Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNovelty Detection for Robot Neotaxis
Paper and Code
Jun 02, 2000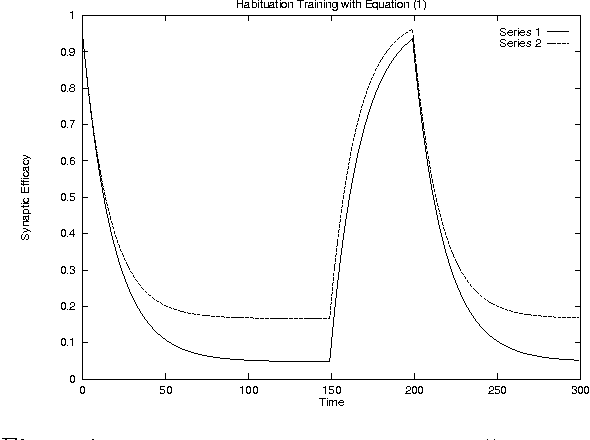

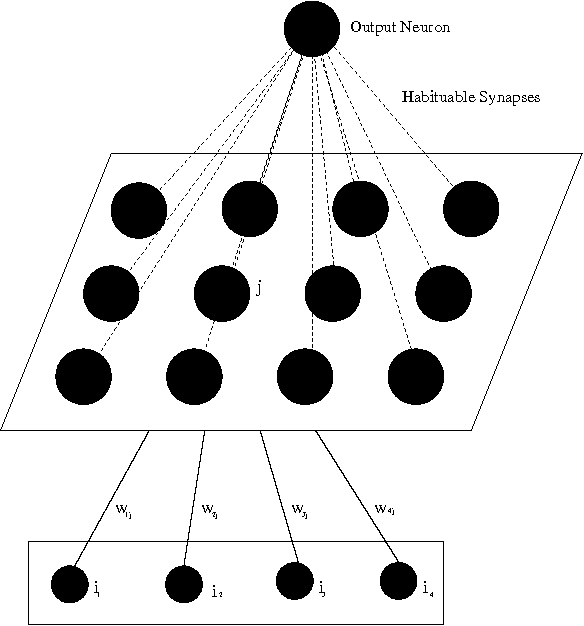
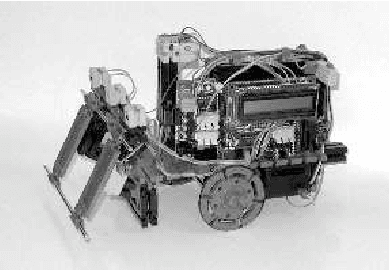
The ability of a robot to detect and respond to changes in its environment is potentially very useful, as it draws attention to new and potentially important features. We describe an algorithm for learning to filter out previously experienced stimuli to allow further concentration on novel features. The algorithm uses a model of habituation, a biological process which causes a decrement in response with repeated presentation. Experiments with a mobile robot are presented in which the robot detects the most novel stimulus and turns towards it (`neotaxis').
* 7 pages, 5 figures. In Proceedings of the Second International
Conference on Neural Computation, 2000
View paper on