Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoupled Sampling Based Planning Method for Multiple Autonomous Vehicles
Paper and Code
Feb 11, 2017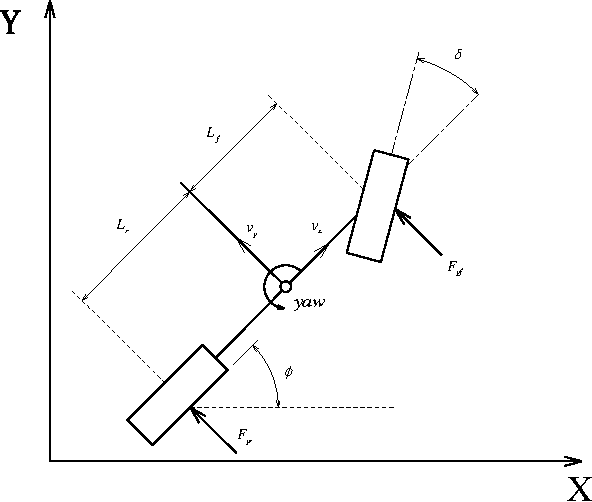
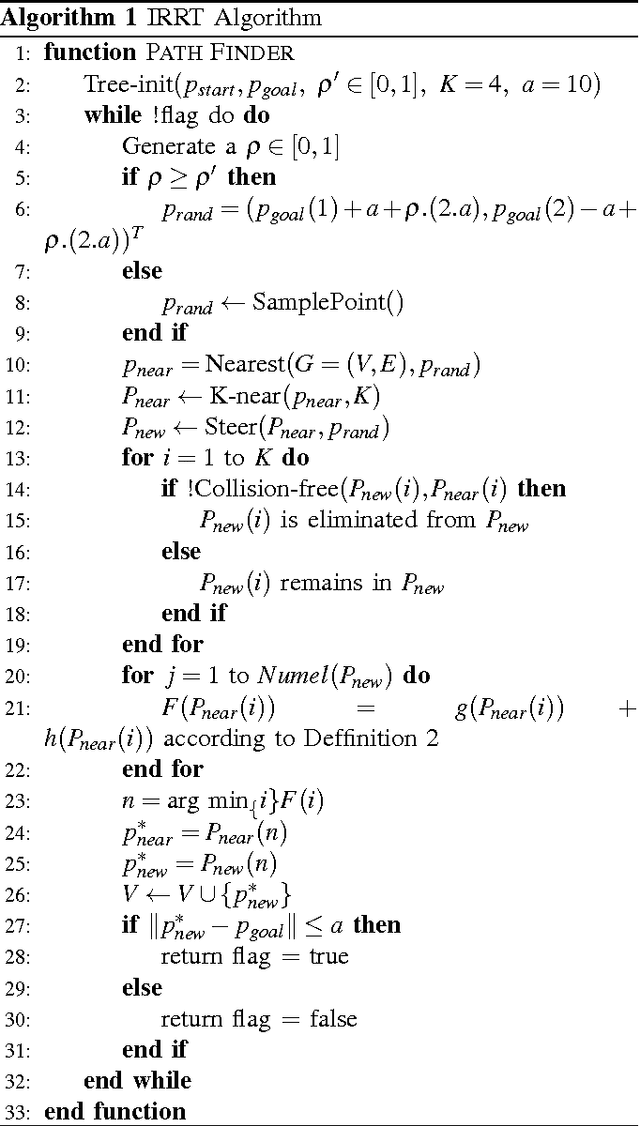
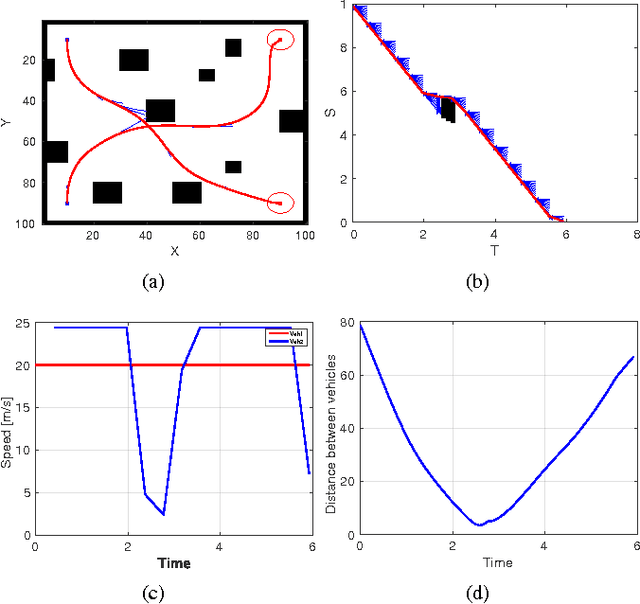
This paper proposes a sampling based planning algorithm to control autonomous vehicles. We propose an improved Rapidly-exploring Random Tree which includes the definition of K- nearest points and propose a two-stage sampling strategy to adjust RRT in other to perform maneuver while avoiding collision. The simulation results show the success of the algorithm.
View paper on