 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-based Bayesian inference for multi-fingered robotic grasping
Paper and Code
Sep 29, 2021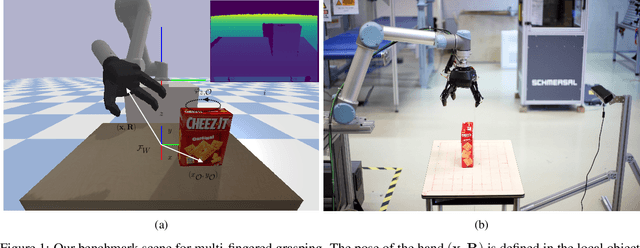
Multi-fingered robotic grasping is an undeniable stepping stone to universal picking and dexterous manipulation. Yet, multi-fingered grippers remain challenging to control because of their rich nonsmooth contact dynamics or because of sensor noise. In this work, we aim to plan hand configurations by performing Bayesian posterior inference through the full stochastic forward simulation of the robot in its environment, hence robustly accounting for many of the uncertainties in the system. While previous methods either relied on simplified surrogates of the likelihood function or attempted to learn to directly predict maximum likelihood estimates, we bring a novel simulation-based approach for full Bayesian inference based on a deep neural network surrogate of the likelihood-to-evidence ratio. Hand configurations are found by directly optimizing through the resulting amortized and differentiable expression for the posterior. The geometry of the configuration space is accounted for by proposing a Riemannian manifold optimization procedure through the neural posterior. Simulation and physical benchmarks demonstrate the high success rate of the procedure.