 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROLL: Long-Term Robust LiDAR-based Localization With Temporary Mapping in Changing Environments
Paper and Code
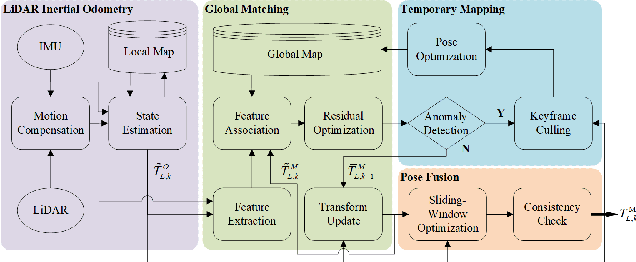
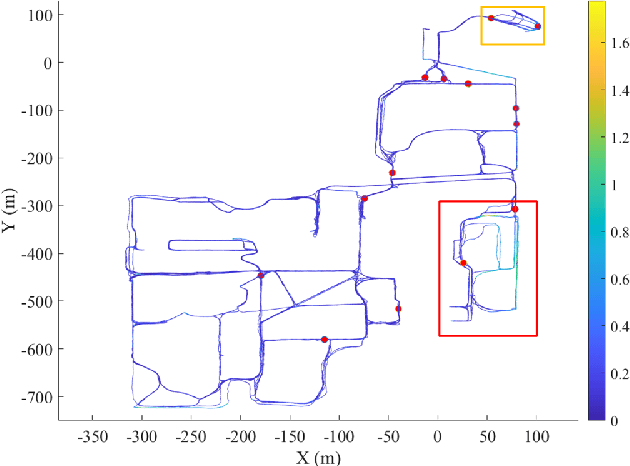
Long-term scene changes present challenges to localization systems using a pre-built map. This paper presents a LiDAR-based system that can provide robust localization against those challenges. Our method starts with activation of a mapping process temporarily when global matching towards the pre-built map is unreliable. The temporary map will be merged onto the pre-built map for later localization runs once reliable matching is obtained again. We further integrate a LiDAR inertial odometry (LIO) to provide motion-compensated LiDAR scans and a reliable initial pose guess for the global matching module. To generate a smooth real-time trajectory for navigation purposes, we fuse poses from odometry and global matching by solving a pose graph optimization problem. We evaluate our localization system with extensive experiments on the NCLT dataset including a variety of changing indoor and outdoor environments, and the results demonstrate a robust and accurate localization performance for over a year. The implementations are open sourced on GitHub.