 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
BachGAN: High-Resolution Image Synthesis from Salient Object Layout
Mar 26, 2020
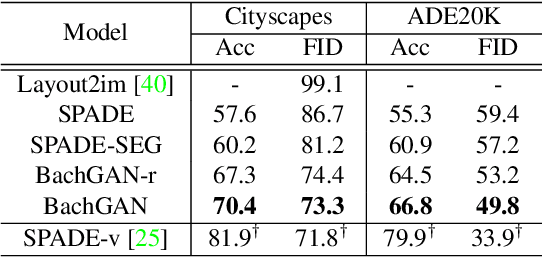
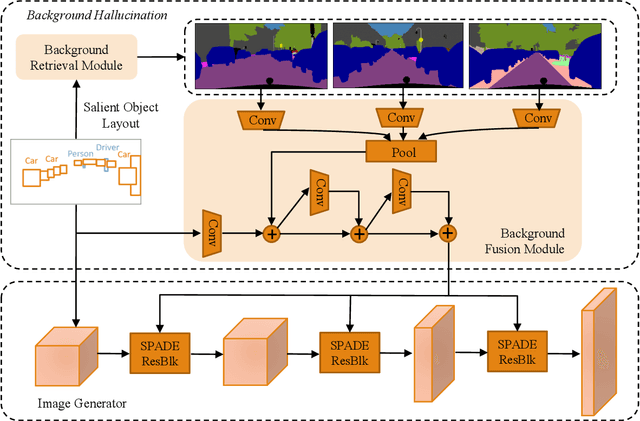

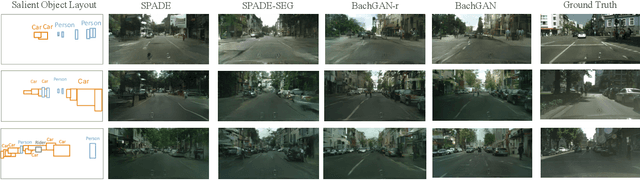
We propose a new task towards more practical application for image generation - high-quality image synthesis from salient object layout. This new setting allows users to provide the layout of salient objects only (i.e., foreground bounding boxes and categories), and lets the model complete the drawing with an invented background and a matching foreground. Two main challenges spring from this new task: (i) how to generate fine-grained details and realistic textures without segmentation map input; and (ii) how to create a background and weave it seamlessly into standalone objects. To tackle this, we propose Background Hallucination Generative Adversarial Network (BachGAN), which first selects a set of segmentation maps from a large candidate pool via a background retrieval module, then encodes these candidate layouts via a background fusion module to hallucinate a suitable background for the given objects. By generating the hallucinated background representation dynamically, our model can synthesize high-resolution images with both photo-realistic foreground and integral background. Experiments on Cityscapes and ADE20K datasets demonstrate the advantage of BachGAN over existing methods, measured on both visual fidelity of generated images and visual alignment between output images and input layouts.
Cross-modal Scene Graph Matching for Relationship-aware Image-Text Retrieval
Oct 11, 2019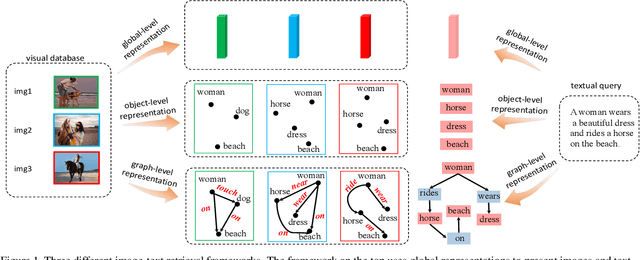
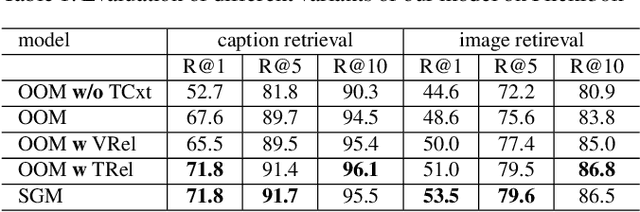
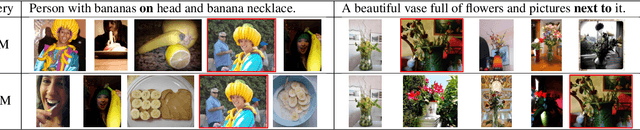
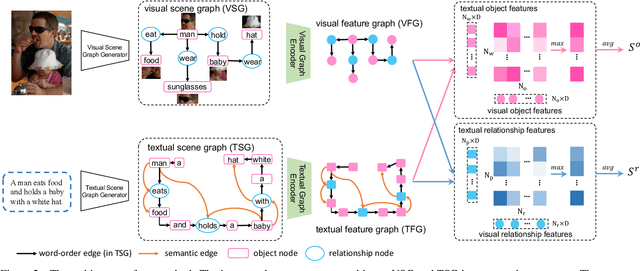
Image-text retrieval of natural scenes has been a popular research topic. Since image and text are heterogeneous cross-modal data, one of the key challenges is how to learn comprehensive yet unified representations to express the multi-modal data. A natural scene image mainly involves two kinds of visual concepts, objects and their relationships, which are equally essential to image-text retrieval. Therefore, a good representation should account for both of them. In the light of recent success of scene graph in many CV and NLP tasks for describing complex natural scenes, we propose to represent image and text with two kinds of scene graphs: visual scene graph (VSG) and textual scene graph (TSG), each of which is exploited to jointly characterize objects and relationships in the corresponding modality. The image-text retrieval task is then naturally formulated as cross-modal scene graph matching. Specifically, we design two particular scene graph encoders in our model for VSG and TSG, which can refine the representation of each node on the graph by aggregating neighborhood information. As a result, both object-level and relationship-level cross-modal features can be obtained, which favorably enables us to evaluate the similarity of image and text in the two levels in a more plausible way. We achieve state-of-the-art results on Flickr30k and MSCOCO, which verifies the advantages of our graph matching based approach for image-text retrieval.
Data Uncertainty Guided Noise-aware Preprocessing Of Fingerprints
Jul 02, 2021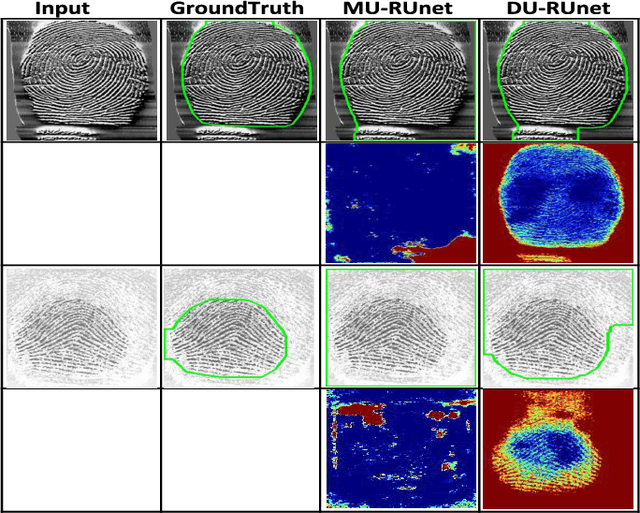
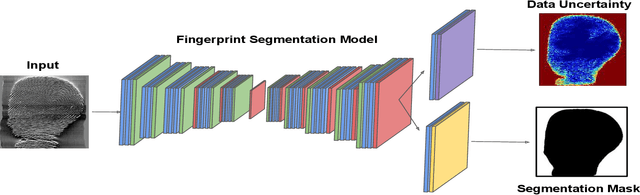
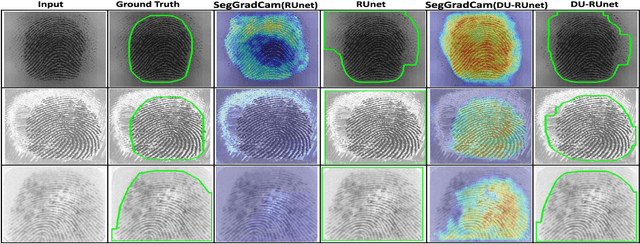
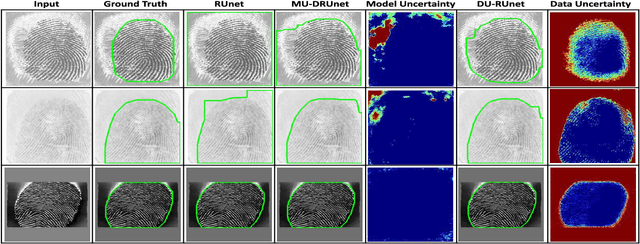
The effectiveness of fingerprint-based authentication systems on good quality fingerprints is established long back. However, the performance of standard fingerprint matching systems on noisy and poor quality fingerprints is far from satisfactory. Towards this, we propose a data uncertainty-based framework which enables the state-of-the-art fingerprint preprocessing models to quantify noise present in the input image and identify fingerprint regions with background noise and poor ridge clarity. Quantification of noise helps the model two folds: firstly, it makes the objective function adaptive to the noise in a particular input fingerprint and consequently, helps to achieve robust performance on noisy and distorted fingerprint regions. Secondly, it provides a noise variance map which indicates noisy pixels in the input fingerprint image. The predicted noise variance map enables the end-users to understand erroneous predictions due to noise present in the input image. Extensive experimental evaluation on 13 publicly available fingerprint databases, across different architectural choices and two fingerprint processing tasks demonstrate effectiveness of the proposed framework.
FBSNet: A Fast Bilateral Symmetrical Network for Real-Time Semantic Segmentation
Sep 02, 2021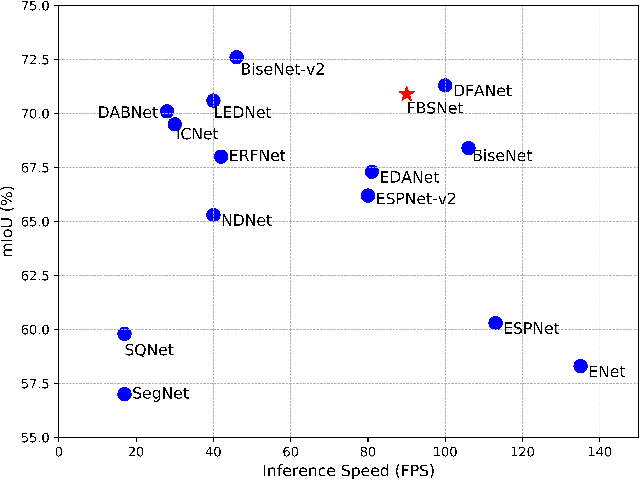
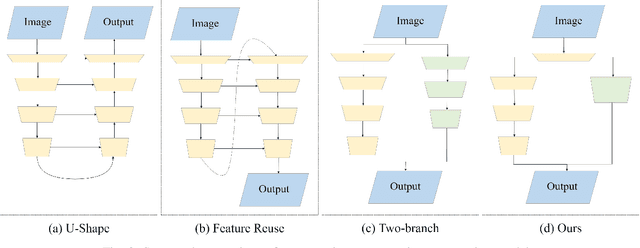
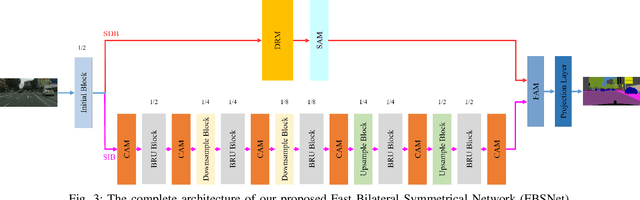
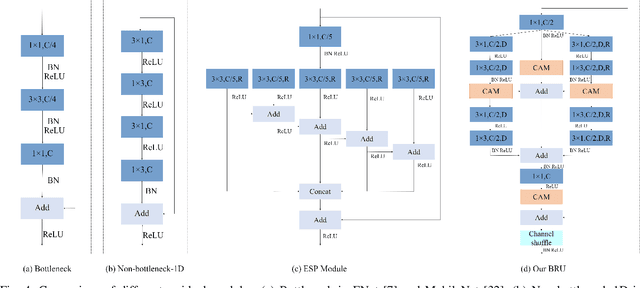
Real-time semantic segmentation, which can be visually understood as the pixel-level classification task on the input image, currently has broad application prospects, especially in the fast-developing fields of autonomous driving and drone navigation. However, the huge burden of calculation together with redundant parameters are still the obstacles to its technological development. In this paper, we propose a Fast Bilateral Symmetrical Network (FBSNet) to alleviate the above challenges. Specifically, FBSNet employs a symmetrical encoder-decoder structure with two branches, semantic information branch, and spatial detail branch. The semantic information branch is the main branch with deep network architecture to acquire the contextual information of the input image and meanwhile acquire sufficient receptive field. While spatial detail branch is a shallow and simple network used to establish local dependencies of each pixel for preserving details, which is essential for restoring the original resolution during the decoding phase. Meanwhile, a feature aggregation module (FAM) is designed to effectively combine the output features of the two branches. The experimental results of Cityscapes and CamVid show that the proposed FBSNet can strike a good balance between accuracy and efficiency. Specifically, it obtains 70.9\% and 68.9\% mIoU along with the inference speed of 90 fps and 120 fps on these two test datasets, respectively, with only 0.62 million parameters on a single RTX 2080Ti GPU.
SyMetric: Measuring the Quality of Learnt Hamiltonian Dynamics Inferred from Vision
Nov 10, 2021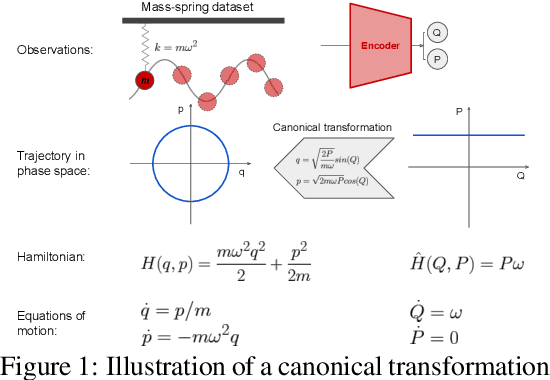

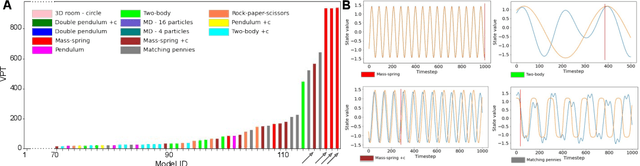

A recently proposed class of models attempts to learn latent dynamics from high-dimensional observations, like images, using priors informed by Hamiltonian mechanics. While these models have important potential applications in areas like robotics or autonomous driving, there is currently no good way to evaluate their performance: existing methods primarily rely on image reconstruction quality, which does not always reflect the quality of the learnt latent dynamics. In this work, we empirically highlight the problems with the existing measures and develop a set of new measures, including a binary indicator of whether the underlying Hamiltonian dynamics have been faithfully captured, which we call Symplecticity Metric or SyMetric. Our measures take advantage of the known properties of Hamiltonian dynamics and are more discriminative of the model's ability to capture the underlying dynamics than reconstruction error. Using SyMetric, we identify a set of architectural choices that significantly improve the performance of a previously proposed model for inferring latent dynamics from pixels, the Hamiltonian Generative Network (HGN). Unlike the original HGN, the new HGN++ is able to discover an interpretable phase space with physically meaningful latents on some datasets. Furthermore, it is stable for significantly longer rollouts on a diverse range of 13 datasets, producing rollouts of essentially infinite length both forward and backwards in time with no degradation in quality on a subset of the datasets.
Deep Face Video Inpainting via UV Mapping
Sep 02, 2021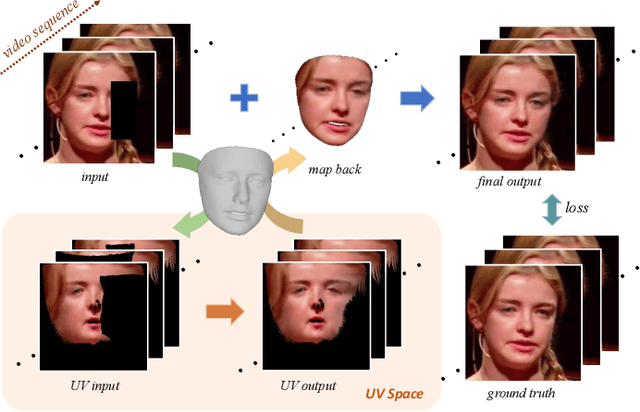
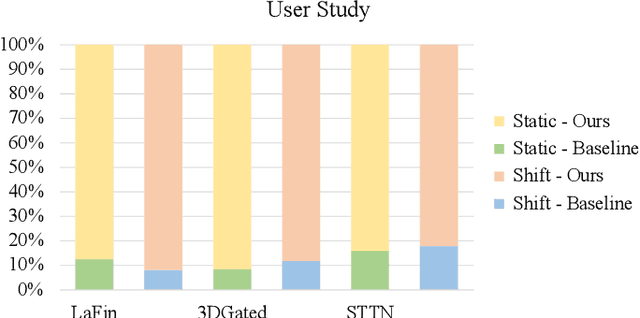
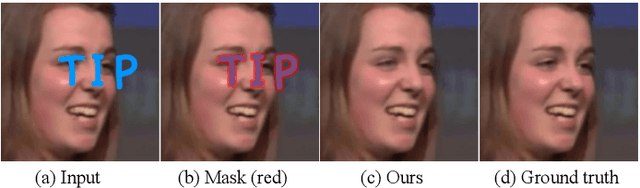
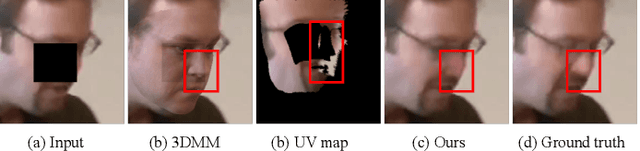
This paper addresses the problem of face video inpainting. Existing video inpainting methods target primarily at natural scenes with repetitive patterns. They do not make use of any prior knowledge of the face to help retrieve correspondences for the corrupted face. They therefore only achieve sub-optimal results, particularly for faces under large pose and expression variations where face components appear very differently across frames. In this paper, we propose a two-stage deep learning method for face video inpainting. We employ 3DMM as our 3D face prior to transform a face between the image space and the UV (texture) space. In Stage I, we perform face inpainting in the UV space. This helps to largely remove the influence of face poses and expressions and makes the learning task much easier with well aligned face features. We introduce a frame-wise attention module to fully exploit correspondences in neighboring frames to assist the inpainting task. In Stage II, we transform the inpainted face regions back to the image space and perform face video refinement that inpaints any background regions not covered in Stage I and also refines the inpainted face regions. Extensive experiments have been carried out which show our method can significantly outperform methods based merely on 2D information, especially for faces under large pose and expression variations.
Iris Recognition Based on SIFT Features
Oct 30, 2021Biometric methods based on iris images are believed to allow very high accuracy, and there has been an explosion of interest in iris biometrics in recent years. In this paper, we use the Scale Invariant Feature Transformation (SIFT) for recognition using iris images. Contrarily to traditional iris recognition systems, the SIFT approach does not rely on the transformation of the iris pattern to polar coordinates or on highly accurate segmentation, allowing less constrained image acquisition conditions. We extract characteristic SIFT feature points in scale space and perform matching based on the texture information around the feature points using the SIFT operator. Experiments are done using the BioSec multimodal database, which includes 3,200 iris images from 200 individuals acquired in two different sessions. We contribute with the analysis of the influence of different SIFT parameters on the recognition performance. We also show the complementarity between the SIFT approach and a popular matching approach based on transformation to polar coordinates and Log-Gabor wavelets. The combination of the two approaches achieves significantly better performance than either of the individual schemes, with a performance improvement of 24% in the Equal Error Rate.
Informative Image Captioning with External Sources of Information
Jun 20, 2019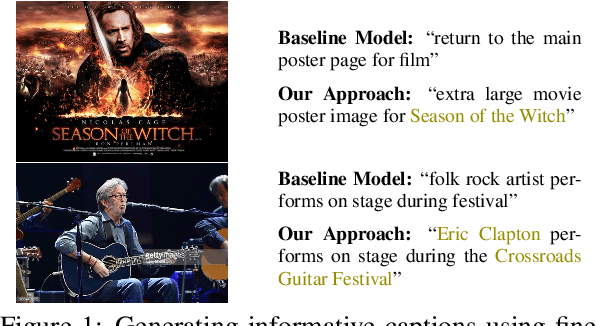
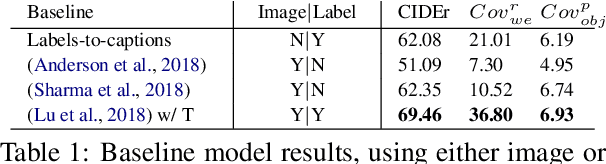
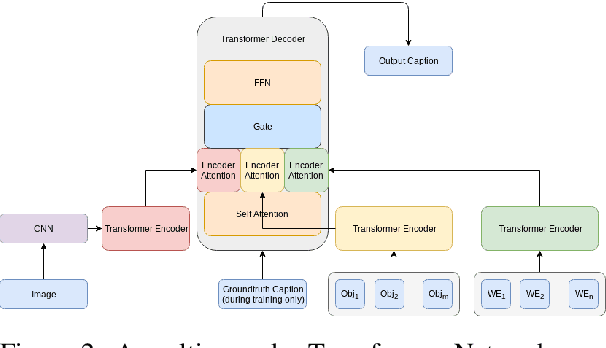
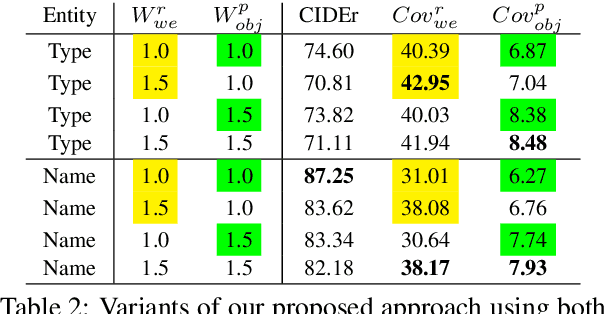
An image caption should fluently present the essential information in a given image, including informative, fine-grained entity mentions and the manner in which these entities interact. However, current captioning models are usually trained to generate captions that only contain common object names, thus falling short on an important "informativeness" dimension. We present a mechanism for integrating image information together with fine-grained labels (assumed to be generated by some upstream models) into a caption that describes the image in a fluent and informative manner. We introduce a multimodal, multi-encoder model based on Transformer that ingests both image features and multiple sources of entity labels. We demonstrate that we can learn to control the appearance of these entity labels in the output, resulting in captions that are both fluent and informative.
Dynamic Differential-Privacy Preserving SGD
Oct 30, 2021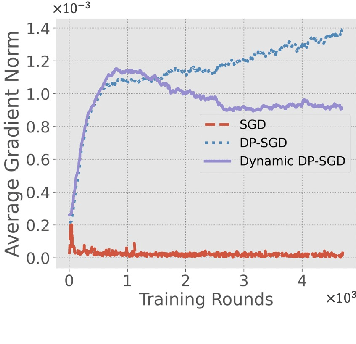
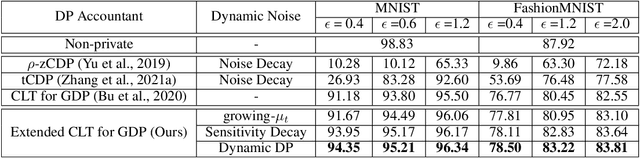
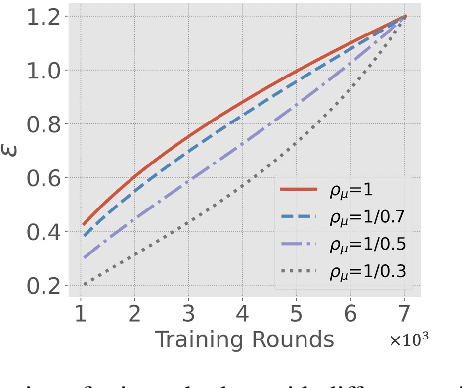
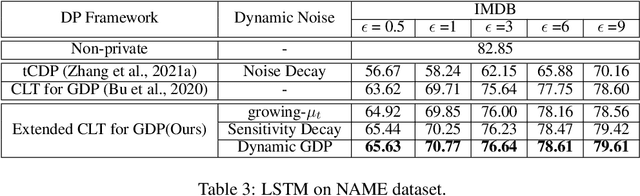
Differentially-Private Stochastic Gradient Descent (DP-SGD) prevents training-data privacy breaches by adding noise to the clipped gradient during SGD training to satisfy the differential privacy (DP) definition. On the other hand, the same clipping operation and additive noise across training steps results in unstable updates and even a ramp-up period, which significantly reduces the model's accuracy. In this paper, we extend the Gaussian DP central limit theorem to calibrate the clipping value and the noise power for each individual step separately. We, therefore, are able to propose the dynamic DP-SGD, which has a lower privacy cost than the DP-SGD during updates until they achieve the same target privacy budget at a target number of updates. Dynamic DP-SGD, in particular, improves model accuracy without sacrificing privacy by gradually lowering both clipping value and noise power while adhering to a total privacy budget constraint. Extensive experiments on a variety of deep learning tasks, including image classification, natural language processing, and federated learning, show that the proposed dynamic DP-SGD algorithm stabilizes updates and, as a result, significantly improves model accuracy in the strong privacy protection region when compared to DP-SGD.
Temporal Knowledge Propagation for Image-to-Video Person Re-identification
Aug 11, 2019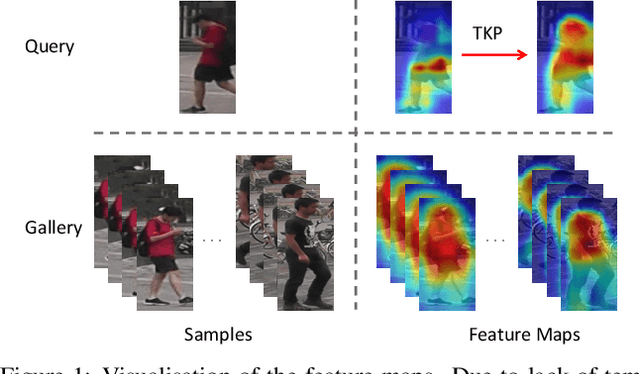
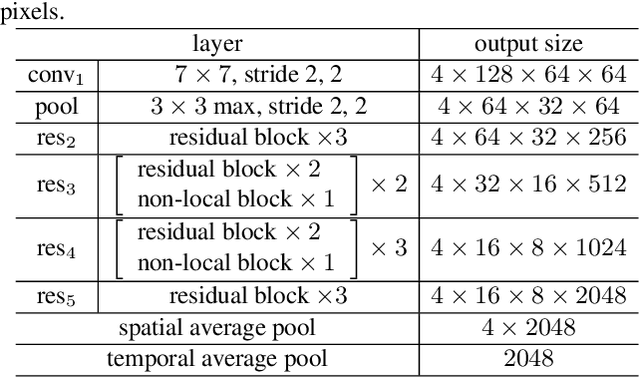
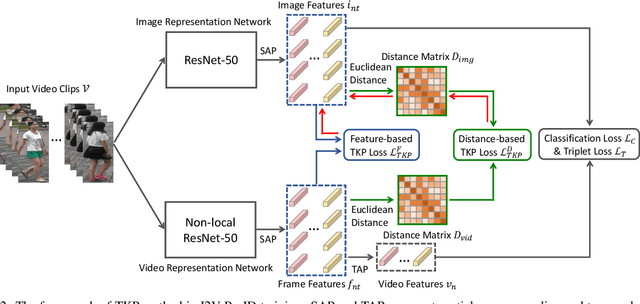
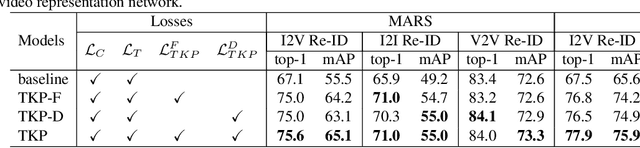
In many scenarios of Person Re-identification (Re-ID), the gallery set consists of lots of surveillance videos and the query is just an image, thus Re-ID has to be conducted between image and videos. Compared with videos, still person images lack temporal information. Besides, the information asymmetry between image and video features increases the difficulty in matching images and videos. To solve this problem, we propose a novel Temporal Knowledge Propagation (TKP) method which propagates the temporal knowledge learned by the video representation network to the image representation network. Specifically, given the input videos, we enforce the image representation network to fit the outputs of video representation network in a shared feature space. With back propagation, temporal knowledge can be transferred to enhance the image features and the information asymmetry problem can be alleviated. With additional classification and integrated triplet losses, our model can learn expressive and discriminative image and video features for image-to-video re-identification. Extensive experiments demonstrate the effectiveness of our method and the overall results on two widely used datasets surpass the state-of-the-art methods by a large margin.