Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecoupled limbs yield differentiable trajectory outcomes through intermittent contact in locomotion and manipulation
Paper and Code
May 23, 2017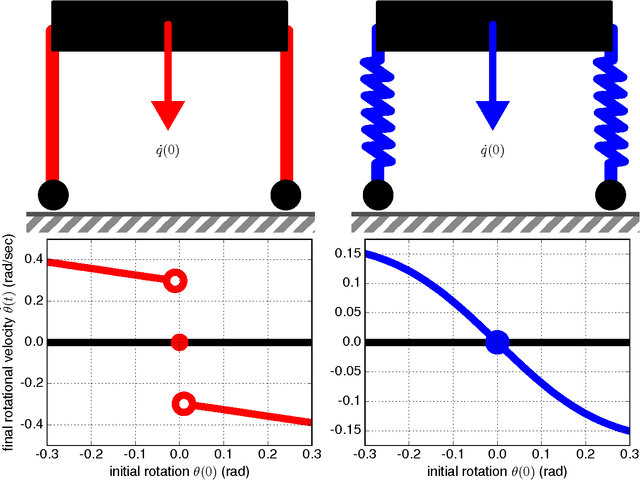
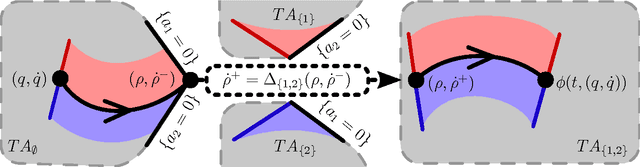
When limbs are decoupled, we find that trajectory outcomes in mechanical systems subject to unilateral constraints vary differentiably with respect to initial conditions, even as the contact mode sequence varies.
View paper on