 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
Voting Network for Contour Levee Farmland Segmentation and Classification
Sep 28, 2023
High-resolution aerial imagery allows fine details in the segmentation of farmlands. However, small objects and features introduce distortions to the delineation of object boundaries, and larger contextual views are needed to mitigate class confusion. In this work, we present an end-to-end trainable network for segmenting farmlands with contour levees from high-resolution aerial imagery. A fusion block is devised that includes multiple voting blocks to achieve image segmentation and classification. We integrate the fusion block with a backbone and produce both semantic predictions and segmentation slices. The segmentation slices are used to perform majority voting on the predictions. The network is trained to assign the most likely class label of a segment to its pixels, learning the concept of farmlands rather than analyzing constitutive pixels separately. We evaluate our method using images from the National Agriculture Imagery Program. Our method achieved an average accuracy of 94.34\%. Compared to the state-of-the-art methods, the proposed method obtains an improvement of 6.96% and 2.63% in the F1 score on average.
Distilling ODE Solvers of Diffusion Models into Smaller Steps
Sep 28, 2023Distillation techniques have substantially improved the sampling speed of diffusion models, allowing of the generation within only one step or a few steps. However, these distillation methods require extensive training for each dataset, sampler, and network, which limits their practical applicability. To address this limitation, we propose a straightforward distillation approach, Distilled-ODE solvers (D-ODE solvers), that optimizes the ODE solver rather than training the denoising network. D-ODE solvers are formulated by simply applying a single parameter adjustment to existing ODE solvers. Subsequently, D-ODE solvers with smaller steps are optimized by ODE solvers with larger steps through distillation over a batch of samples. Our comprehensive experiments indicate that D-ODE solvers outperform existing ODE solvers, including DDIM, PNDM, DPM-Solver, DEIS, and EDM, especially when generating samples with fewer steps. Our method incur negligible computational overhead compared to previous distillation techniques, enabling simple and rapid integration with previous samplers. Qualitative analysis further shows that D-ODE solvers enhance image quality while preserving the sampling trajectory of ODE solvers.
Learning to Transform for Generalizable Instance-wise Invariance
Sep 28, 2023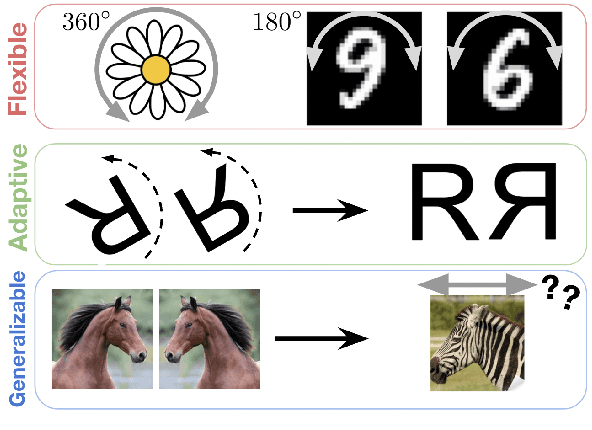
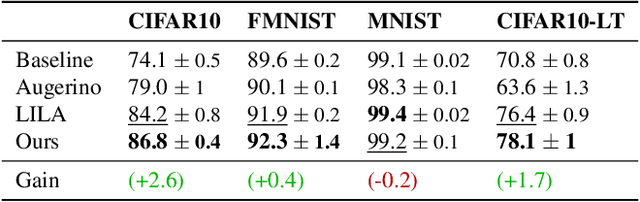
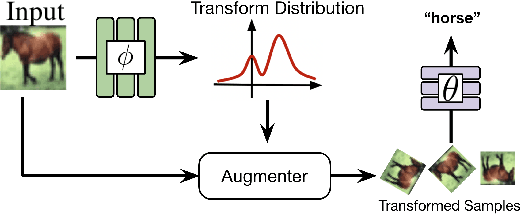
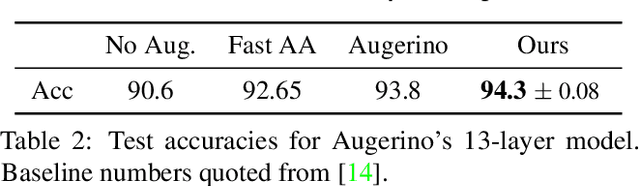
Computer vision research has long aimed to build systems that are robust to spatial transformations found in natural data. Traditionally, this is done using data augmentation or hard-coding invariances into the architecture. However, too much or too little invariance can hurt, and the correct amount is unknown a priori and dependent on the instance. Ideally, the appropriate invariance would be learned from data and inferred at test-time. We treat invariance as a prediction problem. Given any image, we use a normalizing flow to predict a distribution over transformations and average the predictions over them. Since this distribution only depends on the instance, we can align instances before classifying them and generalize invariance across classes. The same distribution can also be used to adapt to out-of-distribution poses. This normalizing flow is trained end-to-end and can learn a much larger range of transformations than Augerino and InstaAug. When used as data augmentation, our method shows accuracy and robustness gains on CIFAR 10, CIFAR10-LT, and TinyImageNet.
DreamGaussian: Generative Gaussian Splatting for Efficient 3D Content Creation
Sep 28, 2023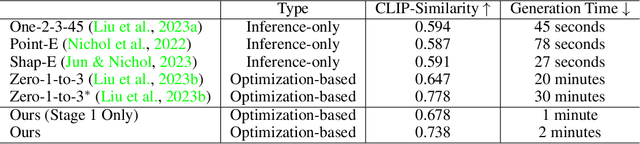
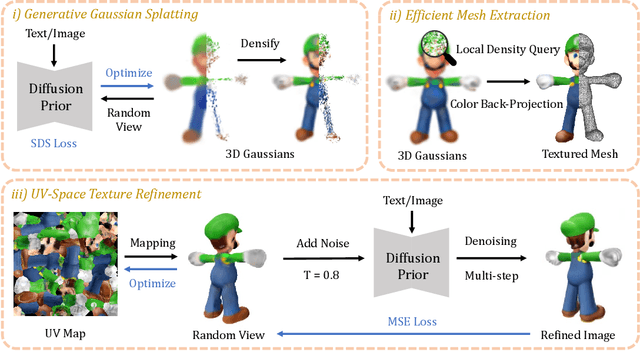

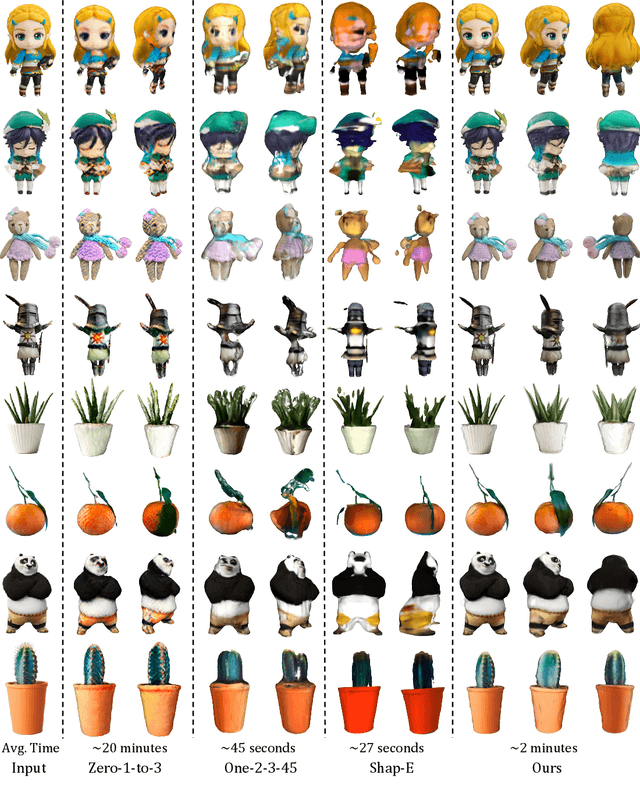
Recent advances in 3D content creation mostly leverage optimization-based 3D generation via score distillation sampling (SDS). Though promising results have been exhibited, these methods often suffer from slow per-sample optimization, limiting their practical usage. In this paper, we propose DreamGaussian, a novel 3D content generation framework that achieves both efficiency and quality simultaneously. Our key insight is to design a generative 3D Gaussian Splatting model with companioned mesh extraction and texture refinement in UV space. In contrast to the occupancy pruning used in Neural Radiance Fields, we demonstrate that the progressive densification of 3D Gaussians converges significantly faster for 3D generative tasks. To further enhance the texture quality and facilitate downstream applications, we introduce an efficient algorithm to convert 3D Gaussians into textured meshes and apply a fine-tuning stage to refine the details. Extensive experiments demonstrate the superior efficiency and competitive generation quality of our proposed approach. Notably, DreamGaussian produces high-quality textured meshes in just 2 minutes from a single-view image, achieving approximately 10 times acceleration compared to existing methods.
On the Contractivity of Plug-and-Play Operators
Sep 28, 2023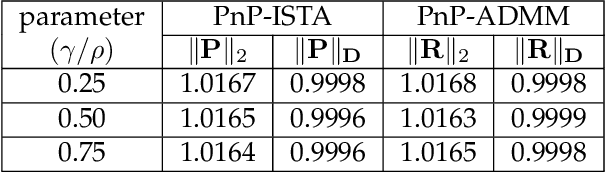

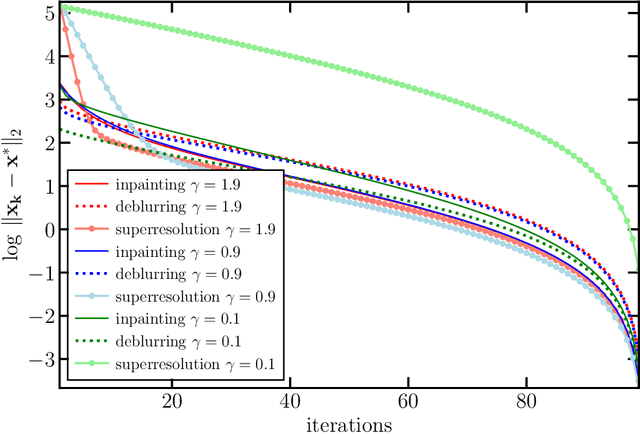
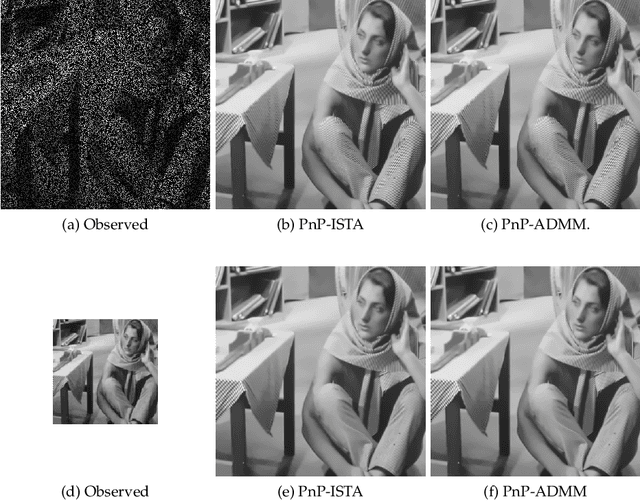
In plug-and-play (PnP) regularization, the proximal operator in algorithms such as ISTA and ADMM is replaced by a powerful denoiser. This formal substitution works surprisingly well in practice. In fact, PnP has been shown to give state-of-the-art results for various imaging applications. The empirical success of PnP has motivated researchers to understand its theoretical underpinnings and, in particular, its convergence. It was shown in prior work that for kernel denoisers such as the nonlocal means, PnP-ISTA provably converges under some strong assumptions on the forward model. The present work is motivated by the following questions: Can we relax the assumptions on the forward model? Can the convergence analysis be extended to PnP-ADMM? Can we estimate the convergence rate? In this letter, we resolve these questions using the contraction mapping theorem: (i) for symmetric denoisers, we show that (under mild conditions) PnP-ISTA and PnP-ADMM exhibit linear convergence; and (ii) for kernel denoisers, we show that PnP-ISTA and PnP-ADMM converge linearly for image inpainting. We validate our theoretical findings using reconstruction experiments.
Deep Single Models vs. Ensembles: Insights for a Fast Deployment of Parking Monitoring Systems
Sep 28, 2023Searching for available parking spots in high-density urban centers is a stressful task for drivers that can be mitigated by systems that know in advance the nearest parking space available. To this end, image-based systems offer cost advantages over other sensor-based alternatives (e.g., ultrasonic sensors), requiring less physical infrastructure for installation and maintenance. Despite recent deep learning advances, deploying intelligent parking monitoring is still a challenge since most approaches involve collecting and labeling large amounts of data, which is laborious and time-consuming. Our study aims to uncover the challenges in creating a global framework, trained using publicly available labeled parking lot images, that performs accurately across diverse scenarios, enabling the parking space monitoring as a ready-to-use system to deploy in a new environment. Through exhaustive experiments involving different datasets and deep learning architectures, including fusion strategies and ensemble methods, we found that models trained on diverse datasets can achieve 95\% accuracy without the burden of data annotation and model training on the target parking lot
Sketch2CADScript: 3D Scene Reconstruction from 2D Sketch using Visual Transformer and Rhino Grasshopper
Sep 28, 2023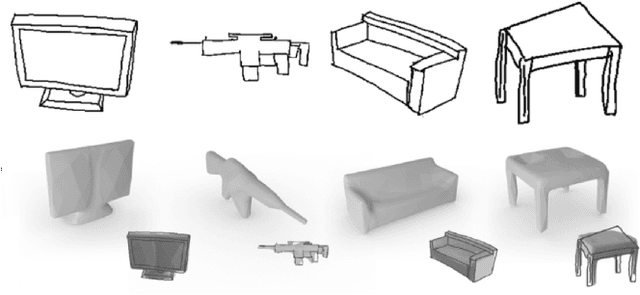
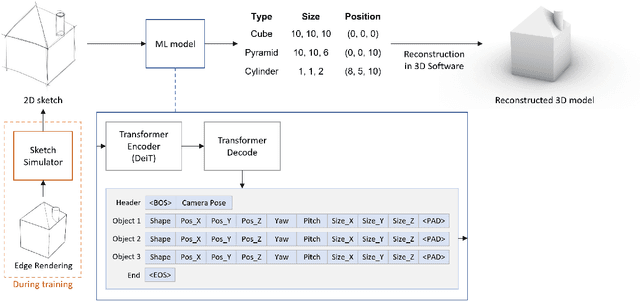
Existing 3D model reconstruction methods typically produce outputs in the form of voxels, point clouds, or meshes. However, each of these approaches has its limitations and may not be suitable for every scenario. For instance, the resulting model may exhibit a rough surface and distorted structure, making manual editing and post-processing challenging for humans. In this paper, we introduce a novel 3D reconstruction method designed to address these issues. We trained a visual transformer to predict a "scene descriptor" from a single wire-frame image. This descriptor encompasses crucial information, including object types and parameters such as position, rotation, and size. With the predicted parameters, a 3D scene can be reconstructed using 3D modeling software like Blender or Rhino Grasshopper which provides a programmable interface, resulting in finely and easily editable 3D models. To evaluate the proposed model, we created two datasets: one featuring simple scenes and another with complex scenes. The test results demonstrate the model's ability to accurately reconstruct simple scenes but reveal its challenges with more complex ones.
Recurrent Spike-based Image Restoration under General Illumination
Aug 06, 2023Spike camera is a new type of bio-inspired vision sensor that records light intensity in the form of a spike array with high temporal resolution (20,000 Hz). This new paradigm of vision sensor offers significant advantages for many vision tasks such as high speed image reconstruction. However, existing spike-based approaches typically assume that the scenes are with sufficient light intensity, which is usually unavailable in many real-world scenarios such as rainy days or dusk scenes. To unlock more spike-based application scenarios, we propose a Recurrent Spike-based Image Restoration (RSIR) network, which is the first work towards restoring clear images from spike arrays under general illumination. Specifically, to accurately describe the noise distribution under different illuminations, we build a physical-based spike noise model according to the sampling process of the spike camera. Based on the noise model, we design our RSIR network which consists of an adaptive spike transformation module, a recurrent temporal feature fusion module, and a frequency-based spike denoising module. Our RSIR can process the spike array in a recursive manner to ensure that the spike temporal information is well utilized. In the training process, we generate the simulated spike data based on our noise model to train our network. Extensive experiments on real-world datasets with different illuminations demonstrate the effectiveness of the proposed network. The code and dataset are released at https://github.com/BIT-Vision/RSIR.
Small Objects Matters in Weakly-supervised Semantic Segmentation
Sep 25, 2023Weakly-supervised semantic segmentation (WSSS) performs pixel-wise classification given only image-level labels for training. Despite the difficulty of this task, the research community has achieved promising results over the last five years. Still, current WSSS literature misses the detailed sense of how well the methods perform on different sizes of objects. Thus we propose a novel evaluation metric to provide a comprehensive assessment across different object sizes and collect a size-balanced evaluation set to complement PASCAL VOC. With these two gadgets, we reveal that the existing WSSS methods struggle in capturing small objects. Furthermore, we propose a size-balanced cross-entropy loss coupled with a proper training strategy. It generally improves existing WSSS methods as validated upon ten baselines on three different datasets.
Learning End-to-End Channel Coding with Diffusion Models
Sep 21, 2023The training of neural encoders via deep learning necessitates a differentiable channel model due to the backpropagation algorithm. This requirement can be sidestepped by approximating either the channel distribution or its gradient through pilot signals in real-world scenarios. The initial approach draws upon the latest advancements in image generation, utilizing generative adversarial networks (GANs) or their enhanced variants to generate channel distributions. In this paper, we address this channel approximation challenge with diffusion models, which have demonstrated high sample quality in image generation. We offer an end-to-end channel coding framework underpinned by diffusion models and propose an efficient training algorithm. Our simulations with various channel models establish that our diffusion models learn the channel distribution accurately, thereby achieving near-optimal end-to-end symbol error rates (SERs). We also note a significant advantage of diffusion models: A robust generalization capability in high signal-to-noise ratio regions, in contrast to GAN variants that suffer from error floor. Furthermore, we examine the trade-off between sample quality and sampling speed, when an accelerated sampling algorithm is deployed, and investigate the effect of the noise scheduling on this trade-off. With an apt choice of noise scheduling, sampling time can be significantly reduced with a minor increase in SER.