 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRectification with Visual Sphere perspective: an algebraic alternative for P4P pose estimation
Paper and Code
May 18, 2020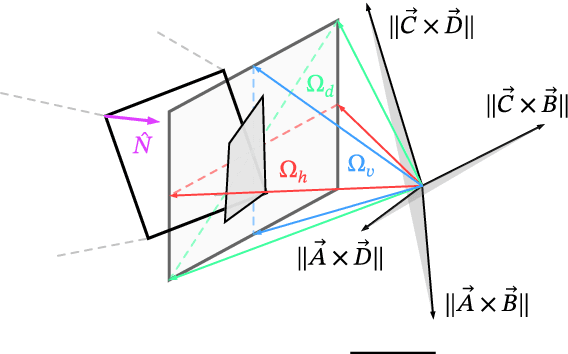


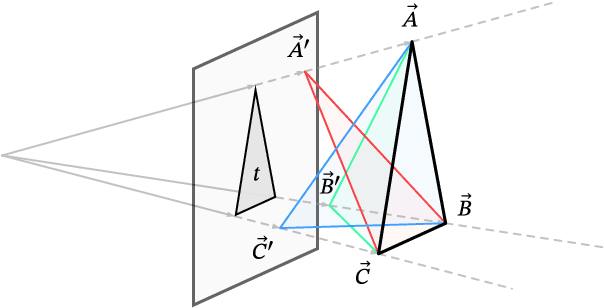
Presented algorithm solves P4P problem for tangent pair of coplanar parallel lines viewed in perspective with an algebraic equation. Introduction of Visual Sphere Perspective model extends this algorithm to exotic non-linear projections, where view angle can span to 180{\deg} and beyond; a hard-limit for rectilinear perspective, common in planar homography and POSIt algorithms. This solution performs full 3D reconstruction of a visible rectangle, including pose estimation, camera orientation and position, without loop iterations. Full pose estimation requires some camera-lens information like focal length (for rectilinear projection) or a perspective map. For a generic 2D, perspective-correct rectification, camera lens information is not required for this method. This paper also presents visual sphere based, iteration-free estimation method for camera's focal length.