectures. Then, a two stage evolutionary algorithm is introduced to find the optimal solution in the designed search space. To further accelerate the search process, we employ FID score between generated and real samples to estimate the performance of the sampled examples. As a result, the proposed method is (i).training-free, obtaining the optimal time steps and model architecture without any training process; (ii). orthogonal to most advanced diffusion samplers and can be integrated to gain better sample quality. (iii). generalized, where the searched time steps and architectures can be directly applied on different diffusion models with the same guidance scale. Experimental results show that our method achieves excellent performance by using only a few time steps, e.g. 17.86 FID score on ImageNet 64 $\times$ 64 with only four steps, compared to 138.66 with DDIM. The code is available at https://github.com/lilijiangg/AutoDiffusion.
Rethinking Amodal Video Segmentation from Learning Supervised Signals with Object-centric Representation
Sep 23, 2023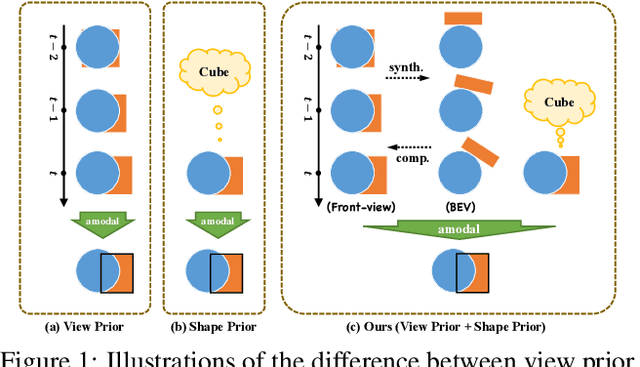
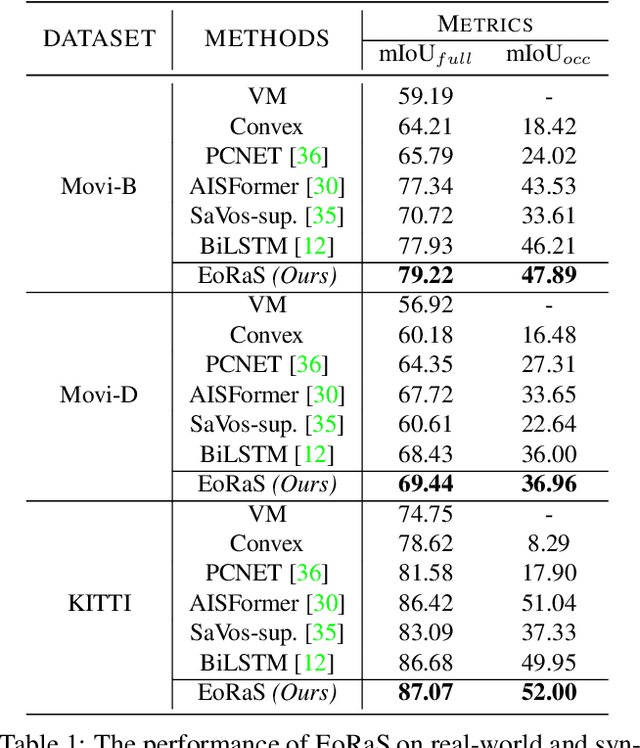
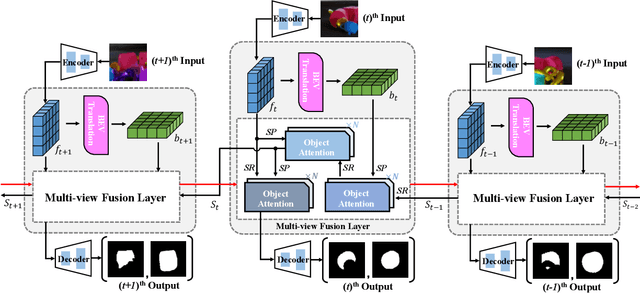

Video amodal segmentation is a particularly challenging task in computer vision, which requires to deduce the full shape of an object from the visible parts of it. Recently, some studies have achieved promising performance by using motion flow to integrate information across frames under a self-supervised setting. However, motion flow has a clear limitation by the two factors of moving cameras and object deformation. This paper presents a rethinking to previous works. We particularly leverage the supervised signals with object-centric representation in \textit{real-world scenarios}. The underlying idea is the supervision signal of the specific object and the features from different views can mutually benefit the deduction of the full mask in any specific frame. We thus propose an Efficient object-centric Representation amodal Segmentation (EoRaS). Specially, beyond solely relying on supervision signals, we design a translation module to project image features into the Bird's-Eye View (BEV), which introduces 3D information to improve current feature quality. Furthermore, we propose a multi-view fusion layer based temporal module which is equipped with a set of object slots and interacts with features from different views by attention mechanism to fulfill sufficient object representation completion. As a result, the full mask of the object can be decoded from image features updated by object slots. Extensive experiments on both real-world and synthetic benchmarks demonstrate the superiority of our proposed method, achieving state-of-the-art performance. Our code will be released at \url{https://github.com/kfan21/EoRaS}.