 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear stiffness allows passive dynamic hopping for one-legged robots with an upright trunk
Paper and Code
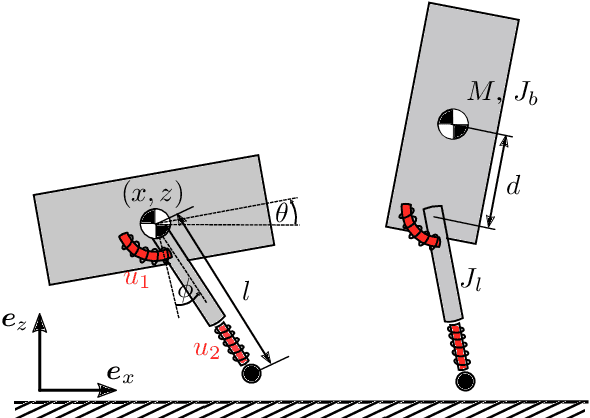
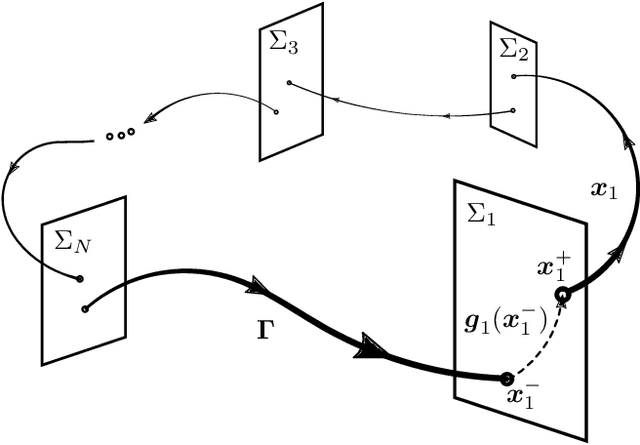
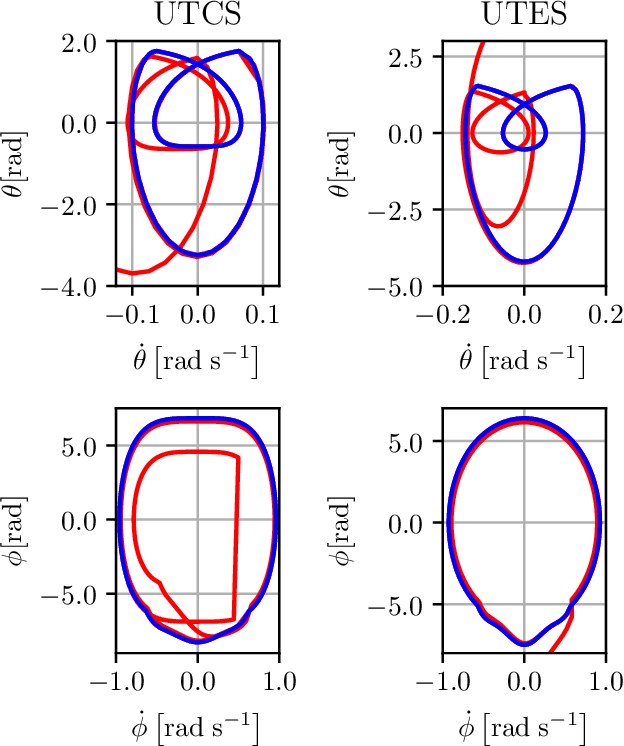
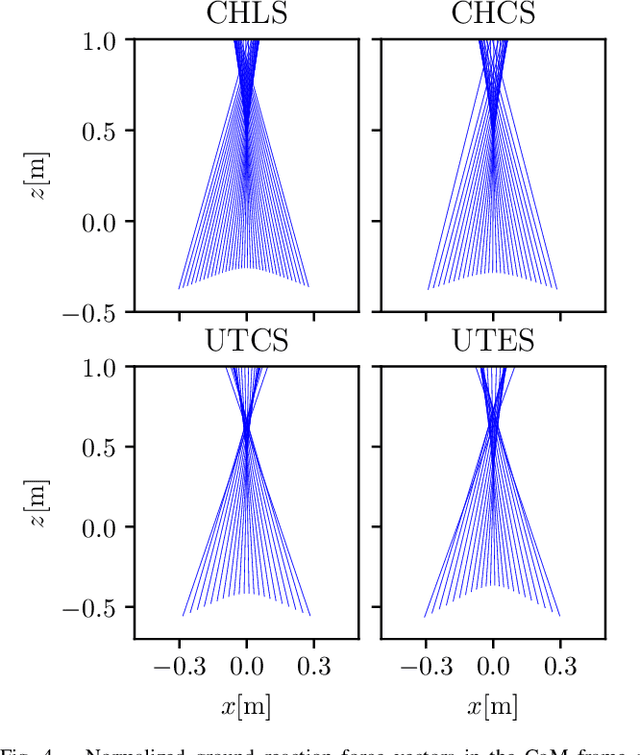
Template models are frequently used to simplify the control dynamics for robot hopping or running. Passive limit cycles can emerge for such systems and be exploited for energy-efficient control. A grand challenge in locomotion is trunk stabilization when the hip is offset from the center of mass (CoM). The swing phase plays a major role in this process due to the moment of inertia of the leg; however, many template models ignore the leg mass. In this work, the authors consider a robot hopper model (RHM) with a rigid trunk and leg plus a hip that is displaced from the CoM. It has been previously shown that no passive limit cycle exists for such a model given a linear hip spring. In this work, we show that passive limit cycles can be found when a nonlinear hip spring is used instead. To the authors' knowledge, this is the first time that a passive limit cycle has been found for this type of system.