 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Dynamic Task Allocation in Multi-Robot Systems
Paper and Code
Apr 27, 2006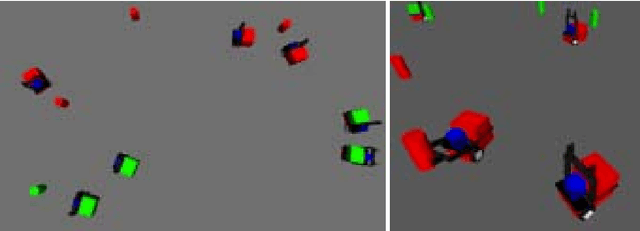
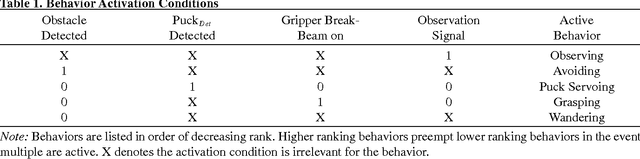
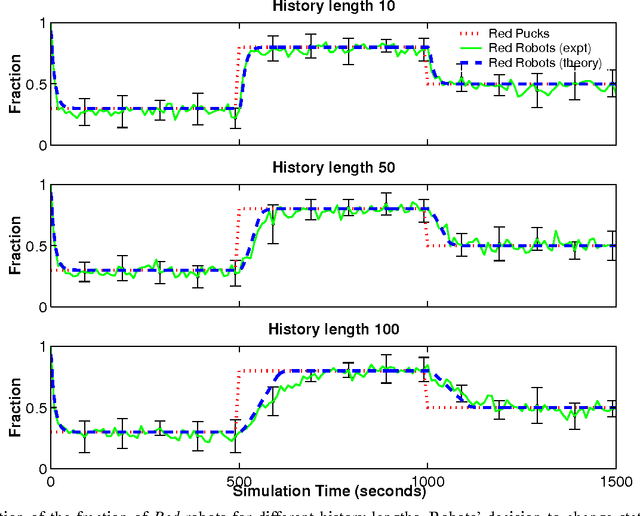
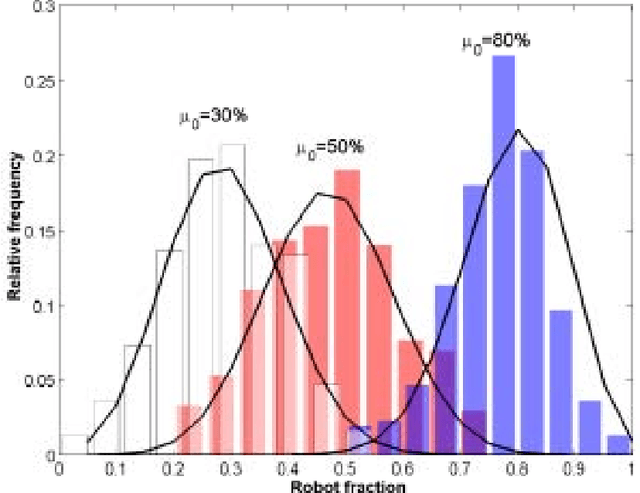
Dynamic task allocation is an essential requirement for multi-robot systems operating in unknown dynamic environments. It allows robots to change their behavior in response to environmental changes or actions of other robots in order to improve overall system performance. Emergent coordination algorithms for task allocation that use only local sensing and no direct communication between robots are attractive because they are robust and scalable. However, a lack of formal analysis tools makes emergent coordination algorithms difficult to design. In this paper we present a mathematical model of a general dynamic task allocation mechanism. Robots using this mechanism have to choose between two types of task, and the goal is to achieve a desired task division in the absence of explicit communication and global knowledge. Robots estimate the state of the environment from repeated local observations and decide which task to choose based on these observations. We model the robots and observations as stochastic processes and study the dynamics of the collective behavior. Specifically, we analyze the effect that the number of observations and the choice of the decision function have on the performance of the system. The mathematical models are validated in a multi-robot multi-foraging scenario. The model's predictions agree very closely with experimental results from sensor-based simulations.