 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
Let There be Light: Improved Traffic Surveillance via Detail Preserving Night-to-Day Transfer
May 11, 2021

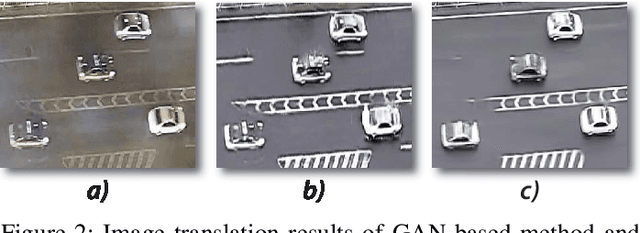
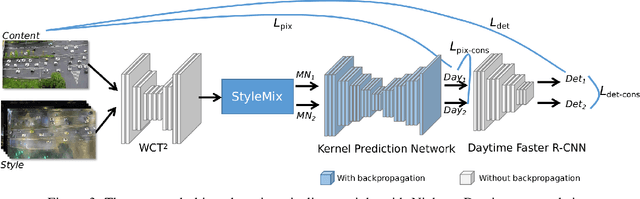
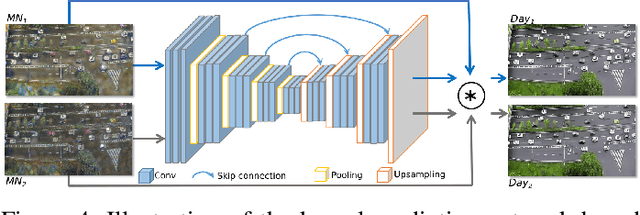
In recent years, image and video surveillance have made considerable progresses to the Intelligent Transportation Systems (ITS) with the help of deep Convolutional Neural Networks (CNNs). As one of the state-of-the-art perception approaches, detecting the interested objects in each frame of video surveillance is widely desired by ITS. Currently, object detection shows remarkable efficiency and reliability in standard scenarios such as daytime scenes with favorable illumination conditions. However, in face of adverse conditions such as the nighttime, object detection loses its accuracy significantly. One of the main causes of the problem is the lack of sufficient annotated detection datasets of nighttime scenes. In this paper, we propose a framework to alleviate the accuracy decline when object detection is taken to adverse conditions by using image translation method. We propose to utilize style translation based StyleMix method to acquire pairs of day time image and nighttime image as training data for following nighttime to daytime image translation. To alleviate the detail corruptions caused by Generative Adversarial Networks (GANs), we propose to utilize Kernel Prediction Network (KPN) based method to refine the nighttime to daytime image translation. The KPN network is trained with object detection task together to adapt the trained daytime model to nighttime vehicle detection directly. Experiments on vehicle detection verified the accuracy and effectiveness of the proposed approach.
Robust Pose Transfer with Dynamic Details using Neural Video Rendering
Jul 14, 2021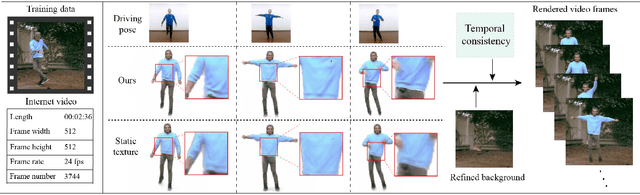
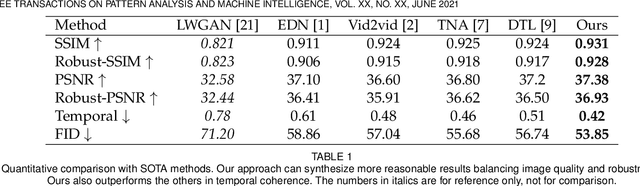
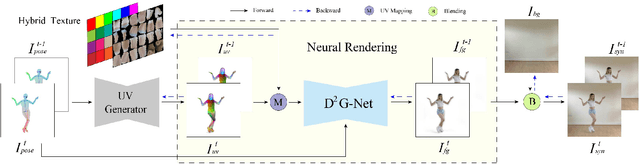
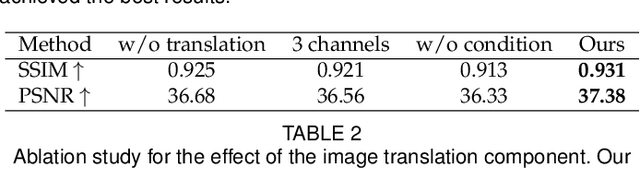
Pose transfer of human videos aims to generate a high fidelity video of a target person imitating actions of a source person. A few studies have made great progress either through image translation with deep latent features or neural rendering with explicit 3D features. However, both of them rely on large amounts of training data to generate realistic results, and the performance degrades on more accessible internet videos due to insufficient training frames. In this paper, we demonstrate that the dynamic details can be preserved even trained from short monocular videos. Overall, we propose a neural video rendering framework coupled with an image-translation-based dynamic details generation network (D2G-Net), which fully utilizes both the stability of explicit 3D features and the capacity of learning components. To be specific, a novel texture representation is presented to encode both the static and pose-varying appearance characteristics, which is then mapped to the image space and rendered as a detail-rich frame in the neural rendering stage. Moreover, we introduce a concise temporal loss in the training stage to suppress the detail flickering that is made more visible due to high-quality dynamic details generated by our method. Through extensive comparisons, we demonstrate that our neural human video renderer is capable of achieving both clearer dynamic details and more robust performance even on accessible short videos with only 2k - 4k frames.
Not All Images are Worth 16x16 Words: Dynamic Vision Transformers with Adaptive Sequence Length
May 31, 2021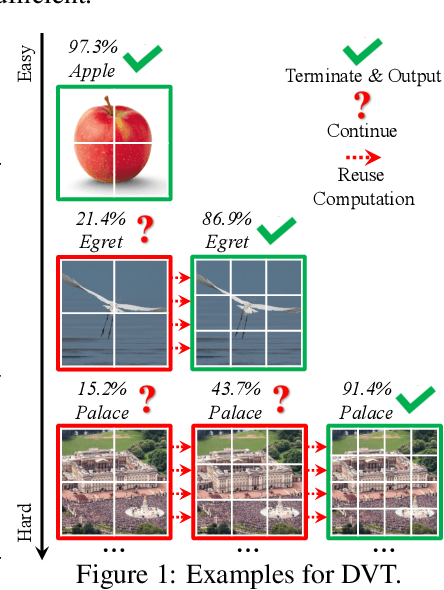
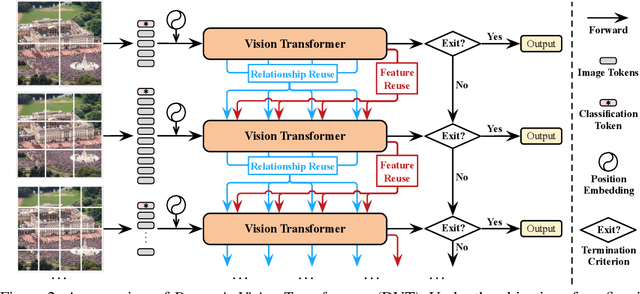
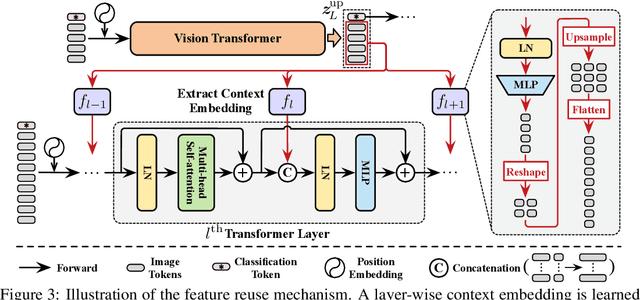
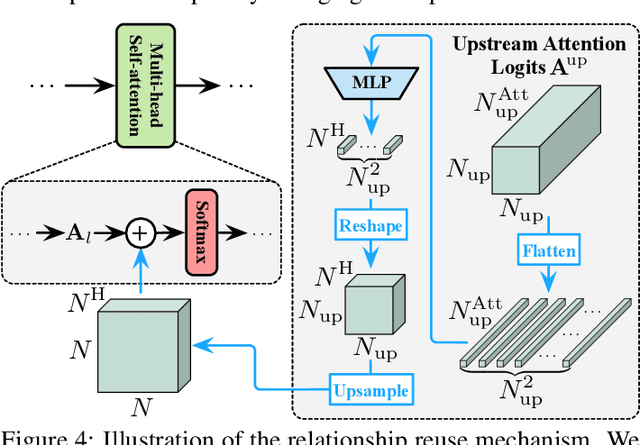
Vision Transformers (ViT) have achieved remarkable success in large-scale image recognition. They split every 2D image into a fixed number of patches, each of which is treated as a token. Generally, representing an image with more tokens would lead to higher prediction accuracy, while it also results in drastically increased computational cost. To achieve a decent trade-off between accuracy and speed, the number of tokens is empirically set to 16x16. In this paper, we argue that every image has its own characteristics, and ideally the token number should be conditioned on each individual input. In fact, we have observed that there exist a considerable number of "easy" images which can be accurately predicted with a mere number of 4x4 tokens, while only a small fraction of "hard" ones need a finer representation. Inspired by this phenomenon, we propose a Dynamic Transformer to automatically configure a proper number of tokens for each input image. This is achieved by cascading multiple Transformers with increasing numbers of tokens, which are sequentially activated in an adaptive fashion at test time, i.e., the inference is terminated once a sufficiently confident prediction is produced. We further design efficient feature reuse and relationship reuse mechanisms across different components of the Dynamic Transformer to reduce redundant computations. Extensive empirical results on ImageNet, CIFAR-10, and CIFAR-100 demonstrate that our method significantly outperforms the competitive baselines in terms of both theoretical computational efficiency and practical inference speed.
StarGAN: Unified Generative Adversarial Networks for Multi-Domain Image-to-Image Translation
Sep 21, 2018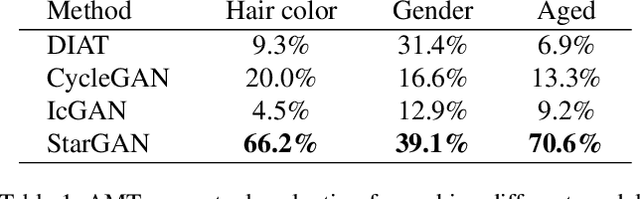
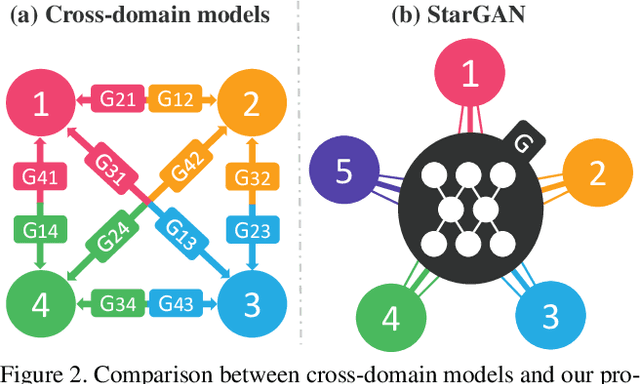
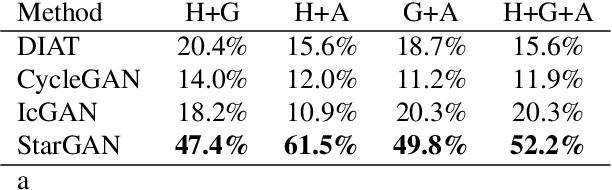
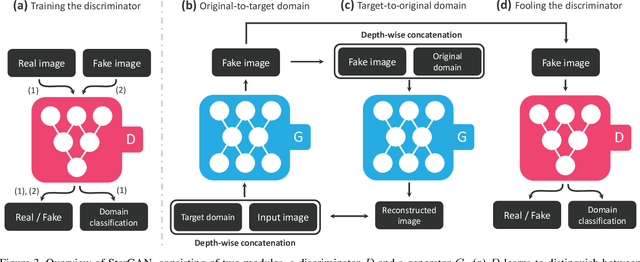
Recent studies have shown remarkable success in image-to-image translation for two domains. However, existing approaches have limited scalability and robustness in handling more than two domains, since different models should be built independently for every pair of image domains. To address this limitation, we propose StarGAN, a novel and scalable approach that can perform image-to-image translations for multiple domains using only a single model. Such a unified model architecture of StarGAN allows simultaneous training of multiple datasets with different domains within a single network. This leads to StarGAN's superior quality of translated images compared to existing models as well as the novel capability of flexibly translating an input image to any desired target domain. We empirically demonstrate the effectiveness of our approach on a facial attribute transfer and a facial expression synthesis tasks.
* Accepted to CVPR 2018 (Oral)
UDC 2020 Challenge on Image Restoration of Under-Display Camera: Methods and Results
Aug 18, 2020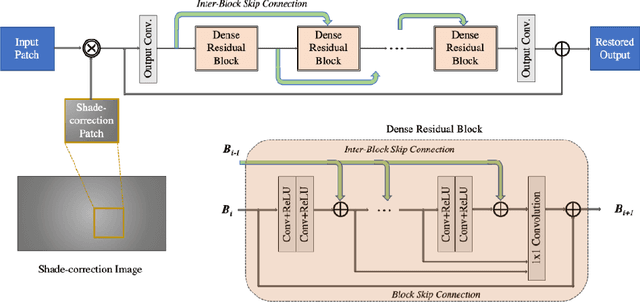
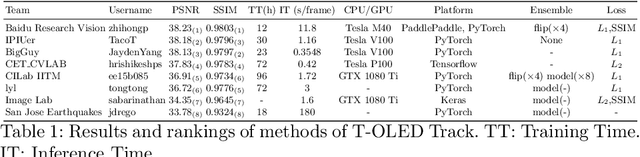
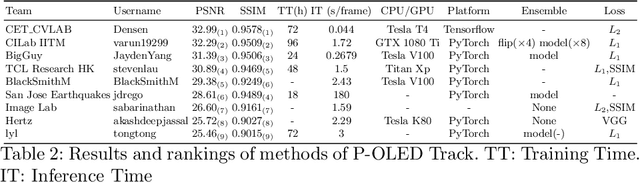
This paper is the report of the first Under-Display Camera (UDC) image restoration challenge in conjunction with the RLQ workshop at ECCV 2020. The challenge is based on a newly-collected database of Under-Display Camera. The challenge tracks correspond to two types of display: a 4k Transparent OLED (T-OLED) and a phone Pentile OLED (P-OLED). Along with about 150 teams registered the challenge, eight and nine teams submitted the results during the testing phase for each track. The results in the paper are state-of-the-art restoration performance of Under-Display Camera Restoration. Datasets and paper are available at https://yzhouas.github.io/projects/UDC/udc.html.
Efficient Real-Time Image Recognition Using Collaborative Swarm of UAVs and Convolutional Networks
Jul 09, 2021
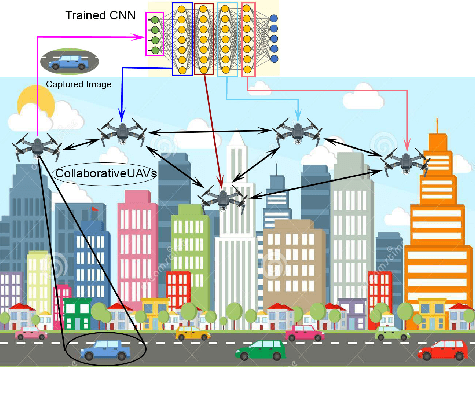
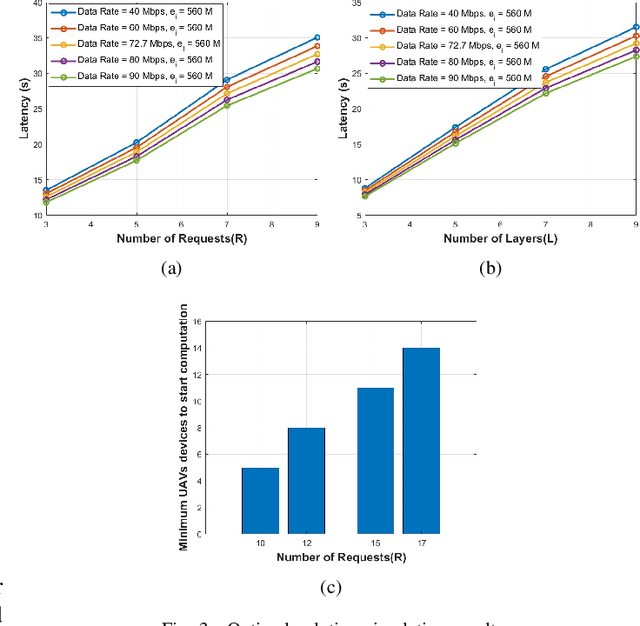
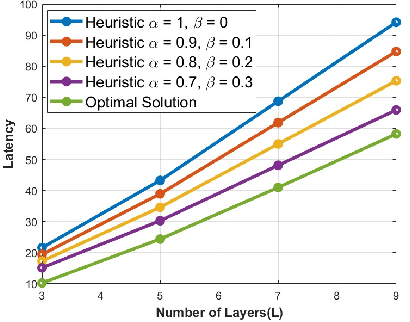
Unmanned Aerial Vehicles (UAVs) have recently attracted significant attention due to their outstanding ability to be used in different sectors and serve in difficult and dangerous areas. Moreover, the advancements in computer vision and artificial intelligence have increased the use of UAVs in various applications and solutions, such as forest fires detection and borders monitoring. However, using deep neural networks (DNNs) with UAVs introduces several challenges of processing deeper networks and complex models, which restricts their on-board computation. In this work, we present a strategy aiming at distributing inference requests to a swarm of resource-constrained UAVs that classifies captured images on-board and finds the minimum decision-making latency. We formulate the model as an optimization problem that minimizes the latency between acquiring images and making the final decisions. The formulated optimization solution is an NP-hard problem. Hence it is not adequate for online resource allocation. Therefore, we introduce an online heuristic solution, namely DistInference, to find the layers placement strategy that gives the best latency among the available UAVs. The proposed approach is general enough to be used for different low decision-latency applications as well as for all CNN types organized into the pipeline of layers (e.g., VGG) or based on residual blocks (e.g., ResNet).
BlendGAN: Implicitly GAN Blending for Arbitrary Stylized Face Generation
Oct 22, 2021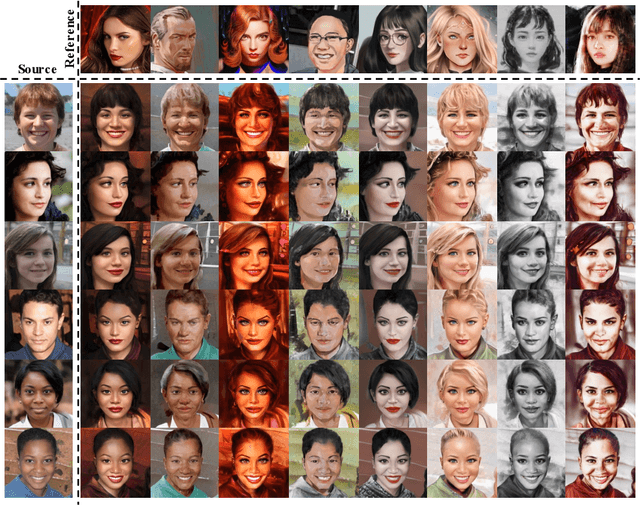
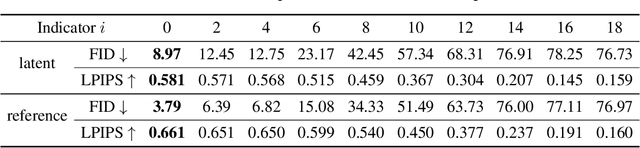
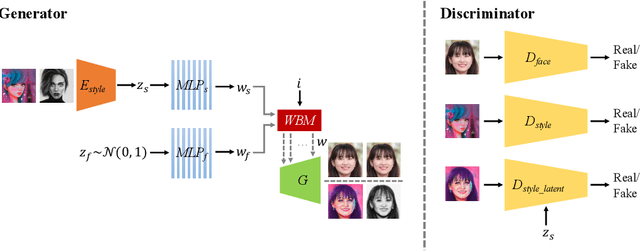
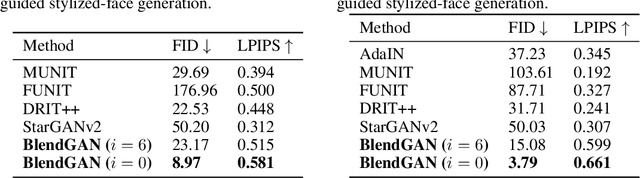
Generative Adversarial Networks (GANs) have made a dramatic leap in high-fidelity image synthesis and stylized face generation. Recently, a layer-swapping mechanism has been developed to improve the stylization performance. However, this method is incapable of fitting arbitrary styles in a single model and requires hundreds of style-consistent training images for each style. To address the above issues, we propose BlendGAN for arbitrary stylized face generation by leveraging a flexible blending strategy and a generic artistic dataset. Specifically, we first train a self-supervised style encoder on the generic artistic dataset to extract the representations of arbitrary styles. In addition, a weighted blending module (WBM) is proposed to blend face and style representations implicitly and control the arbitrary stylization effect. By doing so, BlendGAN can gracefully fit arbitrary styles in a unified model while avoiding case-by-case preparation of style-consistent training images. To this end, we also present a novel large-scale artistic face dataset AAHQ. Extensive experiments demonstrate that BlendGAN outperforms state-of-the-art methods in terms of visual quality and style diversity for both latent-guided and reference-guided stylized face synthesis.
E2E-VLP: End-to-End Vision-Language Pre-training Enhanced by Visual Learning
Jun 04, 2021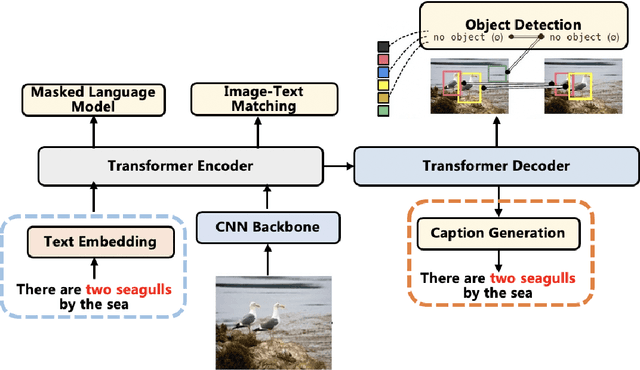
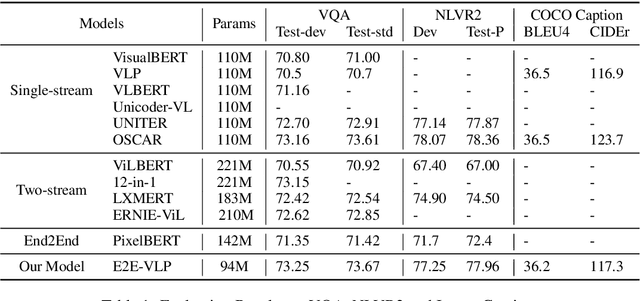
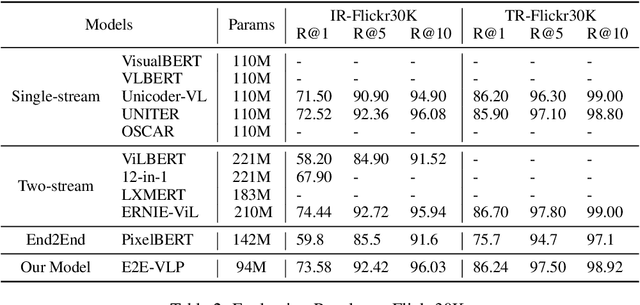
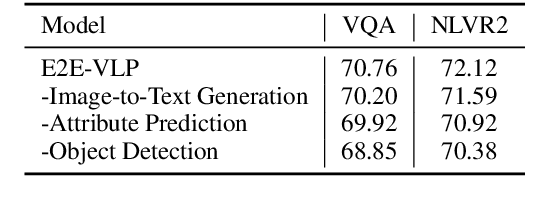
Vision-language pre-training (VLP) on large-scale image-text pairs has achieved huge success for the cross-modal downstream tasks. The most existing pre-training methods mainly adopt a two-step training procedure, which firstly employs a pre-trained object detector to extract region-based visual features, then concatenates the image representation and text embedding as the input of Transformer to train. However, these methods face problems of using task-specific visual representation of the specific object detector for generic cross-modal understanding, and the computation inefficiency of two-stage pipeline. In this paper, we propose the first end-to-end vision-language pre-trained model for both V+L understanding and generation, namely E2E-VLP, where we build a unified Transformer framework to jointly learn visual representation, and semantic alignments between image and text. We incorporate the tasks of object detection and image captioning into pre-training with a unified Transformer encoder-decoder architecture for enhancing visual learning. An extensive set of experiments have been conducted on well-established vision-language downstream tasks to demonstrate the effectiveness of this novel VLP paradigm.
A Survey on Biomedical Image Captioning
May 26, 2019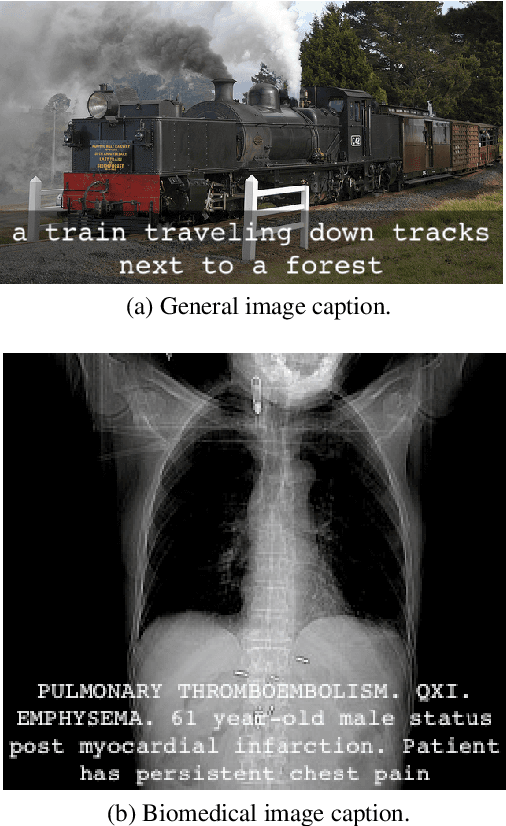
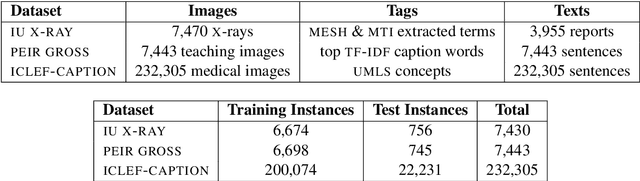
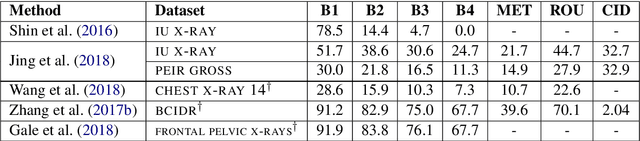
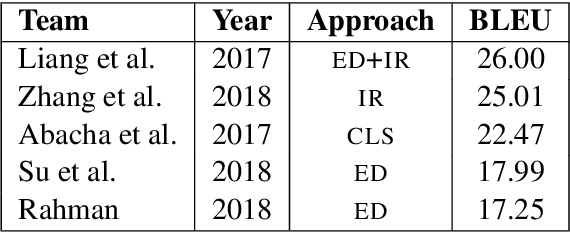
Image captioning applied to biomedical images can assist and accelerate the diagnosis process followed by clinicians. This article is the first survey of biomedical image captioning, discussing datasets, evaluation measures, and state of the art methods. Additionally, we suggest two baselines, a weak and a stronger one; the latter outperforms all current state of the art systems on one of the datasets.
High-Resolution Depth Maps Based on TOF-Stereo Fusion
Jul 30, 2021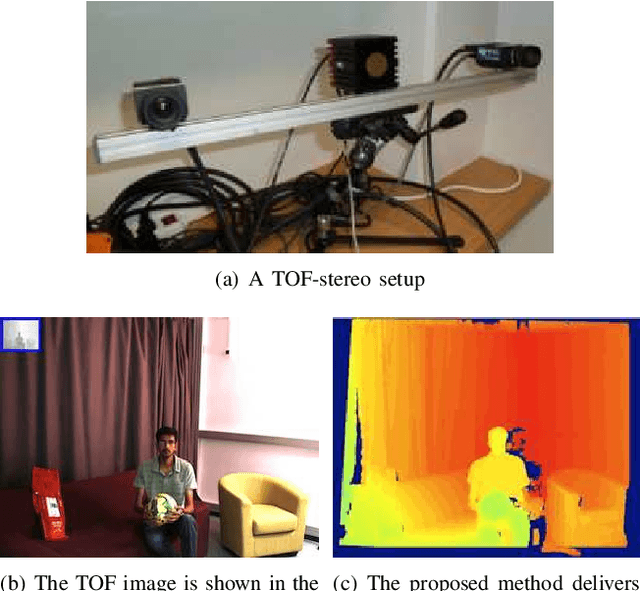
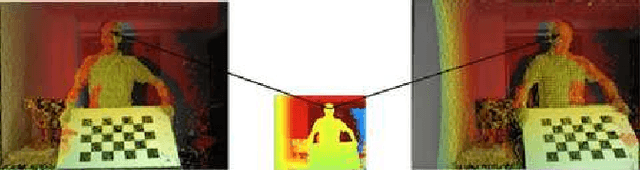
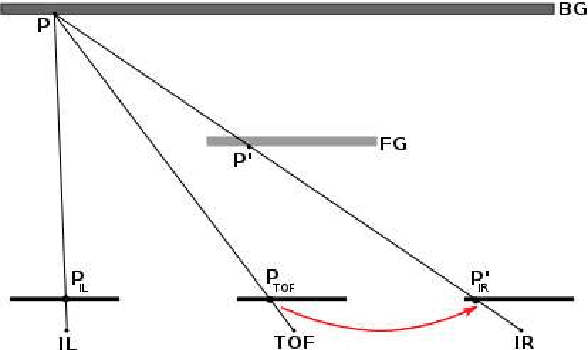
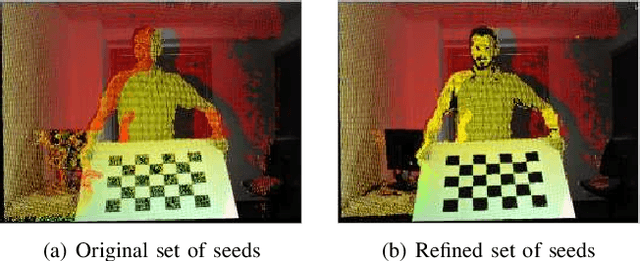
The combination of range sensors with color cameras can be very useful for robot navigation, semantic perception, manipulation, and telepresence. Several methods of combining range- and color-data have been investigated and successfully used in various robotic applications. Most of these systems suffer from the problems of noise in the range-data and resolution mismatch between the range sensor and the color cameras, since the resolution of current range sensors is much less than the resolution of color cameras. High-resolution depth maps can be obtained using stereo matching, but this often fails to construct accurate depth maps of weakly/repetitively textured scenes, or if the scene exhibits complex self-occlusions. Range sensors provide coarse depth information regardless of presence/absence of texture. The use of a calibrated system, composed of a time-of-flight (TOF) camera and of a stereoscopic camera pair, allows data fusion thus overcoming the weaknesses of both individual sensors. We propose a novel TOF-stereo fusion method based on an efficient seed-growing algorithm which uses the TOF data projected onto the stereo image pair as an initial set of correspondences. These initial "seeds" are then propagated based on a Bayesian model which combines an image similarity score with rough depth priors computed from the low-resolution range data. The overall result is a dense and accurate depth map at the resolution of the color cameras at hand. We show that the proposed algorithm outperforms 2D image-based stereo algorithms and that the results are of higher resolution than off-the-shelf color-range sensors, e.g., Kinect. Moreover, the algorithm potentially exhibits real-time performance on a single CPU.