 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Image": models, code, and papers
Image Forgery Detection with Interpretability
Feb 02, 2022
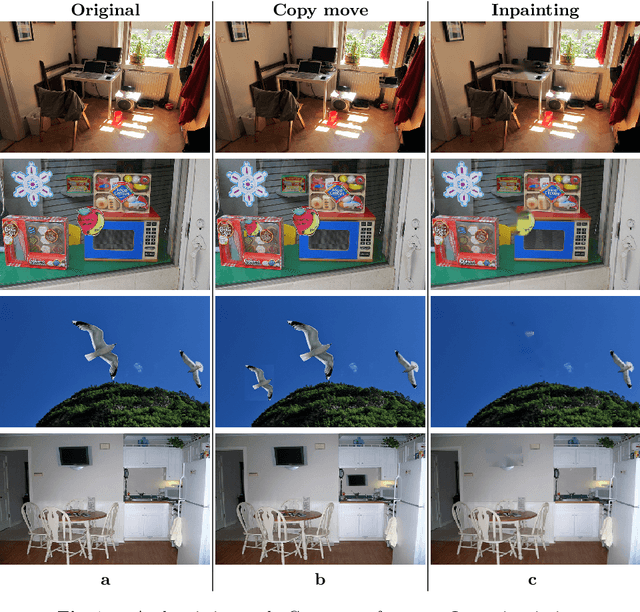
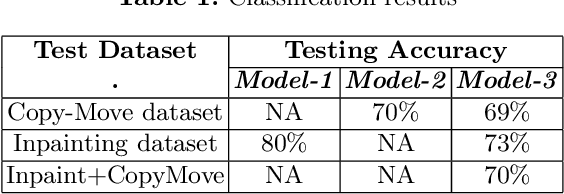
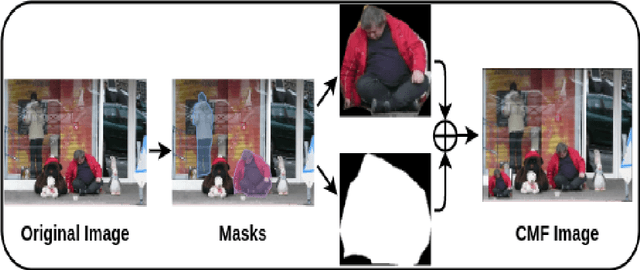
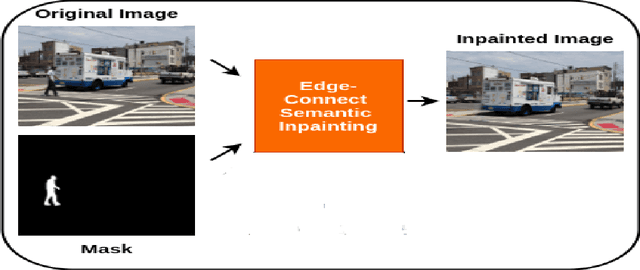
In this work, we present a learning based method focusing on the convolutional neural network (CNN) architecture to detect these forgeries. We consider the detection of both copy-move forgeries and inpainting based forgeries. For these, we synthesize our own large dataset. In addition to classification, the focus is also on interpretability of the forgery detection. As the CNN classification yields the image-level label, it is important to understand if forged region has indeed contributed to the classification. For this purpose, we demonstrate using the Grad-CAM heatmap, that in various correctly classified examples, that the forged region is indeed the region contributing to the classification. Interestingly, this is also applicable for small forged regions, as is depicted in our results. Such an analysis can also help in establishing the reliability of the classification.
Visual Language Maps for Robot Navigation
Oct 17, 2022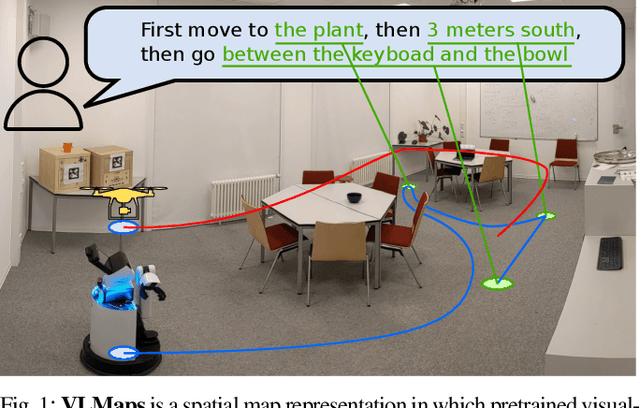
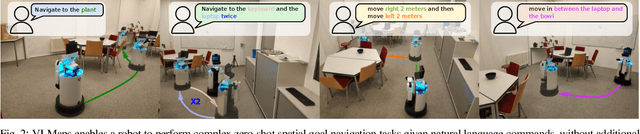
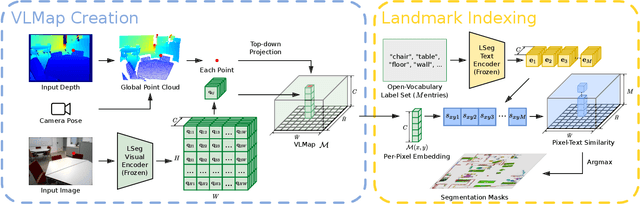
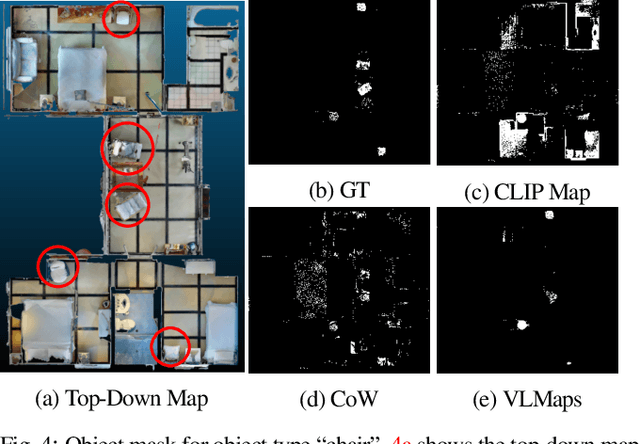
Grounding language to the visual observations of a navigating agent can be performed using off-the-shelf visual-language models pretrained on Internet-scale data (e.g., image captions). While this is useful for matching images to natural language descriptions of object goals, it remains disjoint from the process of mapping the environment, so that it lacks the spatial precision of classic geometric maps. To address this problem, we propose VLMaps, a spatial map representation that directly fuses pretrained visual-language features with a 3D reconstruction of the physical world. VLMaps can be autonomously built from video feed on robots using standard exploration approaches and enables natural language indexing of the map without additional labeled data. Specifically, when combined with large language models (LLMs), VLMaps can be used to (i) translate natural language commands into a sequence of open-vocabulary navigation goals (which, beyond prior work, can be spatial by construction, e.g., "in between the sofa and TV" or "three meters to the right of the chair") directly localized in the map, and (ii) can be shared among multiple robots with different embodiments to generate new obstacle maps on-the-fly (by using a list of obstacle categories). Extensive experiments carried out in simulated and real world environments show that VLMaps enable navigation according to more complex language instructions than existing methods. Videos are available at https://vlmaps.github.io.
Unsupervised Object-Centric Learning with Bi-Level Optimized Query Slot Attention
Oct 17, 2022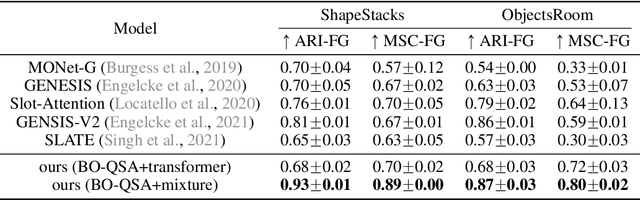
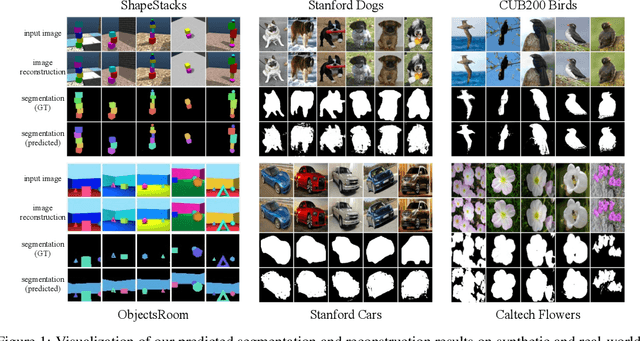
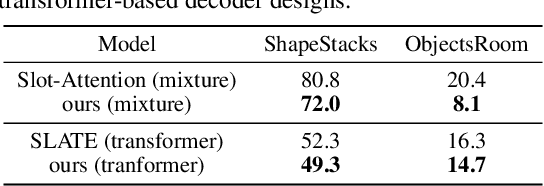
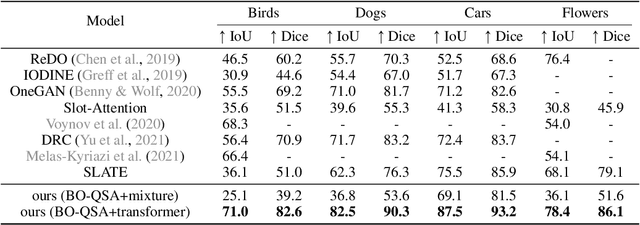
The ability to decompose complex natural scenes into meaningful object-centric abstractions lies at the core of human perception and reasoning. In the recent culmination of unsupervised object-centric learning, the Slot-Attention module has played an important role with its simple yet effective design and fostered many powerful variants. These methods, however, have been exceedingly difficult to train without supervision and are ambiguous in the notion of object, especially for complex natural scenes. In this paper, we propose to address these issues by (1) initializing Slot-Attention modules with learnable queries and (2) optimizing the model with bi-level optimization. With simple code adjustments on the vanilla Slot-Attention, our model, Bi-level Optimized Query Slot Attention, achieves state-of-the-art results on both synthetic and complex real-world datasets in unsupervised image segmentation and reconstruction, outperforming previous baselines by a large margin (~10%). We provide thorough ablative studies to validate the necessity and effectiveness of our design. Additionally, our model exhibits excellent potential for concept binding and zero-shot learning. We hope our effort could provide a single home for the design and learning of slot-based models and pave the way for more challenging tasks in object-centric learning. Our implementation is publicly available at https://github.com/Wall-Facer-liuyu/BO-QSA.
Self-Supervised Learning Through Efference Copies
Oct 17, 2022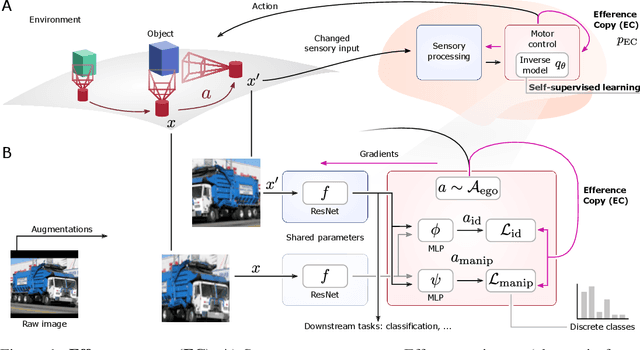
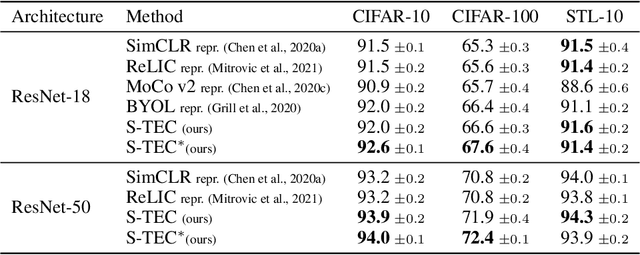
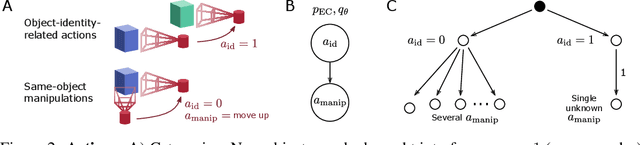
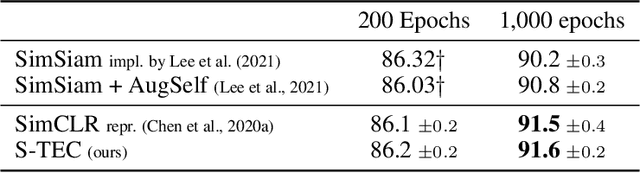
Self-supervised learning (SSL) methods aim to exploit the abundance of unlabelled data for machine learning (ML), however the underlying principles are often method-specific. An SSL framework derived from biological first principles of embodied learning could unify the various SSL methods, help elucidate learning in the brain, and possibly improve ML. SSL commonly transforms each training datapoint into a pair of views, uses the knowledge of this pairing as a positive (i.e. non-contrastive) self-supervisory sign, and potentially opposes it to unrelated, (i.e. contrastive) negative examples. Here, we show that this type of self-supervision is an incomplete implementation of a concept from neuroscience, the Efference Copy (EC). Specifically, the brain also transforms the environment through efference, i.e. motor commands, however it sends to itself an EC of the full commands, i.e. more than a mere SSL sign. In addition, its action representations are likely egocentric. From such a principled foundation we formally recover and extend SSL methods such as SimCLR, BYOL, and ReLIC under a common theoretical framework, i.e. Self-supervision Through Efference Copies (S-TEC). Empirically, S-TEC restructures meaningfully the within- and between-class representations. This manifests as improvement in recent strong SSL baselines in image classification, segmentation, object detection, and in audio. These results hypothesize a testable positive influence from the brain's motor outputs onto its sensory representations.
How many radiographs are needed to re-train a deep learning system for object detection?
Oct 17, 2022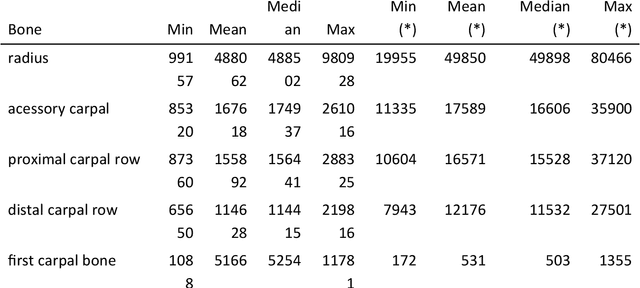
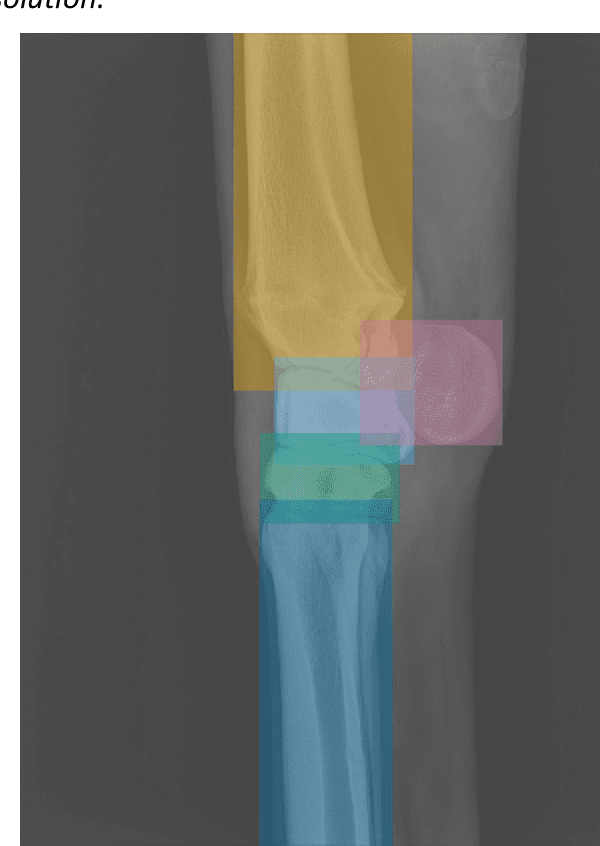
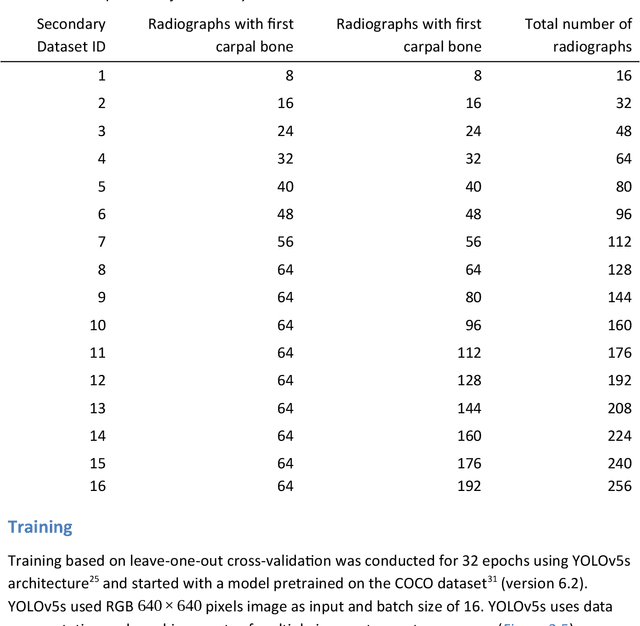
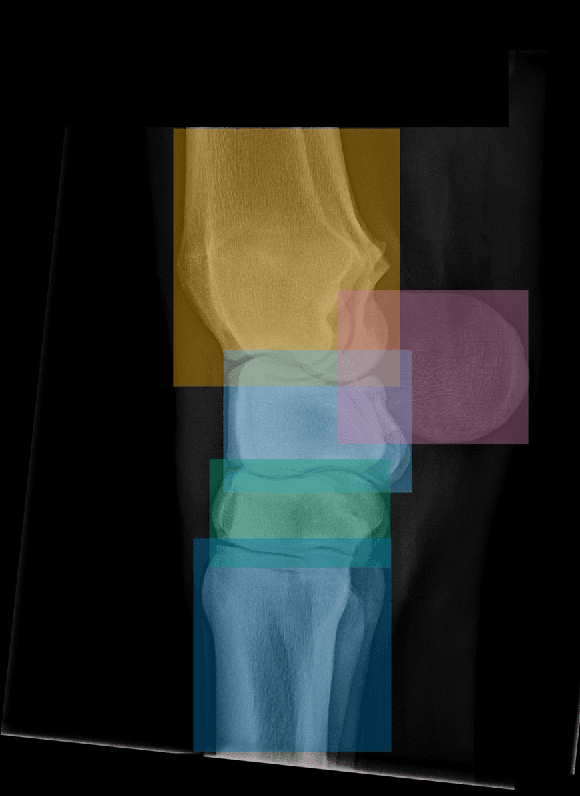
Background: Object detection in radiograph computer vision has largely benefited from progress in deep convolutional neural networks and can, for example, annotate a radiograph with a box around a knee joint or intervertebral disc. Is deep learning capable of detect small (less than 1% of the image) in radiographs? And how many radiographs do we need use when re-training a deep learning model? Methods: We annotated 396 radiographs of left and right carpi dorsal 75 medial to palmarolateral oblique (DMPLO) projection with the location of radius, proximal row of carpal bones, distal row of carpal bones, accessory carpal bone, first carpal bone (if present), and metacarpus (metacarpal II, III, and IV). The radiographs and respective annotations were splited into sets that were used to leave-one-out cross-validation of models created using transfer learn from YOLOv5s. Results: Models trained using 96 radiographs or more achieved precision, recall and mAP above 0.95, including for the first carpal bone, when trained for 32 epochs. The best model needed the double of epochs to learn to detect the first carpal bone compared with the other bones. Conclusions: Free and open source state of the art object detection models based on deep learning can be re-trained for radiograph computer vision applications with 100 radiographs and achieved precision, recall and mAP above 0.95.
Real Image Inversion via Segments
Oct 12, 2021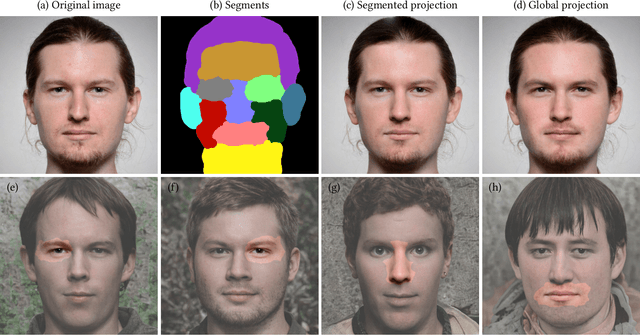
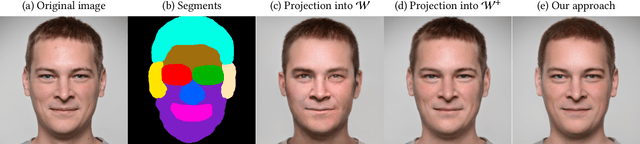
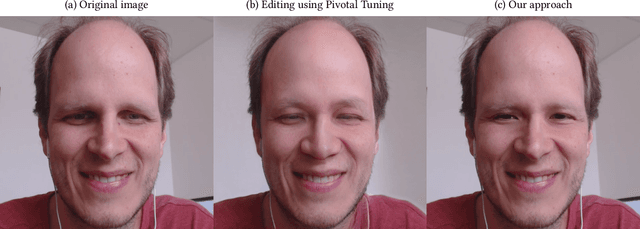

In this short report, we present a simple, yet effective approach to editing real images via generative adversarial networks (GAN). Unlike previous techniques, that treat all editing tasks as an operation that affects pixel values in the entire image in our approach we cut up the image into a set of smaller segments. For those segments corresponding latent codes of a generative network can be estimated with greater accuracy due to the lower number of constraints. When codes are altered by the user the content in the image is manipulated locally while the rest of it remains unaffected. Thanks to this property the final edited image better retains the original structures and thus helps to preserve natural look.
SPICE: Self-Supervised Learning for MRI with Automatic Coil Sensitivity Estimation
Oct 05, 2022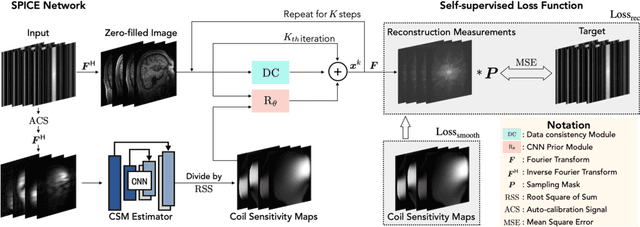
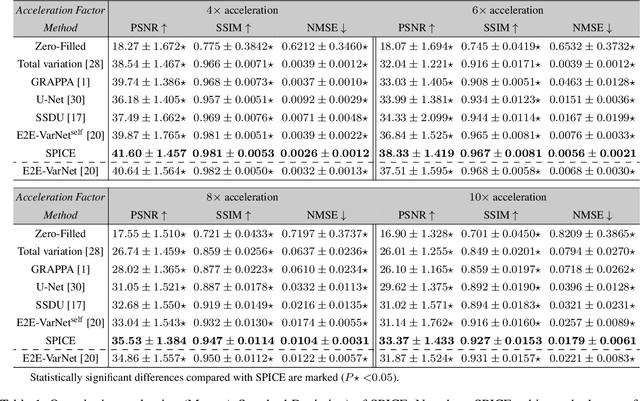
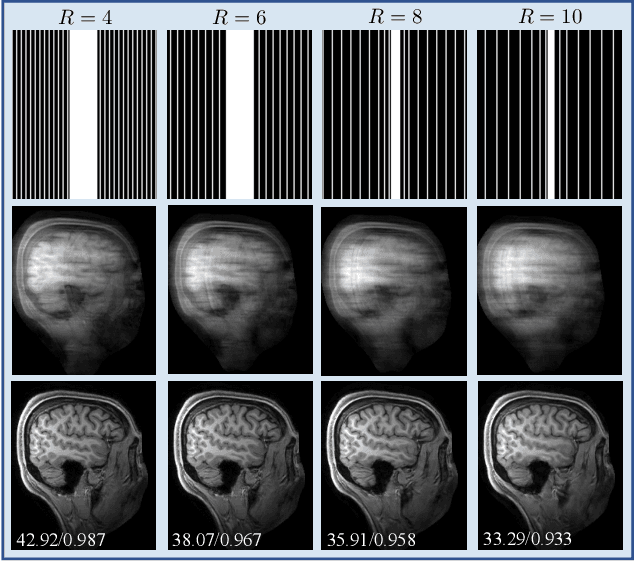
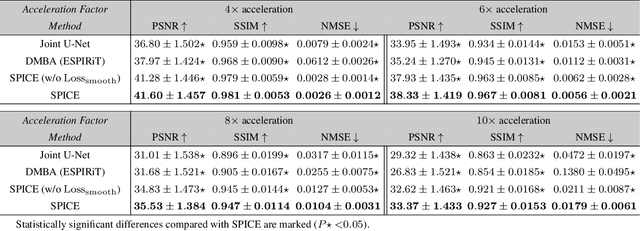
Deep model-based architectures (DMBAs) integrating physical measurement models and learned image regularizers are widely used in parallel magnetic resonance imaging (PMRI). Traditional DMBAs for PMRI rely on pre-estimated coil sensitivity maps (CSMs) as a component of the measurement model. However, estimation of accurate CSMs is a challenging problem when measurements are highly undersampled. Additionally, traditional training of DMBAs requires high-quality groundtruth images, limiting their use in applications where groundtruth is difficult to obtain. This paper addresses these issues by presenting SPICE as a new method that integrates self-supervised learning and automatic coil sensitivity estimation. Instead of using pre-estimated CSMs, SPICE simultaneously reconstructs accurate MR images and estimates high-quality CSMs. SPICE also enables learning from undersampled noisy measurements without any groundtruth. We validate SPICE on experimentally collected data, showing that it can achieve state-of-the-art performance in highly accelerated data acquisition settings (up to 10x).
Random Weight Factorization Improves the Training of Continuous Neural Representations
Oct 05, 2022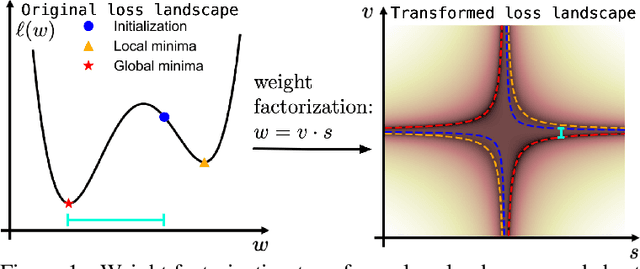
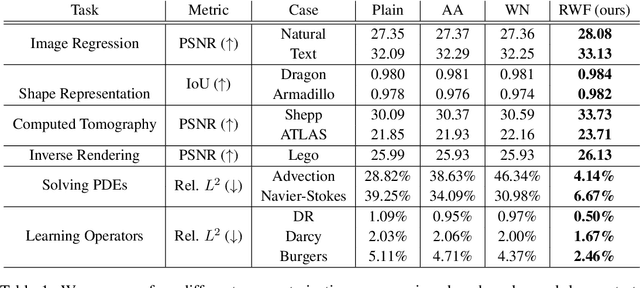
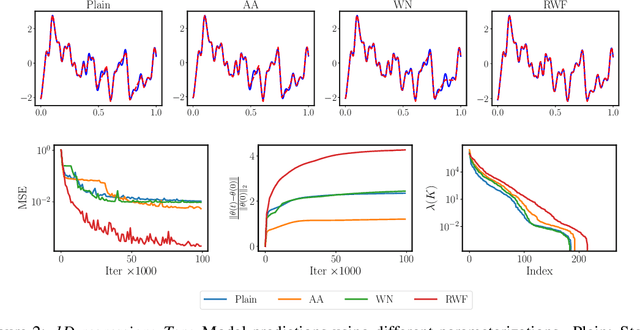
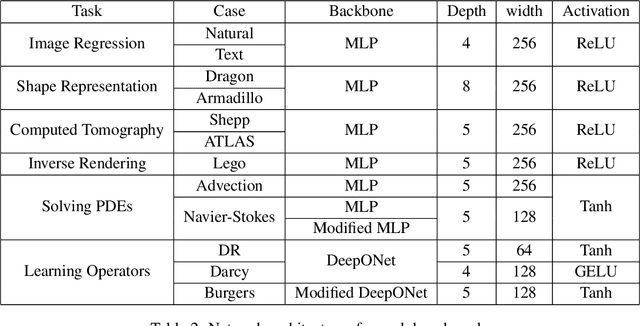
Continuous neural representations have recently emerged as a powerful and flexible alternative to classical discretized representations of signals. However, training them to capture fine details in multi-scale signals is difficult and computationally expensive. Here we propose random weight factorization as a simple drop-in replacement for parameterizing and initializing conventional linear layers in coordinate-based multi-layer perceptrons (MLPs) that significantly accelerates and improves their training. We show how this factorization alters the underlying loss landscape and effectively enables each neuron in the network to learn using its own self-adaptive learning rate. This not only helps with mitigating spectral bias, but also allows networks to quickly recover from poor initializations and reach better local minima. We demonstrate how random weight factorization can be leveraged to improve the training of neural representations on a variety of tasks, including image regression, shape representation, computed tomography, inverse rendering, solving partial differential equations, and learning operators between function spaces.
Shuffle Instances-based Vision Transformer for Pancreatic Cancer ROSE Image Classification
Aug 14, 2022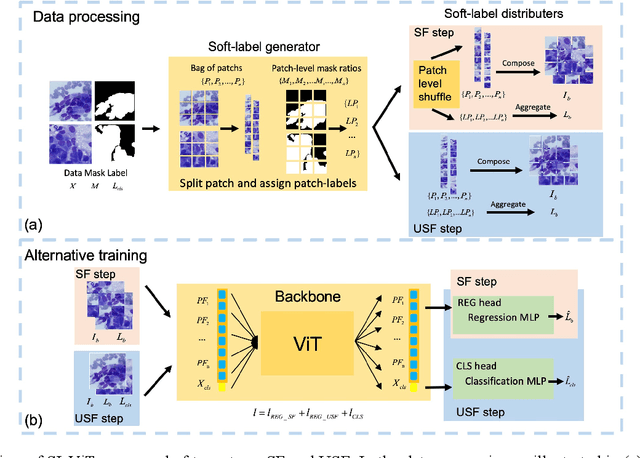
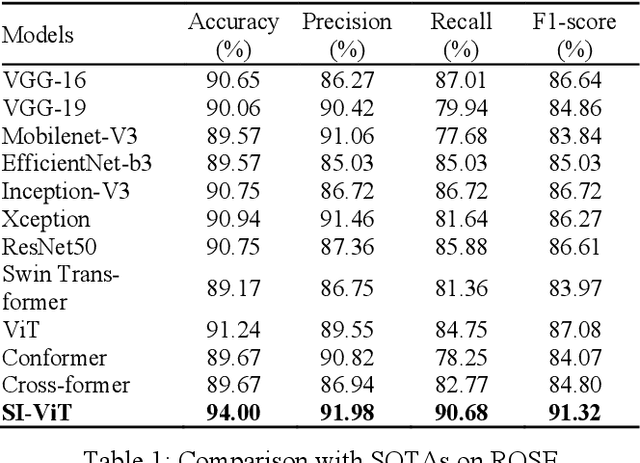
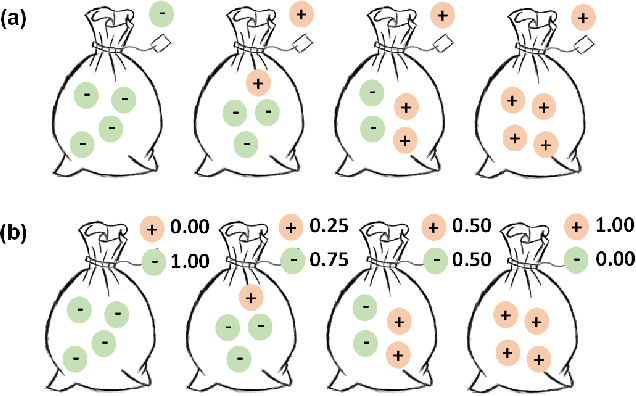
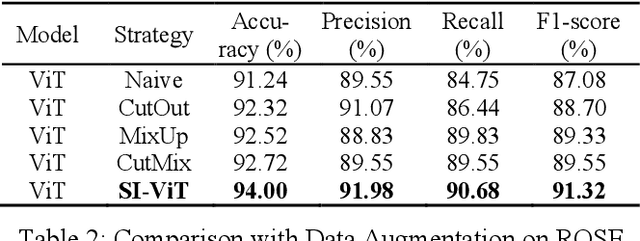
The rapid on-site evaluation (ROSE) technique can signifi-cantly accelerate the diagnosis of pancreatic cancer by im-mediately analyzing the fast-stained cytopathological images. Computer-aided diagnosis (CAD) can potentially address the shortage of pathologists in ROSE. However, the cancerous patterns vary significantly between different samples, making the CAD task extremely challenging. Besides, the ROSE images have complicated perturbations regarding color distribution, brightness, and contrast due to different staining qualities and various acquisition device types. To address these challenges, we proposed a shuffle instances-based Vision Transformer (SI-ViT) approach, which can reduce the perturbations and enhance the modeling among the instances. With the regrouped bags of shuffle instances and their bag-level soft labels, the approach utilizes a regression head to make the model focus on the cells rather than various perturbations. Simultaneously, combined with a classification head, the model can effectively identify the general distributive patterns among different instances. The results demonstrate significant improvements in the classification accuracy with more accurate attention regions, indicating that the diverse patterns of ROSE images are effectively extracted, and the complicated perturbations are significantly reduced. It also suggests that the SI-ViT has excellent potential in analyzing cytopathological images. The code and experimental results are available at https://github.com/sagizty/MIL-SI.
AdaWCT: Adaptive Whitening and Coloring Style Injection
Aug 01, 2022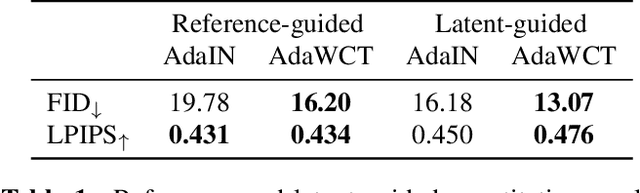


Adaptive instance normalization (AdaIN) has become the standard method for style injection: by re-normalizing features through scale-and-shift operations, it has found widespread use in style transfer, image generation, and image-to-image translation. In this work, we present a generalization of AdaIN which relies on the whitening and coloring transformation (WCT) which we dub AdaWCT, that we apply for style injection in large GANs. We show, through experiments on the StarGANv2 architecture, that this generalization, albeit conceptually simple, results in significant improvements in the quality of the generated images.