 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging LLMs for Mission Planning in Precision Agriculture
Paper and Code

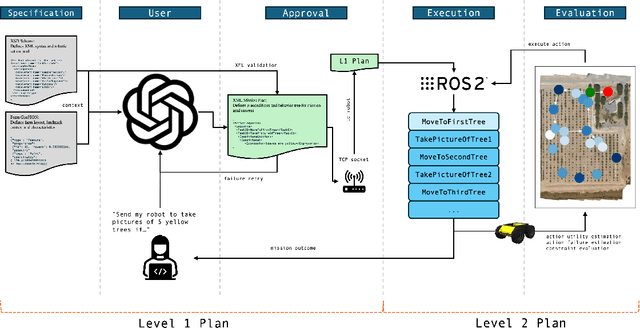
Robotics and artificial intelligence hold significant potential for advancing precision agriculture. While robotic systems have been successfully deployed for various tasks, adapting them to perform diverse missions remains challenging, particularly because end users often lack technical expertise. In this paper, we present an end-to-end system that leverages large language models (LLMs), specifically ChatGPT, to enable users to assign complex data collection tasks to autonomous robots using natural language instructions. To enhance reusability, mission plans are encoded using an existing IEEE task specification standard, and are executed on robots via ROS2 nodes that bridge high-level mission descriptions with existing ROS libraries. Through extensive experiments, we highlight the strengths and limitations of LLMs in this context, particularly regarding spatial reasoning and solving complex routing challenges, and show how our proposed implementation overcomes them.