Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull explicit consistency constraints in uncalibrated multiple homography estimation
Paper and Code
Aug 24, 2018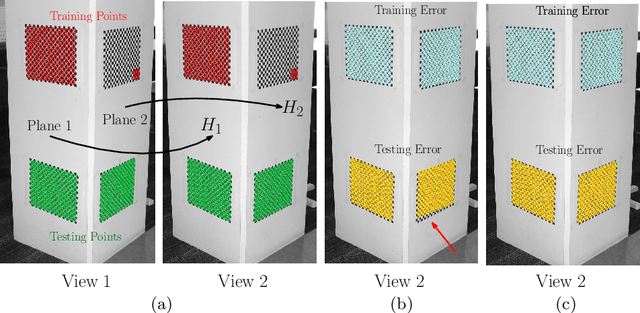
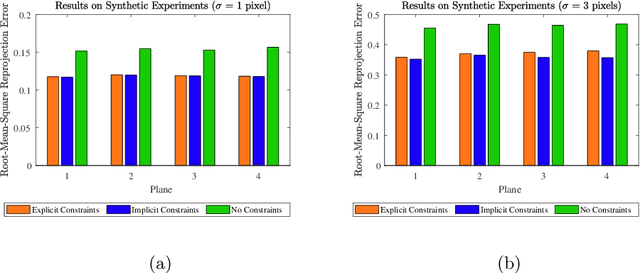
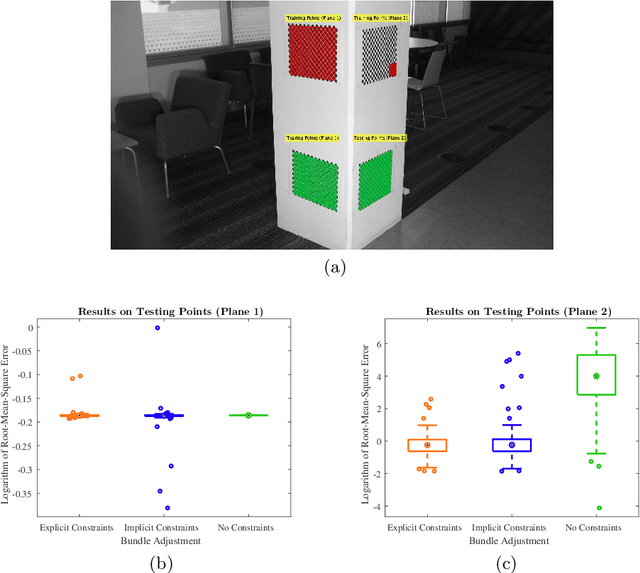
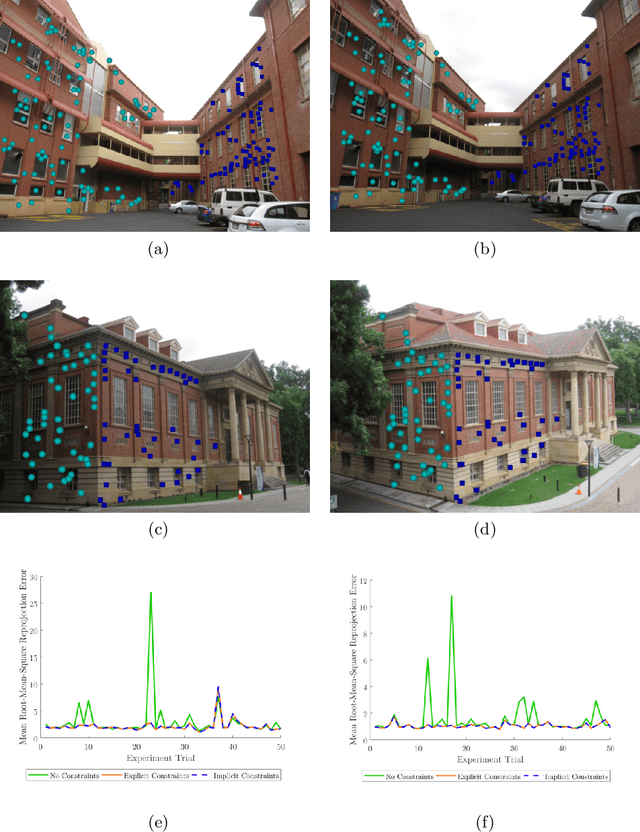
We reveal a complete set of constraints that need to be imposed on a set of 3-by-3 matrices to ensure that the matrices represent genuine homographies associated with multiple planes between two views. We also show how to exploit the constraints to obtain more accurate estimates of homography matrices between two views.
* 16 pages, 3 figures
View paper on