Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Improved Baseline Framework for Pose Estimation Challenge at ECCV 2022 Visual Perception for Navigation in Human Environments Workshop
Paper and Code
Mar 13, 2023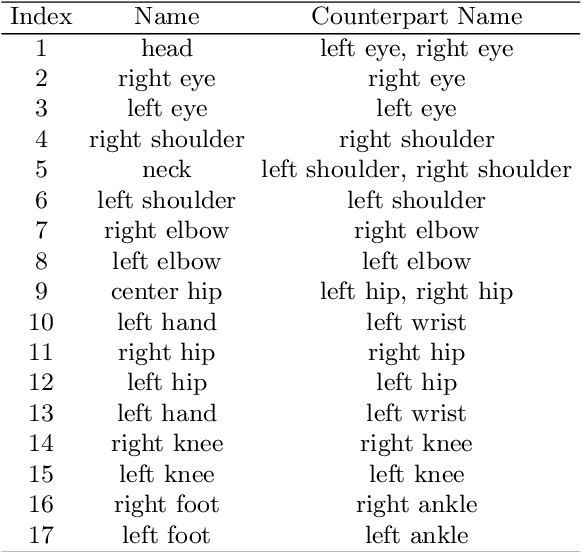
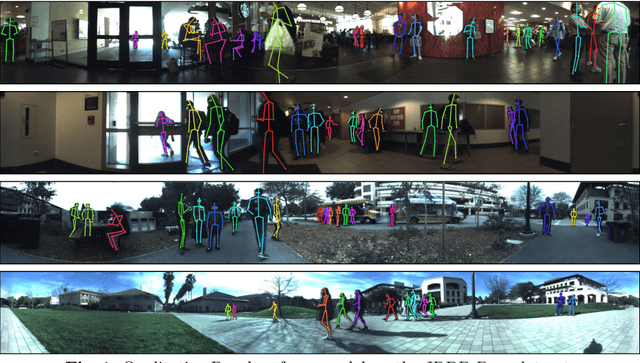
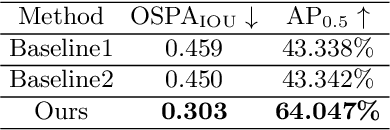

This technical report describes our first-place solution to the pose estimation challenge at ECCV 2022 Visual Perception for Navigation in Human Environments Workshop. In this challenge, we aim to estimate human poses from in-the-wild stitched panoramic images. Our method is built based on Faster R-CNN for human detection, and HRNet for human pose estimation. We describe technical details for the JRDB-Pose dataset, together with some experimental results. In the competition, we achieved 0.303 $\text{OSPA}_{\text{IOU}}$ and 64.047\% $\text{AP}_{\text{0.5}}$ on the test set of JRDB-Pose.
View paper on