 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Data-Efficient Model-Based Learning Framework for the Closed-Loop Control of Continuum Robots
Paper and Code
Apr 22, 2022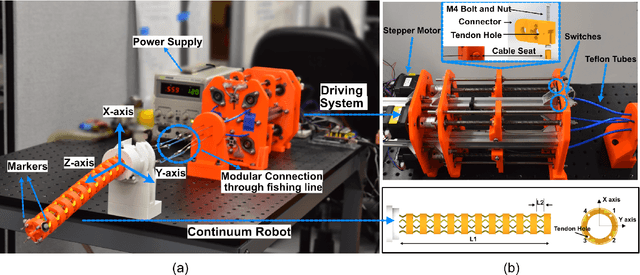
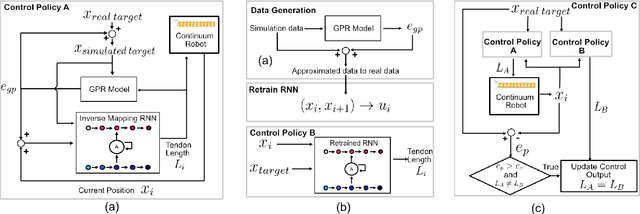
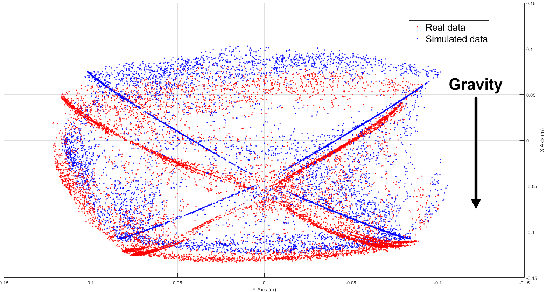
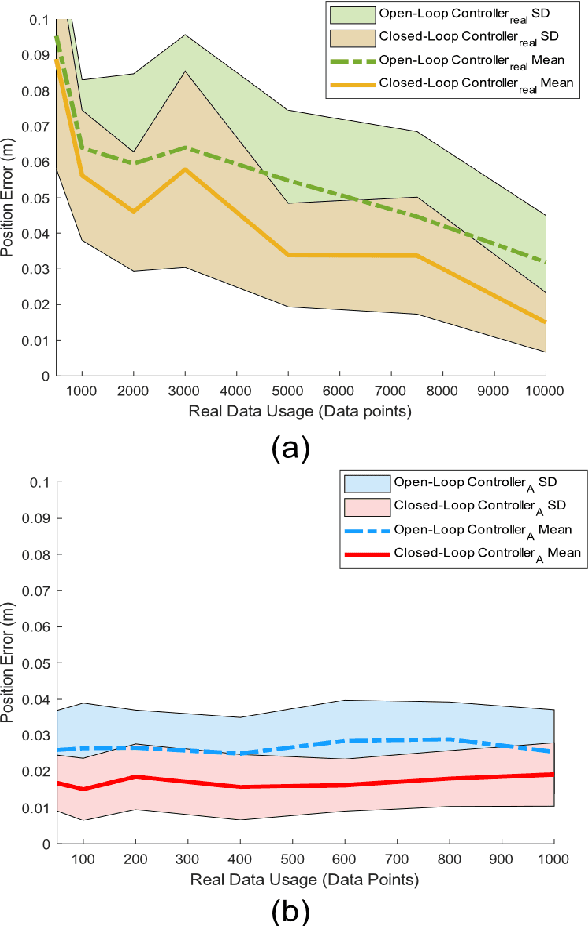
Traditional dynamic models of continuum robots are in general computationally expensive and not suitable for real-time control. Recent approaches using learning-based methods to approximate the dynamic model of continuum robots for control have been promising, although real data hungry -- which may cause potential damage to robots and be time consuming -- and getting poorer performance when trained with simulation data only. This paper presents a model-based learning framework for continuum robot closed-loop control that, by combining simulation and real data, shows to require only 100 real data to outperform a real-data-only controller trained using up to 10000 points. The introduced data-efficient framework with three control policies has utilized a Gaussian process regression (GPR) and a recurrent neural network (RNN). Control policy A uses a GPR model and a RNN trained in simulation to optimize control outputs for simulated targets; control policy B retrains the RNN in policy A with data generated from the GPR model to adapt to real robot physics; control policy C utilizes policy A and B to form a hybrid policy. Using a continuum robot with soft spines, we show that our approach provides an efficient framework to bridge the sim-to-real gap in model-based learning for continuum robots.