Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovelty Detection on a Mobile Robot Using Habituation
Paper and Code
Jun 02, 2000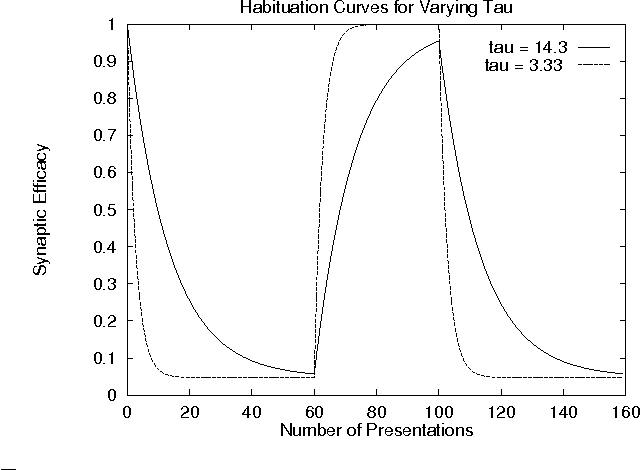
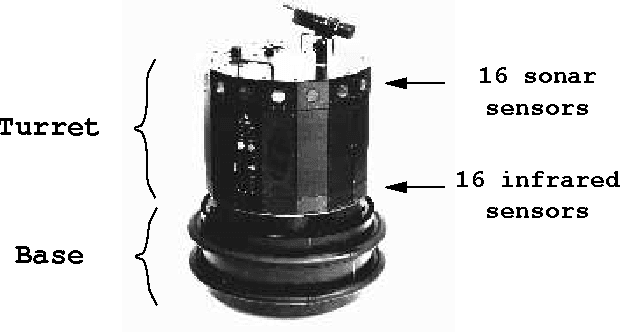
In this paper a novelty filter is introduced which allows a robot operating in an un structured environment to produce a self-organised model of its surroundings and to detect deviations from the learned model. The environment is perceived using the rob ot's 16 sonar sensors. The algorithm produces a novelty measure for each sensor scan relative to the model it has learned. This means that it highlights stimuli which h ave not been previously experienced. The novelty filter proposed uses a model of hab ituation. Habituation is a decrement in behavioural response when a stimulus is pre sented repeatedly. Robot experiments are presented which demonstrate the reliable o peration of the filter in a number of environments.
* 10 pages, 6 figures. In From Animals to Animats, The Sixth
International Conference on Simulation of Adaptive Behaviour, Paris, 2000
View paper on