 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact Intensity Estimation of a Quadruped Robot without Using a Force Sensor
Paper and Code
Apr 03, 2022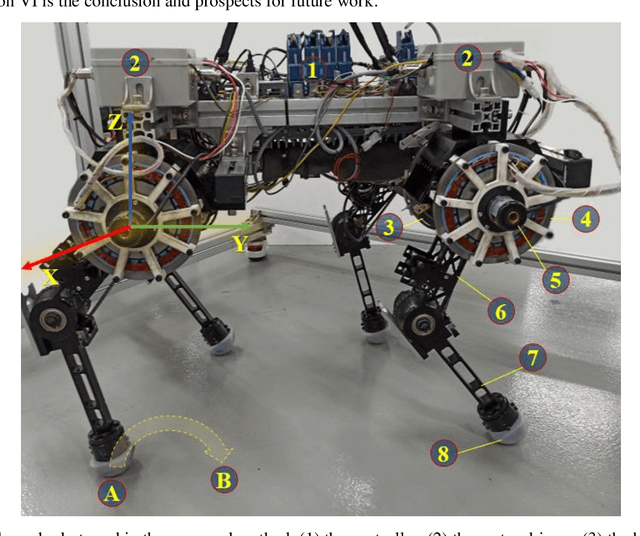
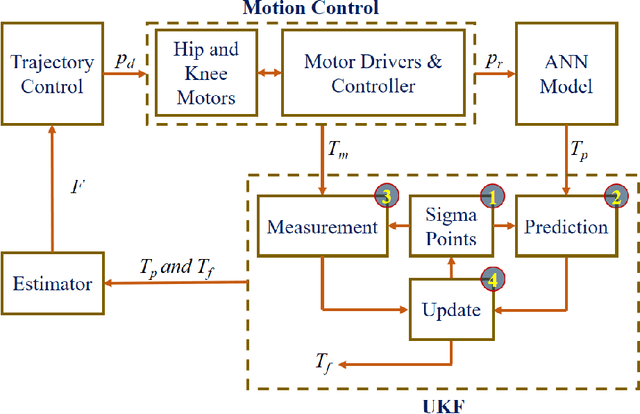
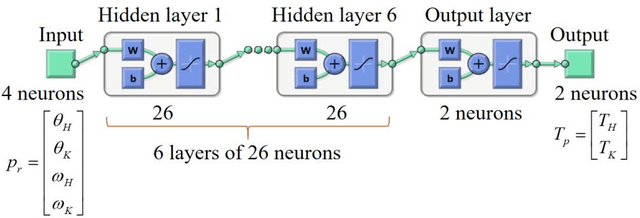
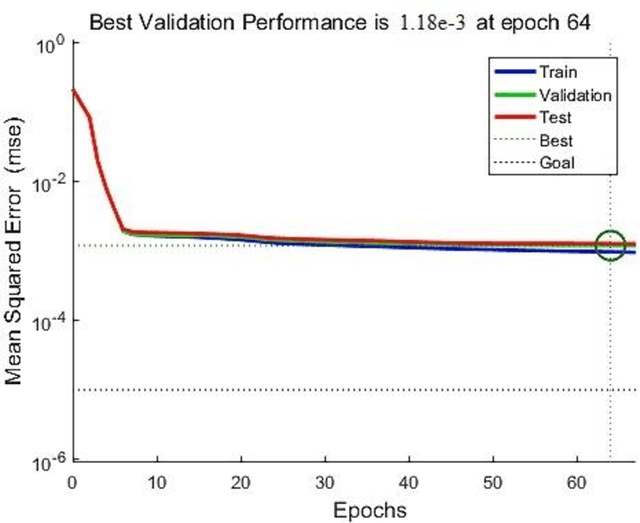
Estimating the impact intensity is one of the significant tasks of the legged robot. Accurate feedback of the impact may support the robot to plan a suitable and efficient trajectory to adapt to unknown complex terrains. Ordinarily, this task is performed by a force sensor in the robot's foot. In this letter, an impact intensity estimation without using a force sensor is proposed. An artificial neural network model is designed to predict the motor torques of the legs in an instantaneous position in the trajectory without utilizing the complex kinematic and dynamic models of motion. An unscented Kalman filter is used during the trajectory to smooth and stabilize the measurement. Based on the difference between the predicted information and the filtered value, the state and intensity of the robot foot's impact with the obstacles are estimated. The simulation and experiment on a quadruped robot are carried out to verify the effectiveness of the proposed method.