 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegression with respect to sensing actions and partial states
Paper and Code
May 21, 2004
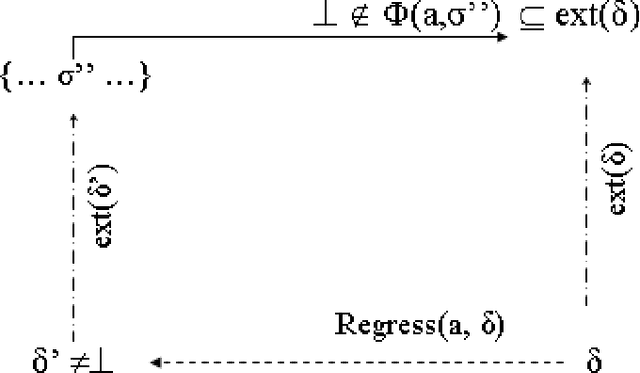
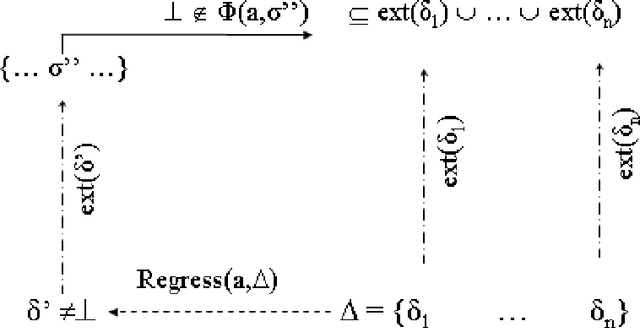
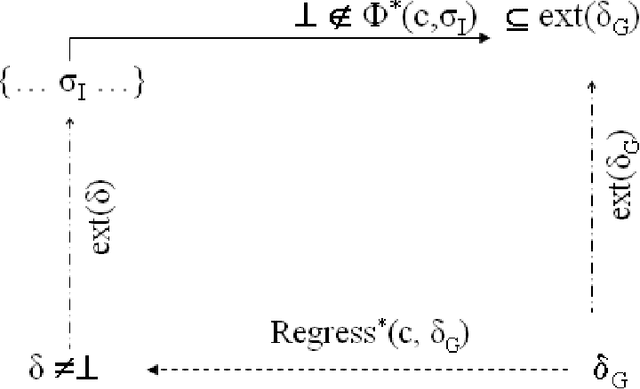
In this paper, we present a state-based regression function for planning domains where an agent does not have complete information and may have sensing actions. We consider binary domains and employ the 0-approximation [Son & Baral 2001] to define the regression function. In binary domains, the use of 0-approximation means using 3-valued states. Although planning using this approach is incomplete with respect to the full semantics, we adopt it to have a lower complexity. We prove the soundness and completeness of our regression formulation with respect to the definition of progression. More specifically, we show that (i) a plan obtained through regression for a planning problem is indeed a progression solution of that planning problem, and that (ii) for each plan found through progression, using regression one obtains that plan or an equivalent one. We then develop a conditional planner that utilizes our regression function. We prove the soundness and completeness of our planning algorithm and present experimental results with respect to several well known planning problems in the literature.